

Pleading for open modular architectures - Lirmm
Pleading for open modular architectures - Lirmm
Pleading for open modular architectures - Lirmm

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
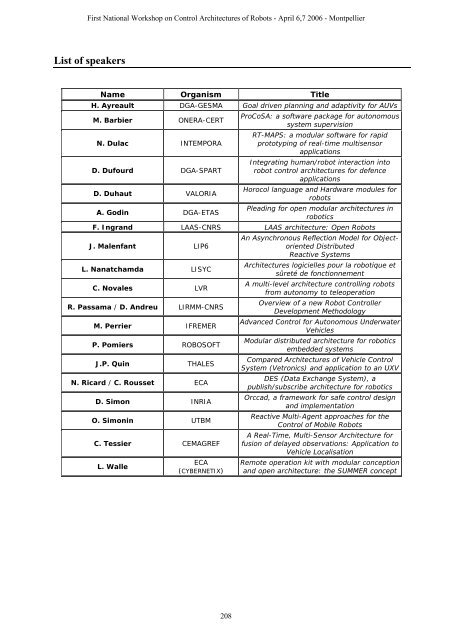
First National Workshop on Control Architectures of Robots - April 6,7 2006 - Montpellier<br />
List of speakers<br />
Name Organism Title<br />
H. Ayreault DGA-GESMA Goal driven planning and adaptivity <strong>for</strong> AUVs<br />
M. Barbier ONERA-CERT<br />
N. Dulac INTEMPORA<br />
D. Dufourd DGA-SPART<br />
D. Duhaut VALORIA<br />
A. Godin DGA-ETAS<br />
ProCoSA: a software package <strong>for</strong> autonomous<br />
system supervision<br />
RT-MAPS: a <strong>modular</strong> software <strong>for</strong> rapid<br />
prototyping of real-time multisensor<br />
applications<br />
Integrating human/robot interaction into<br />
robot control <strong>architectures</strong> <strong>for</strong> defence<br />
applications<br />
Horocol language and Hardware modules <strong>for</strong><br />
robots<br />
<strong>Pleading</strong> <strong>for</strong> <strong>open</strong> <strong>modular</strong> <strong>architectures</strong> in<br />
robotics<br />
F. Ingrand LAAS-CNRS LAAS architecture: Open Robots<br />
J. Malenfant LIP6<br />
L. Nanatchamda LISYC<br />
C. Novales LVR<br />
R. Passama / D. Andreu LIRMM-CNRS<br />
M. Perrier IFREMER<br />
P. Pomiers ROBOSOFT<br />
J.P. Quin THALES<br />
N. Ricard / C. Rousset ECA<br />
D. Simon INRIA<br />
O. Simonin UTBM<br />
C. Tessier CEMAGREF<br />
L. Walle<br />
ECA<br />
(CYBERNETIX)<br />
208<br />
An Asynchronous Reflection Model <strong>for</strong> Objectoriented<br />
Distributed<br />
Reactive Systems<br />
Architectures logicielles pour la robotique et<br />
sûreté de fonctionnement<br />
A multi-level architecture controlling robots<br />
from autonomy to teleoperation<br />
Overview of a new Robot Controller<br />
Development Methodology<br />
Advanced Control <strong>for</strong> Autonomous Underwater<br />
Vehicles<br />
Modular distributed architecture <strong>for</strong> robotics<br />
embedded systems<br />
Compared Architectures of Vehicle Control<br />
System (Vetronics) and application to an UXV<br />
DES (Data Exchange System), a<br />
publish/subscribe architecture <strong>for</strong> robotics<br />
Orccad, a framework <strong>for</strong> safe control design<br />
and implementation<br />
Reactive Multi-Agent approaches <strong>for</strong> the<br />
Control of Mobile Robots<br />
A Real-Time, Multi-Sensor Architecture <strong>for</strong><br />
fusion of delayed observations: Application to<br />
Vehicle Localisation<br />
Remote operation kit with <strong>modular</strong> conception<br />
and <strong>open</strong> architecture: the SUMMER concept














