'&(© § $#)0 213 2§ $'4 ¢¡¤£65 4y8 @ BA0£¦C#¡¤DE 2§6
'&(© § $#)0 213 2§ $'4 ¢¡¤£65 4y8 @ BA0£¦C#¡¤DE 2§6
'&(© § $#)0 213 2§ $'4 ¢¡¤£65 4y8 @ BA0£¦C#¡¤DE 2§6

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
! §"¢¡¤£¦¥¨§©§©§§$¡¤§/.0§¡¤1¢¡¤£<strong>$#</strong>"%'&(*)£¦+¡¤,-DEPARTAMENTO DE EXPLOTACIÓN Y PROSPECCIÓN DE MINASTESIS DOCTORALASPECTOS GRÁFICOSEN LAPREDICCIÓN DE SUBSIDENCIADIRECTORES:¢¡¤£$243&(*.0§1,-§5 ¢( "AUTOR:267/)§© ©"¡¤!( "OVIEDO 1995
8:9=@?@=A;CBEDFBE9G?AH=@IEn primer lugar, quisiera expresar mi más profunda gratitud a los Doctores:D. Celestino González Nicieza, D. Joaquín B. Ordieres Meré y D. Agustín MenéndezDíaz, sin cuya cooperación, apoyo y valiosa ayuda, no habría sido posible la realizaciónde este trabajo.A los miembros del Área de Seguridad Minera del Instituto TecnológicoGeominero de España, especialmente a D. Arturo Ochoa Bretón, por su inestimableayuda y colaboración.Para la realización de este trabajo se ha contado con los medios informáticos delServicio Común de Informática Gráfica perteneciente a la Universidad de Oviedo.
B?AHJ8:=AK@LA;>;>BEM@?NOQPSRUTWV XY-ZEn los últimos tiempos, las necesidades crecientes de mayores perforaciones ycavidades subterráneas, tanto en el ámbito minero como en el de la obra civil, hansupuesto un agravamiento del problema de los hundimientos de la superficie delterreno, lo que se traduce en un incremento de los posibles daños y, en general, de loscostes de perforación, si no se toman necesarias medidas de control.Como es bien sabido, el vacío creado por una gran extracción subterránea dematerial motiva el desplazamiento de la masa de roca situada en los alrededores de laperforación. Esto se traduce, inicialmente, en los problemas de sustentación de la propiaexcavación, interfiere luego con el resto de los trabajos de explotación y, por último, serefleja en la subsidencia de la superficie del terreno, fenómenos generalmenteindeseados. Esta deformación de la superficie puede producir daños en las estructuras(edificios, obras lineales e instalaciones en general) situadas sobre ella, que no estánpensadas en muchos casos para soportar estos efectos.Las medidas de control de este fenómeno pueden agruparse en tres etapas:- Predicción.- Prevención.- Protección.La eficacia de las medidas preventivas y protectoras depende en gran medida de laexactitud con que se realice la predicción y la determinación de los distintos parámetroso magnitudes que caracterizan la subsidencia, tales como el hundimiento, pendiente ycurvatura máximos de la cubeta de hundimiento y las tensiones de tracción ycompresión asociadas que permitirán evaluar los posibles daños causados en lasestructuras situadas en la superficie.En este trabajo se pretende analizar la problemática asociada a cada una de estasetapas, tanto desde el punto de vista formal como desde el punto de vista aplicado. Así,para el cálculo de todos los parámetros se ha desarrollado una metodología de trabajo,que permite realizar la primera etapa de predicción con la mayor fiabilidad posible,mediante la determinación de la cubeta de hundimiento producida por las laboressubterráneas. Se mejorará así la eficacia de las restantes medidas de control, facilitandoel diseño de las labores subterráneas, desde un punto de vista geométrico, con el fin dereducir sus efectos perjudiciales en las estructuras existentes en superficie (prevención).Por otro lado, la cuantificación de estos efectos define las características que han de3
eunir las nuevas estructuras que se ubiquen en la zona para que no se vean afectadaspor la deformación de la superficie (protección).[ R-TWY-\QY-]^Y-_a`cbA la par que se hace un estudio pormenorizado de las cuestiones relacionadas conlos parámetros que caracterizan el fenómeno de la subsidencia, se propone una solucióninformática de carácter general que resuelva estos problemas. Para ello se procederá a:1. Definir una estructura de datos consistente, basada en un modelo vectorial, para elalmacenamiento de la información geométrica, tanto del terreno como de laslabores subterráneas, así como de las distintas construcciones situadas en la zona aestudiar. Esta información se obtiene a partir de un proceso de digitalizaciónbasado en los correspondientes planos topográficos y de labores de la explotación.En esta etapa se incluye también toda la información gráfica que el usuarioconsidere oportuna con el fin de facilitar la interpretación de los resultados delproceso.2. Introducir una serie de generalizaciones en los principios básicos que conducirána un modelo más general del fenómeno de la subsidencia3. Proponer una estrategía automática de correción de parámetros mediante unproceso de optimización basado en técnicas de inteligencia artificial.4. Desarrollar el programa informático encargado de la realización de los cálculos apartir de la información recogida en la primera etapa. Este estará compuestobásicamente por tres módulos: el primero de ellos encargado de la generación delos modelos digitales del terreno y de las labores, el segundo dedicado al procesode integración discreta sobre los modelos anteriores de las funciones de influenciapropuestas y, el tercero, encargado de la generación de todos los resultadosgráficos necesarios para la correcta interpretación del fenómeno estudiado.5. Evaluar las posibilidades presentes y futuras de esta tecnología, planteandomejoras al modelo desarrollado en este trabajo y despejando posibles vías deinvestigación. Se determinará el equipo informático con las prestacionesnecesarias para afrontar el análisis de información geométrica y se darán lasclaves para valorar el coste de una instalación de estas características.6. Analizar el fenómeno mediante el uso de un programa comercial, basado en elmétodo de los elementos finitos, especialmente diseñado para el tratamiento deproblemas geomecánicos con el fin de comprobar la fiabilidad del modelopropuesto y de los parámetros escogidos para el desarrollo del programa4
informático. Para ello se empleará una serie de casos sencillos que servirán decontraste de la estrategia propuesta.d ]ebgf
m ?AK@B;>9on@9
s tvu4wxyzu4y [>{ h y}|~w {vCAPÍTULO I: ESTADO DEL ARTE E INTRODUCCIÓN .....................................................14ESTADO DEL ARTE...................................................................................................................16PRINCIPIOS BÁSICOS DE LAS FUNCIONES DE INFLUENCIA .............................................36Principio de simetría rotacional ................................................................................................36Principio del ángulo límite........................................................................................................37Principio de equivalencia..........................................................................................................39Principio de superposición ........................................................................................................40Principio de reciprocidad ..........................................................................................................40Principio de la constancia del volumen .....................................................................................41Principio de transitividad ..........................................................................................................41Implementación analítica..........................................................................................................43CAPÍTULO II: PROPUESTA DE MODELIZACIÓN DE LA SUBSIDENCIA .......................47MODELO PROPUESTO ..............................................................................................................48Modificaciones en la estructura de la Función de Influencia propuesta .....................................60IMPORTANCIA DEL FACTOR TIEMPO ...................................................................................63Métodos Propuestos..................................................................................................................65Relaciones Subsidencia-Tiempo ...............................................................................................65Fases de la Subsidencia.............................................................................................................69CAPÍTULO III: ESTIMACIÓN PARAMÉTRICABASADA EN TÉCNICAS DE INTELIGENCIA ARTIFICIAL ......................71EL PROBLEMA DE LA OPTIMIZACIÓN ..................................................................................72INTRODUCCIÓN A LOS ALGORITMOS EVOLUTIVOS..........................................................77IMPLEMENTACIÓN DEL ALGORITMO EVOLUTIVO............................................................79Algoritmo Genético ..................................................................................................................79Estrategia Evolutiva..................................................................................................................90COMPROBACIÓN ANALÍTICA .................................................................................................98APLICACIÓN PRÁCTICA......................................................................................................... 119OTRAS APLICACIONES........................................................................................................... 123CAPÍTULO IV:IMPLEMENTACIÓN INFORMÁTICA DE LAS HERRAMIENTASPARA LA PREDICCIÓN DE LA SUBSIDENCIA......................................... 124Módulo DIGSUB ........................................................................................................................ 129Módulo PARSUB........................................................................................................................ 134Módulo CALSUB ....................................................................................................................... 137Módulo GENRES........................................................................................................................ 139APLICACIÓN PRÁCTICA DEL PROGRAMA SUBSID ........................................................... 153CAPÍTULO V: CONCLUSIONES Y PERSPECTIVAS DE FUTURO................................... 163CONCLUSIONES....................................................................................................................... 164PERSPECTIVAS DE FUTURO..................................................................................................1657
ANEXO.......................................................................................................................................... 166ALGORITMOS GENÉTICOS (AG) ........................................................................................... 167PROGRAMACIÓN EVOLUTIVA (PE)...................................................................................... 170ESTRATEGIA EVOLUTIVA (EE)............................................................................................. 173SISTEMAS CLASIFICADORES (SC)........................................................................................ 177Reglas Internas ....................................................................................................................... 178PROGRAMACIÓN GENÉTICA (PG) ........................................................................................ 181CRITERIOS DE DAÑO.............................................................................................................. 182Criterios de daño propuestos................................................................................................... 184LISTADOS ................................................................................................................................. 187BIBLIOGRAFÍA ........................................................................................................................... 1888
s tvu4wxyzu4yz€ w‚ƒ-| {vSubsidencia sobre una explotación minera (después de Goldreich).............................................1-17Área de influencia......................................................................................................................2-18Zona de influencia .....................................................................................................................3-18Esquema de una explotación tabular ..........................................................................................4-27Función de influencia con distribución normal (1; después de Whittaker, 1989) ydistribución no normal (2; después de Liao, 1993) .....................................................................5-32Método de los rayos proyectivos ................................................................................................6-34Cubeta elemental creado por la extracción de un elemento dA...................................................7-36Principio del ángulo límite .........................................................................................................8-37Influencia del elemento extraído en los horizontes H 1y H 2........................................................9-38Principio de equivalencia .........................................................................................................10-39Principio de reciprocidad .........................................................................................................11-41Evolución temporal de la presión en los estratos ......................................................................12-42Modelos teóricos empleados para caracterizar los parámetros a, k y n......................................13-49Cubetas de hundimiento para el modelo 1 en función de a .......................................................14-51Cubetas de hundimiento para el modelo 1 en función de k .......................................................15-52Cubetas de hundimiento para el modelo 1 en función de n .......................................................16-53Cubetas de hundimiento para el modelo 2 en función de a .......................................................17-54Cubetas de hundimiento para el modelo 2 en función de k .......................................................18-55Cubetas de hundimiento para el modelo 2 en función de n .......................................................19-56Cubetas de hundimiento para el modelo 3 en función de a .......................................................20-57Cubetas de hundimiento para el modelo 3 en función de k .......................................................21-58Cubetas de hundimiento para el modelo 3 en función de n .......................................................22-59Valores característicos del parámetro a ....................................................................................23-61Geometría del área explotada con un único frente ....................................................................24-66Traslación del área de explotación ...........................................................................................25-68Desarrollo temporal de la subsidencia en una explotación hipotética por tajo largo..................26-69Creación de la población reproductiva en un AG canónico.......................................................27-81Ejemplo de Cruce Simple.........................................................................................................28-81Ejemplo de Cruce Doble ..........................................................................................................29-82Cruce Multipunto.....................................................................................................................30-82Datos que componen las peticiones al programa gserver ..........................................................31-87Diagrama del proceso distribuido de evaluación de cromosomas..............................................32-88Efectos de mutaciones simples (izquierda) y mutaciones correladas (derecha) .........................33-94Modelo I evaluado con el programa COSMOS/M ....................................................................34-99Modelo II evaluado con el programa COSMOS/M.................................................................35-100Modelo III evaluado con el programa COSMOS/M................................................................36-1009
Mallado del Modelo I generado con GEOSTAR.....................................................................37-102Mallado del Modelo II generado con GEOSTAR ...................................................................38-102Mallado del Modelo III generado con GEOSTAR..................................................................39-103Hundimiento del terreno en el modelo I .................................................................................40-103Hundimiento del terreno en el modelo II................................................................................41-104Hundimiento del terreno en el modelo III...............................................................................42-104Comparación de resultados para el modelo I con 3 parámetros...............................................43-105Comparación de resultados para el modelo II con 3 parámetros .............................................44-106Comparación de resultados para el modelo III con 3 parámetros ............................................45-106Comparación de resultados para el modelo I con 4 parámetros...............................................46-107Comparación de resultados para el modelo II con 4 parámetros .............................................47-107Comparación de resultados para el modelo III con 4 parámetros ............................................48-108Comparación de resultados para el modelo II con 5 parámetros .............................................49-109Comparación de resultados para el modelo III con 5 parámetros ............................................50-110Error Total a lo largo de la variedad unidimensional P-Q.......................................................51-111Error Total a lo largo de la variedad unidimensional P-R .......................................................52-112Error Total a lo largo de la variedad unidimensional Q-R.......................................................53-112Error Total a lo largo de la variedad bidimensional PQR........................................................54-113Líneas de Isovalores del Error en la variedad bidimensional PQR ..........................................55-113Comparación de desplazamientos horizontales para el modelo I.............................................56-114Comparación de desplazamientos horizontales para el modelo II ...........................................57-114Comparación de desplazamientos horizontales para el modelo III..........................................58-115Comparación de pendientes para el modelo I .........................................................................59-115Comparación de pendientes para el modelo II ........................................................................60-116Comparación de pendientes para el modelo III.......................................................................61-116Desplazamientos estimados para el modelo I..........................................................................62-117Desplazamientos estimados para el modelo II ........................................................................63-117Desplazamientos estimados para el modelo III.......................................................................64-118Puntos de control del problema evaluado ...............................................................................65-121Modelo digital de las zonas explotadas...................................................................................66-121Módulos que constituyen la implementación informática .......................................................67-125Información digitalizada en la primera fase............................................................................68-126Perspectiva de la información ................................................................................................69-127Ángulos límites α y β.............................................................................................................70-128Menú de selección de parámetros de las zonas explotadas......................................................71-130Identificación de los puntos de la retícula...............................................................................72-132Interpolación de cota en puntos de la retícula.........................................................................73-132Modelo digital (derecha) de una superficie definida por sus líneas de nivel (izquierda)..........74-133Esquema de las diferentes etapas del módulo PARSUB .........................................................75-13410
Tira de 32 bits para la representación de un número entero ....................................................76-134Ejemplo de cromosoma compuesto por seis parámetros .........................................................77-135Proceso de cruce de una pareja de cromosomas......................................................................78-135Esquema de las diferentes etapas del módulo CALSUB .........................................................79-137Proceso de obtención de las pendientes, deformaciones horizontales unitarias y curvaturas....80-138Esquema de las diferentes etapas del módulo GENRES.........................................................81-140Proceso de obtención de un segmento de isolínea...................................................................82-141Isolíneas de hundimiento........................................................................................................83-142Isolíneas de desplazamientos horizontales..............................................................................84-143Isolíneas de desplazamientos horizontales según el eje OX ....................................................85-144Isolíneas de desplazamientos horizontales según el eje OY ....................................................86-145Isolíneas de Pendientes...........................................................................................................87-146Isolíneas de Deformaciones Unitarias.....................................................................................88-147Isolíneas de Curvatura............................................................................................................89-148Corte A-A' con las curvas de cada uno de los siete parámetros estudiados..............................90-149Sombreados de los distintos tipos de construcciones...............................................................91-151Zona con hundimientos inferiores a 150 mm..........................................................................92-151Zona con desplazamientos horizontales inferiores a 30 mm ...................................................93-152Zona con deformaciones unitarias horizontales de compresión...............................................94-152Información gráfica de partida ...............................................................................................95-153Isolíneas de Hundimiento con 3 parámetros ...........................................................................96-154Isolíneas de Desplazamiento Horizontal con 3 parámetros .....................................................97-155Isolíneas de Pendientes con 3 parámetros...............................................................................98-155Isolíneas de Deformación Unitaria con 3 parámetros..............................................................99-156Isolíneas de Curvatura con 3 parámetros .............................................................................. 100-156Isolíneas de Hundimiento con 5x2 parámetros...................................................................... 101-157Isolíneas de Desplazamiento Horizontal con 5x2 parámetros................................................ 102-158Isolíneas de Pendientes con 5x2 parámetros ......................................................................... 103-158Isolíneas de Deformación Unitaria con 5x2 parámetros........................................................ 104-159Isolíneas de Curvatura con 5x2 parámetros .......................................................................... 105-159Isolíneas de Hundimiento con 5x2x4 parámetros..................................................................106-160Isolíneas de Desplazamiento Horizontal con 5x2x4 parámetros............................................ 107-161Isolíneas de Pendientes con 5x2x4 parámetros ..................................................................... 108-161Isolíneas de Deformación Unitaria con 5x2x4 parámetros .................................................... 109-162Isolíneas de Curvatura con 5x2x4 parámetros....................................................................... 110-16211
s tvu4wxyzu4y h {v„†…‡{ˆTiempos comparativos de ejecución del programa SubGa..........................................................1-89Módulos del programa COSMOS/M ..........................................................................................2-98Errores totales empleando la función de influencia con 3 y 4 parámetros .................................3-108Errores máximos empleando la función de influencia con 3 y 4 parámetros .............................4-108Errores totales empleando la función de influencia con 5 parámetros.......................................5-109Errores máximos empleando la función de influencia con 5 parámetros...................................6-109Mejoras porcentuales conseguidas según el número de parámetros...........................................7-110Óptimos obtenidos para el modelo III.......................................................................................8-111Coeficiente corrector de la pendiente para cada modelo...........................................................9-116Errores totales obtenidos con los modelos de función de influencia propuestos ......................10-122Nombre y contenido de los Layers empleados por SUBSID ...................................................11-131Categorías de Edificios Propuestas.........................................................................................12-184Parámetros de la Subsidencia .................................................................................................13-185Valores Máximos de los Parámetros.......................................................................................14-186Criterios de Daño en Estructuras: Límites de los parámetros ..................................................15-18612
s tvu4wxyzu4y … w h { u N Pseudo código genérico de un Algoritmo Evolutivo ...................................................................1-77Fichero de opciones del programa SubGa ..................................................................................2-84Fichero de datos con los mallados de la explotación...................................................................3-84Fichero de datos con los puntos de control .................................................................................4-85Rutina principal del programa SubGa ........................................................................................5-86Fichero de identificación del programa gserver ..........................................................................6-88Fichero de preferencias del programa SubEE.............................................................................7-95Rutina principal del programa SubEE........................................................................................8-96Fichero de control del programa GEOSTAR ............................................................................9-101Fichero de puntos de control ..................................................................................................10-119Fichero de celdas ...................................................................................................................11-120Hundimiento estimado en cada hito con 5x2x4 parámetros ....................................................12-122Pseudo código de la etapa de integración del módulo CALSUB .............................................13-137Fichero de opciones del programa SUBCRI ...........................................................................14-151Resultados numéricos con 3 parámetros .................................................................................15-154Resultados numéricos con 5x2 parámetros .............................................................................16-157Resultados numéricos con 5x2x4 parámetros .........................................................................17-160Pseudo código genérico de un Algoritmo Genético ................................................................18-169Pseudo código genérico de una Programación Evolutiva........................................................19-172Pseudo código genérico de una Estrategia Evolutiva ..............................................................20-174Pseudo código de un Sistema Clasificador Sin Aprendizaje....................................................21-180Pseudo código de un Sistema Clasificador Con Aprendizaje ..................................................22-18013
;Jp:‰ m HJL@qJ=BaŠ9GI6H6prK@=KA9Gq‹p:8rHJ9o9ŒB?AHJ8r=@KAL@;>;>BEM@?
En este capítulo se presenta una perspectiva histórica, por orden cronológico, delas aportaciones realizadas por múltiples investigadores al estudio de la subsidencia. Ala vista de la bibliografía recopilada y de acuerdo con los objetivos establecidos paraeste trabajo, las principales líneas de investigación presentadas son tres:- Métodos Empíricos: Se basan en la experiencia obtenida a partir de un grannúmero de medidas sobre el terreno.- Funciones de Influencia: Estos métodos hacen uso de diferentes tipos defunciones para reflejar la influencia en superficie de las labores subterráneas.- Modelos Teóricos: Son de naturaleza analítica y están basados en laspropiedades reológicas de los materiales sometidos a la subsidencia.Por último, se presenta en detalle la línea de investigación escogida y losprincipios básicos que la rigen.15
y h { u Nu4y … { | h yEl fenómeno de subsidencia de la superficie terrestre ha sido reconocido enEuropa desde principios del siglo XV, debido particularmente a los daños producidos enlas estructuras asentadas en las zonas afectadas por explotaciones mineras, y quemotivaron gran número de litigios que exigían la presencia de una opinión experta.Aparentemente, ya entonces, los procesos judiciales eran una gran motivación para larealización de estudios.Los primeros intentos para analizar sistemáticamente los mecanismos asociadoscon la subsidencia, fundamentalmente de origen minero, datan del año 1800,centrándose en la realización de numerosos estudios de campo con el fin de cuantificarlos desplazamientos superficiales causados por la minería.En la bibliografía, la primera fórmula relacionada con este fenómeno fuepropuesta por Dumont en 1871 y permite obtener el hundimiento w generado sobre elcentro de un panel de carbón explotado:w= m cosα (1)donde m es la potencia de la capa y α es el ángulo de inclinación del estrato(Kratzsch [66]). Según esto, la subsidencia generada por una capa horizontal (α ≈ 0)sería igual a su potencia.Por otro lado, la fórmula:w= a m z(2)utilizada alrededor de 1895 para la determinación del daño proporcional producido pordos explotaciones vecinas, tenía ya en cuenta, mediante los factores empíricos a y z, elmétodo de extracción y la edad de las labores. Más tarde, la cantidad de carbón extraídose relacionó con la magnitud del hundimiento en superficie, y se introdujo laprofundidad de la explotación como parámetro, así como un coeficiente deesponjamiento que valoraba el aumento de volumen de los estratos afectados por estefenómeno (Goldreich [1]).16
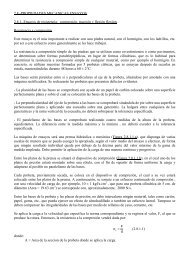
DesplazamientosCompresiónTracciónŽ Ž Ž Ž Ž Ž Ž ŽŽ Ž ŽŽ Ž Ž Ž Ž Ž Ž ŽŽ Ž ŽŽ Ž Ž Ž Ž Ž Ž ŽŽ Ž ŽŽ Ž Ž Ž Ž Ž Ž ŽŽ Ž ŽŽ Ž Ž Ž Ž Ž Ž ŽŽ Ž ŽγTerciarioCarboníferoγMj‘’”“”•e–~—˜ šj›œ“””ž‘ Ÿ” ”¡¢£‘–~ž¤””•¥ ~“”¡”–~ c¦j§”¨¤ª©l–¢£‘«”¡~¬‘ ¡” •e–~®¥Ÿ” ”ž§”“”¯”ž$Ÿ” ~°$¤”¨Ÿ”•¥ ”‘ ¢±”²En 1899, la investigación de la subsidencia minera recibió un fuerte impulso conla creación en la cuenca del Ruhr de la Emschergenossenschaft, una asociación dedicadaal drenaje en el distrito minero situado en los alrededores del río Emscher, un afluentedel Rhin. Para asegurar un encauzamiento seguro de las aguas, se llevaron a caboobservaciones regulares de la superficie del terreno y se instituyeron los cálculos paraprever la subsidencia. Como resultado de estas observaciones se concluyó que el área dela zona de extracción estaba relacionada con un valor reducido de la potencia de la capa,que era tenido en cuenta mediante la relación existente entre el área de extracción y elárea de influencia presentado en la figura 2.Sin embargo, los desplazamientos horizontales no empiezan a considerarse hasta1900, después de observar los cambios sufridos por las cimentaciones de los edificios, ylas tensiones de tracción y compresión aparecidas en las vías de tren situadas en la zonaafectada. Desde esa fecha, las teorías han avanzado en un intento de explicar elmecanismo por el cual los movimientos del terreno se transmiten desde la zona deexcavación hasta la superficie a través de los distintos materiales que componen elsustrato de la zona afectada (Shadbolt [62]).La necesidad de controlar tales movimientos ha estimulado un extenso estudiomultidisciplinar de la predicción de los desplazamientos del terreno y de lacorrespondiente subsidencia ocasionada en superficie.La curiosidad por los efectos en profundidad de las perforaciones mineras aparecemás tarde. El principal motivo de esta atención fue, el vertiginoso aumento del estallidode las rocas (rockburst) en la minería metálica (Cook [35]). Posteriormente, el rápidocrecimiento del interés por la minería de tajo largo consolidó y diversificó el estudio deotros efectos en profundidad de las labores subterráneas.La investigación de los fenómenos superficiales y profundos se llevó a cabovirtualmente por separado, aunque es difícil entender hoy cuál fue la razón de esta falta17
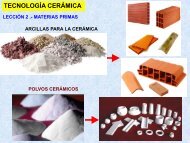
de coordinación. Mientras los investigadores persistieron en su empeño de trabajaraisladamente sus progresos fueron, necesariamente, reducidos.Los ingenieros relacionados con la minería de carbón consiguieron, sin embargo,avances interesantes. A principios de la década de los 1950 el concepto de área deinfluencia era ampliamente aceptado. Para precisar esta idea, examínese un caso muysencillo, suponiendo que, en la zona de interés, tanto la capa de carbón como lasuperficie son horizontales. Según este concepto un punto P de la superficie se veinfluido únicamente por la zona minada en el interior de un cono circular recto, cuyoeje es vertical y su vértice es el punto P. El ángulo en el vértice γ se denomina ángulode derrumbe, ángulo límite o ángulo de influencia.³‘’”“”•¥–~´”˜ š£µ$•¥ ”–~Ÿ ~‘¡ª·l¨ “” ”¡”¢‘ –Una generalización obvia del concepto de área de influencia consiste en construirla envolvente de todos los conos de derrumbe, es decir, una superficie apoyada en ellímite de la explotación y que forme un ángulo con la vertical igual al ángulo dederrumbe. La curva que resulta de la intersección de esta superficie con el terrenodelimita la llamada zona de influencia de las labores subterráneas. Sólo los puntos delterreno situados en el interior de esa región se verán afectados por las labores.³‘’”“”•¥–~¸”˜ šj¹³¤”¡”–~Ÿ” †‘¡ª·l¨ “” ”¡”¢‘ –Aunque este concepto es teóricamente cuestionable, el concepto de área deinfluencia se ha mostrado como un método muy útil a la hora de calcular losdesplazamientos de los puntos de la superficie. La sugerencia comúnmente hecha deque la envolvente descrita anteriormente contiene todos los desplazamientos inducidosen cualquier horizonte por las labores subterráneas es claramente irreal. Sólo en el casode minas poco profundas, donde las roturas del techo de las labores se transmiten18
ºdirectamente a la superficie, se pueden despreciar los desplazamientos originados en elexterior de dicha región por ser mucho más pequeños que los ocasionados en suinterior.El objetivo de los primeros investigadores era determinar y luego predecir losperfiles de las distribuciones de los desplazamientos horizontales u y verticales w sobrelabores de forma rectangular. Las observaciones realizadas han permitido establecertambién la forma general de las curvas que definen las cubetas de pendiente T y dedeformación horizontal plana ε.Los procedimientos empleados en la búsqueda de métodos para la predicción de lasubsidencia incluyen el modelado físico a escala de laboratorio (King [6]), el ajusteempírico de curvas (Marr [16]), la representación adimensional de las observaciones decampo (NCB [38]) y el desarrollo del método de la zona de cálculo, que luego daríalugar al método de la función de influencia.En 1925, Keinhorst (Keinhorst [2]) propuso que los desplazamientos verticales enun punto P de la superficie podían ser estimados a partir de la siguiente expresión:( )( 0. 66i0.34o)( )( 0. 66 0.34 )w = −κmτt ⋅ e + ⋅ e == −s τ t ⋅ e + ⋅em i odonde, m es la potencia de la capa, sm(3)= κ m es la máxima subsidencia que puede darseen el punto P una vez extraída toda el área de influencia y el tiempo transcurrido desdela finalización de la explotación, t, ha sido el suficiente para permitir el completodesarrollo de los desplazamientos. Además, τ( t ) es el factor de tiempo, cuya forma más−genérica es: τ( t) e ct τ( t) τ( )= 1− ; 0 < ≤ ∞ = 1, siendo c un coeficiente temporaldeterminado empíricamente. Por otro lado, e iy e oson los ratios que denotan laproporción de área extraída frente a la total en la zona interior (inside) y exterior(outside) de influencia, respectivamente. Con este método, denominado de integraciónpor recintos, se tenía en cuenta por primera vez, que la subsidencia no sólo depende deltamaño del área extraída sino también de la posición relativa de los puntos de lasuperficie respecto a las labores.Esta aproximación fue bastante popular e hizo que durante las siguientes décadasfueran propuestas nuevas aproximaciones, en la misma dirección, por Bals (Bals [3]) yotros (Schleier [7]). Este proceso de mejora del planteamiento inicial de Keinhorst haconducido, según la terminología moderna, al denominado método de la función deinfluencia. Así, en 1931 Kolmogoroff (Jarosz [107]) propone una nueva relación entreel tiempo y la subsidencia :( ) V w ( x)w t= ⋅ ′ (4)19
»¼donde( )w t( )w t= ∂ ∂tes la velocidad de subsidencia( )∂w xw′ ( t)=∂xV = Cambio en el origenPor otro lado, Bals introdujo en 1932 varias zonas de explotación con sus propiosratios individuales y puede ser considerado como el primer investigador que empleó elmétodo de la función de influencia.En 1940, Aviershin (Jarosz [107]) introduce una nueva expresión para lavelocidad de subsidencia:( ) exp( )w t = a bt c(5)donde a, b y c son parámetros empíricos.En 1942, Adamek y Jeran en su método de precálculo (Adamek [77]) tambiéncomprobaron la necesidad de introducir el concepto de coeficiente de subsidenciavariable. En virtud de la variabilidad de las características de los materiales situados porencima del panel explotado, ellos opinaban que no se podía suponer constante elcoeficiente de subsidencia a lo largo de todo el panel. Desafortunadamente, los autoresdefinieron el coeficiente de subsidencia variable, κ i, en un punto P i, debido a un áreaminada A, de forma que no puede ser justificado desde un punto de vista físico. Ellospropusieron, en términos de la convención de signos y notaciones empleadas aquí, queκ iwi= −m eidonde w ies la subsidencia medida en P i, m es la potencia de la capa y e i, que no debeconfundirse con el anterior, es ahora el coeficiente de eficiencia. En términos de lo vistopreviamente para el método de la función de influencia, e ies la subsidencia en P iinducida por la extracción de un panel de potencia unitaria sobre el área A. En otraspalabras, el coeficiente de subsidencia variable no es más que la relación entre lasubsidencia normalizada en P iy la subsidencia predicha por el método de la función deinfluencia en el mismo punto para un valor unitario del hundimiento máximo, s m= 1 .Después de la Segunda Guerra Mundial los métodos estocásticos(Litwiniszyn [11]), el uso de computadoras para la obtención de curvas de perfil(6)20
¿(Niederhofer [25]) y la aplicación del método de los elementos finitos dieron un nuevoimpulso al estudio del fenómeno de la subsidencia.En 1947, se produjo una importante aportación para la obtención de la ley detracciones por Aviershin (Love [5]), que relacionaba la distribución de desplazamientosverticales y horizontales. Esta aproximación llegó a ser muy popular entre otrosinvestigadores (Salamon [26], King [6], Wardell [17]):¾ ½ ∂wu x′ , y′ = K *(7)∂x′donde u es el desplazamiento horizontal del punto estudiadoEl factor de proporcionalidad, K *, es una constante que tiene unidades delongitud. El razonamiento físico empleado para proponer la relación recogida en laecuación 7 no está claro. Quizás se basó simplemente en las observaciones de campoque indicaban que la forma de las curvas de desplazamientos horizontales y tensiones seasemejaba bastante a la de las curvas de pendientes y curvaturas respectivamente. Unrazonamiento alternativo es que el investigador supuso que el recubrimiento de la zonaexplotada estaba sometido a un plegamiento. En una memoria publicada en 1705, JamesBernoulli ya sugería que la resistencia de una varilla doblada era debida a la extensión ycontracción de sus fibras longitudinales y que dicha resistencia era proporcional a lacurvatura de la varilla (Love [5]). Como la curvatura causada por la subsidencia espequeña, puede ser aproximada en un plano vertical paralelo al eje x por la segundaderivada de w respecto a x. Por tanto, la hipótesis de Bernoulli conduce a la siguienterelación entre la deformación horizontal, ε x, y la curvatura:εx2∂u∂ w= = K *(8)2∂x∂xque es matemáticamente idéntica a la dada en la ecuación 7.En 1948, Perz (Jarosz [107]) define el valor de la subsidencia en función deltiempo como:∫x = vttw( t) = z( t) w′( x)d x0 (9)donde z( t ) es una función de tiempo. Poco después, en 1951 Salustowicz propone unanueva expresión de la velocidad de subsidencia, suponiendo constante la subsidenciafinal w f :[ ]f( ) = − ( )w t c w w tdonde c es un coeficiente de tiempo.(10)21
ÀPor su parte, Knothe (Jarosz [107]) retoma esta expresión en 1953 y supone queel valor de la subsidencia final varía con el tiempo, expresando la ecuación anterior dela forma:[ ]f( ) = ( ) − ( )w t c w t w t(11)Otra relación entre la distribución de desplazamientos verticales y horizontales,quizás menos conocida que la sugerida por Aviershin, parece haber sido propuesta porMartos (Martos [13]) que, basándose en unas detalladas observaciones realizadas en1955 en las cuencas mineras húngaras, observó que el vector desplazamiento de unpunto situado en la superficie tendía a apuntar hacia el centro de gravedad o centroidede la zona minada. Cuando el área explotada es pequeña esta observación conduce a unaútil relación:uwr= (12)Hdonde H es la profundidad constante de la capa explotada y r es la distancia del puntode la superficie al elemento extraído.Por lo que se refiere al estudio de las acciones de las explotaciones mineras sobrelas construcciones situadas en superficie, Luetkens fue el primero en iniciar estostrabajos en 1957 para, poco más tarde, publicar directrices a seguir en el caso de que sedeseasen proteger edificios situados en zonas mineras (Luetkens [12]).Hasta aquí, los ratios de extracción se habían obtenido de forma experimental omediante el uso de algún método gráfico de integración. En 1961, Maassen se planteapor primera vez el cálculo analítico de los distintos parámetros incluidos en la funciónde influencia (Kratzsch [66]). Para ello se apoyó en la siguiente función de influencia:2 2x + y−22 kd w = ce d x d y(13)donde dw es el desplazamiento vertical diferencial generado en un punto P(0,0) por unelemento extraído dxdy, siendo c y k los parámetros que se tratan de determinar. Paraellos obtuvo los siguientes valores:amHc = ; k = 0,329522πktan γdonde am es la subsidencia crítica 1 y γ es el ángulo límite.(14)1 En la bibliografía estudiada, cuando se realiza un estudio bidimensional de la subsidencia, sedemonima área crítica de extracción a la anchura del taller que produce el hundimiento máximo en unsolo punto de la superficie, que sufre el mayor desplazamiento vertical posible, denominadosubsidencia crítica o total. Cuando la longitud del taller es menor o mayor que la crítica, el área deextracción de denomina subcrítica o supercrítica, respectivamente.22
ÊÊÊÄÄÊQuizás, el mejor resumen del método de la función de influencia fue realizado en1963 por Daunesse y Rambaud (Daunesse [27]). Ellos definieron dos funciones, quecorrespondían a los desplazamientos verticales, F( x′ ), y horizontales ( )G x′ que sepresentan en un problema bidimensional. De nuevo, se suponía que la estratificación erahorizontal y asumían que se había explotado una capa de potencia m para todos lospuntos con x0. Ellos proponían quela subsidencia vertical, w, y los desplazamientos horizontales, u, estaban dados por:u x′ = u G x′w xdonde s = mm κ, u mmÁàÁŒÂÁàÁà(15)′ = − s F x′mes el máximo desplazamiento horizontal y x ′ =x H . Aquí lasfunciones F( x′ ) y G( x′ ) son consideradas como las funciones de perfil. Los autoresestablecieron también que, en general para el caso tridimensional, los desplazamientospodían ser expresados en términos de las siguientes integrales:u x′ , y′ = u g ρ d A*Å Æ ÅÇÆm A *w x′ , y′ = −s f ρ d A*Å Æ ÅÇÆm A *donde ρ = r H . Obviamente, aquí la función f( ρ ) y la empleada en la ecuación 19 sonidénticas, suponiendo que A* = A H2 y τ = 1.(16)Las funciones f( ρ ) y g ρ son denominadas funciones de influencia, y estánÈ
propusieron que el desplazamiento vertical en un punto P, con una estratificaciónhorizontal, podía ser expresado como sigue:( t)mκ τw( x, y)= − f( r H)d dH∫ ξ η2(19)A2 2 2donde r = ( x − ξ) + ( y − η ) , H es la profundidad de la explotación, ( )f r H es lafunción de influencia y A es el área extraída. Además x, y son las coordenadas de P,mientras que ξ, η son variables auxiliares. Es fácil establecer una relación directa entreel estimador de la ecuación 19 y el correspondiente al método de la zona de cálculo dela ecuación 3.Póngase el origen de ambos sistemas de coordenadas en el punto P (es decir, x=0e y=0), siendo R ny R n−1el radio interior y exterior respectivamente de la n-sima zonay denotando por k nel peso de la misma. Tomando derivadas y haciendo uso decoordenadas polares:Rn′( ) ( )nk = ρf ρ d ρ dθ = 2 π ρfρ d ρ(20)n∫2π0∫R′Rn′−1 Rn′−1Aquí, se han introducido la notación Rn′ = Rn H . Usando los pesos k ny los ratiosde extracción en, n = 1 Ò ,2, N , la subsidencia en el punto P viene dada por:∫( ) = − κ τ( )w P m t k eN∑n=1nn(21)donde, N es el número de zonas empleadas. Se postula que cuando τ = 1, la subsidenciaes w P = mκ = s msi todos los e n= 1. Entonces,ÓÕÔN∑ k n=n=11 (22)Por lo tanto, la función de influencia debe verificar el siguiente criterio:tan α2π ρf ρ ÖÇ× ∑ dρ= 1(23)0Por lo que se refiere a los métodos basados en modelos teóricos, estos pretendenpredecir el comportamiento del macizo rocoso situado sobre las labores a partir de leyesmecánicas o estadísticas, con el fin de determinar el desplazamiento producido en lasuperficie. A lo largo de esta década, se proponen diferentes tipos de comportamientosdel macizo rocoso: elástico, plástico, sin cohesión o incluso estocástico, que componende forma homogénea los estratos afectados por la subsidencia. Así, Gil propone en 1966un modelo compuesto por dos zonas, la primera constituida por un medio estocástico24
situado inmediatamente encima de la explotación y una zona superior elástica(Kratzsch [66]). También, en 1966 Cernyi propone un modelo plástico, donde sólo esjustificable calcular los desplazamientos finales de la superficie de un semiplanovertical (Cernyi [34])Por otro lado, se plantea en 1967 la posibilidad de analizar el fenómeno desubsidencia global del macizo rocoso a partir del comportamiento de elementosindividuales del mismo (Zienkiewicz y Cheung [41]) o elementos finitos.De los estudios de la subsidencia alrededor de los años 60 puede concluirse conun par de observaciones. En primer lugar, el avance en el entendimiento del fenómenofue suficiente para formular e implementar con considerable éxito un buen número demedidas para combatir el daño producido por la subsidencia. Estas medidas incluyen(1) el uso del relleno para reducir la magnitud de los efectos en superficie, (2) el empleode métodos de explotación armónicos, donde la geometría de la explotación sedistribuía para superponer deformaciones o pendientes de sentidos opuestos, en unintento de contrarrestar unas con otras y conseguir unas deformaciones y pendientesresultantes nulas o lo más pequeñas posibles y (3) la práctica de la explotación parcialpor tajo largo para reducir los efectos en superficie consiguiendo, a pesar de ello, unosporcentajes de explotación razonablemente altos (NCB [21]).En segundo lugar, los principios subyacentes detrás de estos métodos de controlhan permanecido intactos frente al paso del tiempo. Todos ellos, especialmente losbasados en las explotaciones parciales por tajo largo, se siguen empleando en laactualidad.Existe, sin embargo, una falta de discusión en la vasta bibliografía relacionadacon el fenómeno de subsidencia sobre los supuestos básicos que constituyen el métodode la función de influencia. Estos no son triviales e incluyen (1) la aceptación de losmodelos lineales que describen la deformación de las masas rocosas, (2) el supuesto deque el comportamiento de las masas rocosas es invariante respecto a la rotaciónalrededor de un eje vertical (las capas, superficies y estratificación se suponenhorizontales), y (3) el reconocimiento de dos únicos estados para cualquier porción dela capa, explotada o no explotada.La primera suposición no fue nunca propuesta explícitamente, sino que surgió deluso del principio de superposición. La consecuencia del último supuesto es que tanpronto como una porción de la capa es extraída, se espera de ella que aporte la totalidadde su influencia a la subsidencia de la superficie. Como se verá más tarde, esta premisacae rápidamente en desuso con la introducción del factor tiempo en los distintosmétodos predictivos. De estos, el método de la función de influencia es el que mejoracepta esta modificación25
Se sugiere, aparentemente por vez primera en 1961 (Salamon [22]), que eldesplazamiento y las tensiones inducidas por la explotación de un cuerpo mineralizadotabular o una capa pueden ser predichas a partir de la distribución de la convergencia odesplazamiento relativo entre las partes superior e inferior de la explotación,independientemente de la complejidad de las labores. Esta generalización representauna relación crítica entre el pasado y los nuevos métodos de predicción delcomportamiento del terreno.Es una relación con el pasado porque representa una lógica generalización delmétodo de la función de influencia. Introduce la noción de que la contribución de unapequeña parte de la capa al desplazamiento de un punto cualquiera de la masa rocosa noes del tipo todo/nada, sino que es proporcional a la magnitud de la convergenciareinante en cualquier momento. Esta formulación elimina inmediatamente un númerode incongruencias aparecidas cuando se empleaba el método de la función de influenciaen la predicción de la subsidencia del terreno. Así, este planteamiento conduce a unvalor de la subsidencia sobre el borde de un panel ancho que es menor de la mitad delmáximo desplazamiento posible. El método de la función de influencia siempre da eneste punto un valor del 50% de la subsidencia máxima (Salamon [22]).El método que hace uso de la distribución de la convergencia está relacionadotambién con los nuevos desarrollos, porque es una extensión lógica del trabajo deHackett (Hackett [15]), Berry (Berry [18]) y Sales (Sales [19]). Estos investigadoresiniciaron la aplicación de modelos elásticos en la predicción de los movimientos delterreno. Una faceta importante de esta iniciativa fue la idea, aparentemente propuestapor Hill, de representar las explotaciones tabulares como discontinuidades de losdesplazamientos en la capa (Hackett [15]).En la mitad de la década de los años 70, (Salamon [54]) realizó un estudiobastante general del problema planteado por las explotaciones de forma tabular, dondela altura de la explotación es pequeña en comparación con su largo y ancho. Supóngaseque el techo y el muro de una pequeña región de la capa de área ∆A han sidodesplazados uno respecto al otro. Si el origen del sistema de coordenadas se sitúa en lacapa y el eje positivo x 3 apunta hacia el techo, las componentes del vectordesplazamiento relativo están definidas por:+ −s = u − u i = 1, 2,3i i idonde u i + y u i − representan el desplazamiento del techo y del muro respectivamente.(24)26
âãj‘’”“”•¥–~Ø”˜ šjÙÚžÛ”“” ”¬~–~Ÿ” ~“”¡”–~ ª¦Ü§”¨¤ª©l–”¢£‘«”¡E©l–””“”¨–”•Las componentes del vector s paralelas a la capa son las componentes decabalgamiento y la componente perpendicular a la capa es la convergencia propiamentedicha. Si la situación de ∆A en la capa está definida por ( ξ ξ )punto P situado en ( x1 x2 x3), , es:, , el desplazamiento del1 2k∆u P = s ξ , ξ U x − ξ , x − ξ , x ∆A(25)i k 1 2 i 1 1 2 2 3ÝßÞ à á à ágà ákdonde, U irepresenta los desplazamientos inducidos por volúmenes unitarios dedesplazamientos puntuales.En lo que sigue los argumentos de s i, U iy aquellos de cualquier otra función seomitirán, si no es necesaria su presencia, para evitar ambigüedades. También se haráuso de la notación tensorial para mayor brevedad 2 .El desplazamiento total en el punto P puede ahora expresarse como:u Pk= ç s U d ξ1 d ξ2 (26)i k iAäæådonde A es el área explotada.Teniendo en cuenta la ecuación 25 y las relaciones usuales entre las componentesde desplazamiento y deformación, las deformaciones infinitesimales en P debidas a unárea elemental son:é 1è 1 ékèk∆ε ij= ∆u i , j+ ∆u j , i= s kU i , j+ Uj,i∆A(27)22Si la conocida ley de Hooke se expresa:τij= cεlmij lm(28)2 Por tanto, los subíndices y superíndices repetidos hacen referencia a un sumatorio y las comasseguidas de un subíndice, por ejemplo, j, hacen referencia a la diferenciación respecto a x j . Esto suponeque la ecuacion 19 define nueve ecuaciones U ik.27
ílas tensiones en P debidas al área elemental extraída pueden ser expresadas de lasiguiente forma:donde las funciones Γ ij kk k( l m m l )1lmk∆τ ij= s kc ijU + U ∆A = skΓij∆A(29), ,2son las funciones de influencia para la tensión. Las tensiones enP pueden ser obtenidas ahora mediante la integración:kτ P = s ì Γ d ξ 1d ξ 2(30)ik k ijAêÕëEs necesario destacar en este punto que en las ecuaciones 18 a 24 losdesplazamientos, deformaciones y tensiones son las componentes inducidas por laextracción del área A.La aplicación práctica de estos resultados formales exige la solución de dosproblemas básicos. Primero, es necesario obtener las funciones U i k , que se determinanusualmente de forma analítica. Las condiciones de contorno escogidas son s i= 0 fuerade las áreas elementales, desplazamientos nulos en el infinito y esfuerzos nulos en lasuperficie del terreno. La ventaja de este conjunto de condiciones de contorno es suinherente adaptabilidad para la superposición. Las funciones de desplazamientoselementales han sido obtenidas para un número variado de modelos elásticos. Estosincluyen los modelos laminares sin fricción (Salamon [22,26,28]), modelos multimembrana(Salamon [26,28]), modelos homogéneos isotrópicos (Salamon [26,28,31])y modelos homogéneos transversalmente isotrópicos (Salamon [28]).El segundo problema fundamental supone la determinación de las componentes deconvergencia y cabalgamiento. Esto se consigue con la ayuda de la ecuación 30.Trabajando formalmente sólo con excavaciones tabulares abiertas, es obvio que el( vesfuerzo de tracción inducido en este caso es igual a −T ) i, esto es, el vector de sentidoopuesto al vector original de esfuerzos. Por tanto, la condición de contorno adopta laforma (Cook [35], Salamon [54,32]):( v) ( v)k− T = = lim s Γ d A(31)iτi3x3→0Aki3que, en general, representa un sistema de tres ecuaciones integrales para la distribucións k.En la práctica, las ecuaciones integrales recogidas en la ecuación 31 son resueltasnuméricamente mediante la sustitución de las integrales por sumatorios. Esto se lleva acabo subdividiendo A en n áreas elementales y calculando luego la fuerza según la28
ïdirección i en el elemento k, inducida por el volumen unidad de desplazamientosrelativos según la dirección j en el elemento l. Este proceso conduce a las relaciones:Tki= −γskl lij j⎧i, j = 1,2,3⎨(32) k, î l = 1,2,ndonde el signo negativo surge de la convención de signos empleada, que suponepositivas la convergencia y las tensiones de compresión, y que la fuerza normal detracción inducida origina convergencia.Teniendo en cuenta el teorema de reciprocidad y que la energía de deformación espositiva, la matriz γ ijkl(Salamon [46,54]).de la ecuación anterior es simétrica y definida positivaUna serie intensiva de investigaciones de campo llevadas a cabo en África del Suren los años 60 han demostrado que la teoría elástica, contrariamente a lo esperado pormuchos, puede describir cuantitativamente el comportamiento de las masas rocosastanto en minería metálica a grandes profundidades como en minería de carbón, siempreque las deformaciones sean pequeñas (Salamon [48], Oravecz [52]).Todos estos apartados han sido confirmados por varios investigadores(Karmis [74], Steed [81]), incluso (Jones [79]) empleando funciones de influenciahiperbólicas ha obtenido resultados más precisos que los obtenidos con el método de loselementos finitos.En los últimos años se ha hecho evidente que los modelos funcionales son los quepermiten de una forma más realista y fiable la predicción de la subsidencia. No sólopermiten el tratamiento de explotaciones con geometrías complejas, sino que permitenla inclusión en el estudio del factor tiempo. En este último caso, los distintos factorespropuestos por los investigadores son idénticos al propuesto originalmente porKeinhorst, con pequeñas diferencias. Así, en 1972 Trojanowski introduce un nuevofactor de tiempo en este modelo, quedando de la forma:[ ]f( ) = ( ) ( ) − ( )w t c t w t w tSin embargo, (Sroka [63], Schober [89]) haciendo uso del método de la funciónde influencia propuesto por Knothe, consiguió determinar una solución específica en eltiempo para un panel rectangular con avance en uno de sus lados. La fórmula propuestapor este investigador es:∆M t⎡⎢⎣( ) = a∆V1+ ( −ct) − ( −ξt)− −(33)ξc ⎤exp expc ξ c ξ⎥(34)⎦29
donde ∆M( t ) es la variación de la subsidencia en un determinado instante t, a es elcoeficiente de subsidencia, ∆V es el volumen elemental extraído, c el factor de tiempoy ξ es el factor de compactación temporal.Por lo que refiere a los estudios de subsidencia realizados en nuestro país, el máscompleto, donde se recogen los distintos métodos vistos anteriormente y su aplicación acasos concretos en las cuencas mineras españolas es el publicado por el InstitutoTecnológico Geominero de España (Ramírez [86]). En este estudio, se propone que lascurvas de influencia presentes en la bibliografía pueden representarse de forma generalpor funciones exponenciales como:⎛−Cw = C ⋅⎜⎛ 2⎝e ⎜ ⎞2 ⎠1+ n ⋅ e⎜⎝⎞⎟ − ⎛ 2⎝ ⎜ ⎞π ρ π ρ ⎟C3⎠ ⎟⎟⎠(35)El valor de w en la función de influencia es el hundimiento creado en superficiepor una unidad de área infinitesimal explotada, ρ es la distancia horizontal, C 1 es unaconstante definida por las condiciones geométricas, C 2 y C 3 son funciones de laprofundidad y caracterizan la disminución del hundimiento a medida que el puntoestudiado se aleja del volumen extraído; pueden interpretarse como integrales de laspropiedades mecánicas de los estratos situados entre el nivel de la explotación y lasuperficie.Parece ser que las relaciones lineales de la forma C 2 =kh y C 3 =2kh son losuficientemente aproximadas para la mayoría de los tipos de funciones de influenciaestudiadas, aunque no existe una información tal que permita una aceptación definitiva.Por lo tanto, la ecuación anterior queda de la forma:⎛ −w = C ⋅ ⎛ ⎝e ⎜ ⎞⎜kh ⎠1+ n⋅e⎝2⎟ − ⎛ 2π ρ ⎝ ⎜ ρπ⎞⎟2kh⎠donde k y n son parámetros independientes.⎞⎟⎠(36)El factor C 1 depende de la extensión lateral de la cubeta de hundimiento, estoconduce y lleva al problema de la incidencia del ángulo límite. Un ángulo límite, comose ha visto, puede definirse por el punto de hundimiento cero si existe una transicióndesde la zona de hundimiento a la de elevaciones verticales en los extremos de la cubetade subsidencia. Es posible que tal elevación ocurra siempre, pero por lo general es deuna magnitud muy reducida para poder ser detectada fácilmente. La existencia deelevaciones del terreno viene expresada por valores negativos de n ( −1 ≤ n ≤ 0 ) en laecuación anterior. A una distancia finita R (radio crítico de extracción), w toma un30
valor nulo y puede decirse que la relación R h es la cotangente del ángulo límite. Así,la constante C 1 queda definida por la condición geométrica:wmax= 2π∫ρw d r0R(37)Existen ahora dos alternativas: la primera posibilidad hace referencia a laecuación 35, considerándola válida para valores positivos de w, esto es, en el intervalo0 ≤ ρ ≤ R , siendo w = 0 para ρ > R. En este caso, el ángulo límite es, al menosmatemáticamente, independiente de la geometría de las labores y de la potencia de lacapa. La segunda posibilidad incluye valores negativos de w. Esto conduce a cubetas dehundimiento con pequeñas elevaciones fuera del área de subsidencia, pero la posicióndel punto de hundimiento nulo varía con la geometría del área de explotación.Finalmente, cabe indicar que las condiciones límite son diferentes cuando seasume que el hundimiento nulo ocurre sólo en el infinito. Este supuesto es inherente atodas las teorías convencionales presentadas.Las funciones de influencia pueden ser expresadas, entonces, para la ecuación 35con n ≥ 0 de la siguiente forma:w =wmax( 1 + 4n)( kh)2⎛ −kh⋅ ⎛ ⎝e⎜ ⎞⎠⎜+ n ⋅e⎝2⎟ − ⎛ 2π ρ ⎝ ⎜ ρπ⎞⎟2kh⎠donde los parámetros k y n caracterizan las condiciones de los estratos y lasformaciones geológicas.La inclusión de funciones complementarias completa la caracterización de losdiferentes parámetros que definen este fenómeno. Así, (Sutherland [67] yMunsion [91]) han incorporado la influencia de las zonas minadas y no minadas a lapredicción de la subsidencia, lo que es especialmente útil en las explotaciones porcámaras y pilares. Ellos han sugerido también la inclusión de formulaciones que tenganen cuenta el comportamiento de los materiales afectados, así como sus propiedadesgeológicas. (Tandanand y Powell [68]) han intentando evaluar el efecto de ladistribución litológica de las rocas duras y blandas, pero todavía es necesario ahondaren este planteamiento.Otro factor corrector ha sido propuesto por (Heasley y Saperstein [78]), queincluyen en su modelo el efecto de borde en la zona próxima al punto de inflexión de lacubeta de hundimiento. Una medida similar fue sugerida por (Ren, Reddish yWhittaker [88]) basándose en la experiencia de la NCB (National Coal Board). Por suparte, (Hellewell [95]) ha introducido una fórmula empírica para tener en cuenta lasfallas geológicas, recomendando un estudio más detallado del problema.⎞⎟⎠(38)31
El avance más reciente dentro del ámbito de los métodos funcionales, se debe aLiao que propone el uso de funciones de influencia difusas (fuzzy), que tengan encuenta el efecto de las masas rocosas situadas en los bordes del panel explotado(Liao [127]). Frente a las funciones tradicionales, este tipo de funciones varía su formay el valor de los parámetros, según la posición del punto del terreno evaluado y laposición del elemento de volumen extraído, como se observa en la figura 5.ø³ðjó”ù”ú£ñû”ù~ü”ý~ñ ùªþlÿó”ý”ù”ú£ñõ~ú¡ ”ù~ü”ñ¢¤£lôeñ¥”ó”ú£ñû”ù~ù¦”ô¨§~õ”ÿ©¨¦”ü”ý¦¢”󦦢ü”ý”ñ££lõ¦ý”ô¨¦¦¦¦¦¡ü”ñ¢£lô¥ñ ¥”ó”úñû”ù~ù ~ù¦ ”ô§~õ”ÿ¡©¦ðjñò”ó”ôeõ~ö÷¦¦¦¦! ¦ü”ý¦¢”󦦢$ü”ý”ñõ¦La fórmula propuesta por Liao, para la función de peso difusa en un problemaplano, es:2( − ) + ( − )2 22⎡ ⎛ k P + k X ⎞⎤⎡⎛ k P L k X L ⎞⎤1 212fw ( P)= ⎢1 − exp⎜−π ⎟⎥⎢1− exp⎜−π 22⎟⎥(39)⎣ ⎝ R ⎠⎦⎣⎝R ⎠⎦Por lo tanto, la función de influencia y la subsidencia quedan de la forma:21F ( P) ( )R f P ⎡ P − Xw=w−⎛⎜⎞ ⎤exp⎢π ⎟⎣⎝ R ⎠ ⎥(40)⎦L1 ⎡ P Xw( X) = −ag fw( P)−⎛ −⎜⎞⎤⎟ PR∫ exp⎣⎢π⎝ L ⎠⎦⎥d (41)0donde k 1 es el coeficiente de influencia de la masa rocosa alrededor de los extremos delpanel; k 2 es el coeficiente de posición del punto de la superficie considerado; L es lalongitud del panel; R es el radio de influencia principal; a es el factor de subsidencia; yg es la potencia extraída. Este método supone una considerable mejora en la precisiónde los resultados obtenidos, tanto para los desplazamientos verticales como para loshorizontales.En cuanto a los modelos teóricos, el método de los elementos finitos sigue siendoel más empleado, aunque se ha comprobado que los modelos sencillos son incapaces de32
simular el complejo funcionamiento de los estratos afectados por la subsidencia, comopudieron comprobar (Dahl y Choi [50]) durante un estudio realizado en Pennsylvania,en el que comparaban las medidas de campo con las obtenidas con un modelotridimensional elasto-plástico. Así, Jones y Kohli (Jones y Kohli [79]) usando estemétodo han conseguido obtener perfiles de subsidencia con diferencias próximas al15% de las medidas reales. Por otro lado, Siriwardane (Siriwardane [80]) usando unaidealización bidimensional y unidimensional del comportamiento de las explotacionesde tajo largo, concluyó que estos métodos son incapaces de predecir adecuadamente lasubsidencia siendo necesarias mejoras significativas. Este mismo investigador obtuvoposteriormente mejores resultados empleando el método de los desplazamientosdiscontinuos (Siriwardane [98]). Resultados similares han sido obtenidos en China por(Sugawara et al [82]). Las discrepancias, en este último caso, fueron atribuidas a laimposibilidad de tener en cuenta el comportamiento reológico y las fracturas de losniveles de rocas situados por encima de las labores.Dahl y Choi, sugirieron también que la resistencia y el módulo de elasticidad deuna gran parte de los materiales del Carbonífero y las rocas subyacentes deberíanreducirse drásticamente, con el fin de tener en cuenta las juntas que existen in situ entales materiales, que luego no aparecen en las muestras empleadas en los laboratoriospara la medición de estos parámetros. Ya que esta reducción es arbitraria y, en ciertosentido, manipuladora con el objetivo de obtener resultados parecidos a los valoresmedidos, su campo de aplicación está claramente limitado.Por otro lado, (Coulthard y Dutton [92]) han empleado los métodos de loselementos continuos y elementos discontinuos para el análisis de las tensiones asociadasa la subsidencia, comprobando que las cubetas obtenidas de esta forma sonsensiblemente menos profundas que las reales. De nuevo, se atribuyó está diferencia a laelección arbitraria de las propiedades de los materiales y las diaclasas de la zonaafectada.Algunos investigadores han empleado el método de los elementos de contorno enproblemas bidimensionales y tridimensionales (Lavie y Denekamp [76], McNabb [87]),y sugieren, como conclusión, que el coeficiente de Poisson (0,25) disminuye con laprofundidad, teniendo valores mayores a profundidades más pequeñas. Otros, hanutilizado de forma conjunta el método de los elementos de contorno y un mediolaminado para crear un modelo numérico tridimensional, cuyos resultados han sidorazonablemente precisos (Salamon [123]). Posteriormente, este modelo ha sidomejorado para tener en cuenta de forma simultánea no sólo la subsidencia sino tambiénla inestabilidad de las labores incluyendo la interacción entre el techo y el suelo a travésde los pilares de protección (Yang [129]).33
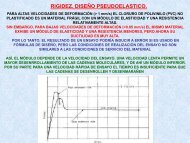
Más recientemente, se han implementado nuevos tipos de elementos concomportamientos no lineales, que han permitido mejorar las predicciones (Pariseau yDuan [102]). Estos investigadores, para posibilitar la comparación de los resultadosnuméricos con las medidas de campo, multiplicaron por un factor corrector el módulode elasticidad de los materiales medido en el laboratorio. Sin embargo, no existe unateoría general aceptable que permita elegir correctamente estos factores de escala.Dentro de este mismo campo, (Najjar [128]) ha propuesto un modelobidimensional mejorado basado el método de los elementos finitos no linealesiterativos-incrementales. Este modelo destaca por describir de forma precisa elcomportamiento no lineal de los estratos afectados y simular acertadamente lassecuencias de extracción. También, (Yao [131]) ha introducido modificaciones en unmodelo creado en la Universidad de Nottingham, basado en un medio transversalmenteisotrópico (Whittaker [105]), para tener en cuenta la inclinación de las capas en lapredicción de la subsidencia producida por ellas. Por otro lado, (Shu [124]) haestudiado la influencia de la inclinación del terreno sobre la subsidencia mediante lacomparación de un modelo bidimensional basado en los elementos finitos con losresultados obtenidos con un modelo plano, aplicando sobre él la teoría de rayosproyectivos presentada en la figura 6, que consiste en la proyección de la subsidencia alo largo de una superficie horizontal equivalente sobre el terreno inclinado.ðjñò”ó”ôeõ#"÷ ø%$&£' ”ü¦ ~ü”ý~ÿ ¦¢$ôeõ&( ¦¢)”ô¨ *jý”ú¤£lñ+( ¦¢Otro modelo de gran interés es el propuesto por (Hao [118]) que generaliza lateoría de difusión y migración de huecos para obtener una ecuación diferencial decarácter tridimensional, que puede ser resuelta mediante la definición de variascaracterísticas del macizo rocoso. Así, en una explotación por cámaras y pilares, Haosupone que las características de los estratos afectados por las labores subterráneas novarían ni antes ni después de la explotación. Por lo tanto, es factible suponer que el34
coeficiente de difusión de huecos y el factor de convección son constantes en un planohorizontal lo que permite resolver la ecuación diferencial. Por otro lado, en lasexplotaciones por tajo largo los efectos de la fracturación de los estratos afectandecisivamente al fenómeno de la subsidencia, por lo que Hao propone un modelobidimensional sencillo que tiene en cuenta las diferencias de fracturación existentesentre las zonas minadas y las no minadas.Por su parte, (Bravo [111]) ha realizado modificaciones en un modelotridimensional basado en el método de las diferencias finitas, con el fin de tener encuenta el flujo de agua en el área cercana a Houston (USA). Las condiciones decontorno para el flujo de agua fueron estimadas a partir de la ley de Darcy.Desde este mismo punto de vista hidrogeológico, (Rivera [112]) ha propuesto unmodelo no lineal para simular el flujo de agua y la subsidencia total producida en unmedio multiestrato, para ello acopla la solución numérica de la ecuación del flujosubterráneo con la ecuación de consolidación unidimensional basada en el concepto depresión efectiva.Como resultado de esta recopilación bibliográfica, se puede concluir que elmétodo de las funciones de influencia contiene una cierta racionalización de losmecanismos involucrados en el fenómeno de la subsidencia y es el único método capazde ser generalizado con el fin de predecir los desplazamientos originados por unaslabores de geometría genérica. Este tipo de labores con geometrías complejas, fallas,fracturas, dislocaciones, etc. son difíciles de modelar mediante el método de loselementos finitos debido a la necesidad de incluir numerosos parámetros físicos que enla mayoría de los casos es imposible cuantificar. Sin embargo, las funciones deinfluencia recogen globalmente todos estos factores facilitando su aplicación.A la vista de esto, este trabajo va a profundizar en la idea de la predicción de lasubsidencia basada en el método de la función de influencia. Este método se analizaráen detalle a continuación, para recoger en el capítulo segundo las diferentes mejoraspropuestas en este trabajo.35
,-#./102.,3.46587:915;.0248@BA158CEDF/10G.¤4;58=?>8./1CE@BDF>;/10G.¤ATeniendo en cuenta las investigaciones realizadas, se deduce que el método de lafunción de influencia es el más realista y fiable para la predicción de la subsidencia. Nosólo permite el tratamiento de geometrías complejas, sino también la inclusión delfactor tiempo.Como se ha visto, las funciones de influencia describen el efecto k zejercido en lasuperficie por los elementos infinitesimales que constituyen el área de extracción. Elelemento dA de una explotación, situado a una profundidad H, da lugar a la formaciónen el terreno de una pequeña cubeta (cubeta elemental), cuyo punto más profundo estásituado en la vertical del elemento extraído y cuyo margen está definido por el ángulolímite γ. El valor de la subsidencia de un punto P, que se mueve radialmente dentro dela cubeta, puede expresarse como una función del ángulo ζ o de la distancia radial rdesde el centro de la cubeta o de la distancia oblicua f desde el elemento extraído.ðjñ ò”óôeõ#H÷ ø%I 󦥔ý&£lõ~ý”ÿý¦§~ý”ù&£lõ”ÿ£úôeý”õ”ü¦ #¦ ”ô³ÿõ~ý&J¡£lô¥õ”ú£úñ û”ù~ü”ý~ó”ù~ý”ÿý¦§~ý”ù&£' ~ü!KEste método está basado en siete hipótesis básicas, que simplifican el proceso decálculo y lo hacen universalmente aplicable (Kratzsch [66]). Estos principios sepresentan a continuación:Principio de simetría rotacionalLa influencia producida por la extracción de un volumen elemental de material,para cualquier ángulo ζ, puede suponerse idéntica en todas las direcciones horizontales,asumiendo que la masa rocosa afectada presenta una estratificación horizontal, tiene uncomportamiento isotrópico y no presenta fallas o discontinuidades.36
La cubeta elemental producida, definida horizontalmente por un círculo, puede sergenerada mediante la rotación de cualquiera de sus perfiles transversales o sucorrespondiente función k z.De igual forma, todos los elementos situados en la misma dirección ζ desde elpunto P de la superficie, tiene en todas las direcciones horizontales una mismainfluencia sobre el punto P.Principio del ángulo límiteEste principio supone que el ancho de la cubeta de hundimiento sobre las laboresestá limitado por sendas líneas rectas trazadas desde el extremo de la zona extraída, queforman un ángulo constante γ con la vertical, denominado ángulo límite, que esindependiente de la profundidad y el tamaño de la explotación.Por tanto, esta relación entre el área de las labores y la cubeta se puede aplicar aun punto P de la superficie y un volumen elemental de la explotación dA como seobserva en la figura 8. Así, las áreas extraídas A 1y A 2, que influyen de igual forma enel punto P de la superficie, aumentan de tamaño linealmente con la profundidad de laslabores H 1y H 2, siempre dentro del cono de influencia definido por el ángulo límite.ð³ñò”ó”ô¥õ#”÷ ø%Lœôeñ ù”úñ ”ñ ~üý”ÿ¡M”ù”ò”ó”ÿ ~ÿ N §~ñ£lýMientras tanto, las cubetas de hundimiento B 1y B 2producidas por la extracciónde un elemento de volumen dA crecen, manteniendo su volumen constante, en funciónde la profundidad, de tal forma que A 1es igual que B 1y A 2igual que B 2.Teniendo en cuenta que el ángulo en el vértice del cono de influencia esindependiente de la profundidad del elemento, se puede afirmar que la influencia dedicho elemento se manifiesta siguiendo la ley de proyección central recogida en lafigura 9.37
H 1H 2ð³ñò”ó”ô¥õ#”÷ ø%O ùªþlÿó”ýù”úñ õ~ü”ý”ÿýÿý¦§~ý”ù&£' †ý&J£lôeõ¦N ü¦ ~ý”ù†ÿ ¦¢P¦ ”ô¥ñ Q ”ùR£lý¦¢Como cualquier fuerza o radiación que emana desde un punto central (porejemplo, la intensidad lumínica), la influencia debida a la extracción de un elemento devolumen en una zona de área constante dentro de los límites del cono de influencia esinversamente proporcional al cuadrado de la distancia. Esto es aplicable a cualquiercono individual con un ángulo ϕ en el vértice. Así, las influencias k z1y k z2por cm 2 enlas áreas A 1y A 2a las distancias H 1y H 2verifican la relación:kkz1z2A1= =A2ff2221(42)Esta ley de radiación, con1 1 1 1= =f r + H H r1+ ⎛ ⎝ ⎜ ⎞⎟H ⎠2 2 2 2 2puede escribirse de la siguiente forma:1⎛k ( r)H g ⎡ rz= + ⎛ ⎝ ⎜ ⎞ ⎤⎢ ⎟2 ⎜ 1⎣ H ⎠⎥⎝ ⎦2 −1⎞⎟⎠(43)(44)38
donde g es una función que liga la disminución de la influencia k zcon el ángulo ζdentro del cono de influencia 3 .Principio de equivalenciaTodos los volúmenes elementales dA extraídos a una misma profundidad H 1oH 2tienen el mismo cono de influencia y, también, las mismas funciones de influencia.Por tanto, todos los elementos que componen la capa tienen una influencia equivalenteen la superficie.ðjñò”ó”ô¥õ#¦S”÷ øTLœôeñù”ú£ñ”ñ ~ü”ý~ý¦U”ó”ñ+Üõ”ÿ ý”ù”úñõDado un ángulo direccional ζ, que es el ángulo que forma la línea que une elelemento extraído y P con la vertical, la influencia en esa dirección k z( ζ ) es la mismapara todos los elementos. Por ejemplo, como se observa en la figura 10, la influencia delos elementos 1 y 1’ situados a una profundidad H 1y H 2, respectivamente, sobre unpunto P de la superficie es idéntica, ya que el ángulo de dirección de P es el mismo. Lomismo ocurre con 2-2’, 3-3’ y 4-4’. Dentro del cono ϕ, cuyo vértice es el punto P, lasáreas explotadas A 1, A 2,... influyen de la misma forma sobre P, ya que aumentan detamaño con el cuadrado de su distancia, f al punto P.3 Por ejemplo, kz ( r) = ( − r H )(Ehrhardt y Sauer [20])39exp λ 2 2 después de (Neuhaus [56]), con λ H 2 = 0, 5 despúes de
Principio de superposiciónCon el fin de simplificar el estudio del fenómeno de subsidencia, se supone quecada elemento extraído dentro del cono límite de un determinado punto P de lasuperficie, influye sobre este último sin verse afectado por los elementos vecinos. Así,la influencia individual k zien el punto P, debida a cada uno de los elementos quecomponen la zona explotada, se superponen unos a otros para producir la subsidenciafinal.Esto es válido, también, para los casos en que la capa presenta varias áreasexplotadas o existen varias capas. La cubeta de hundimiento se calcula de formaindividual para cada uno de los paneles explotados, sumándose para obtener la cubetacombinada.Principio de reciprocidadDe los principios mencionados hasta aquí se deduce que es lo mismo calcular deforma individual la subsidencia final de cada uno de los puntos de la superficie, quedeterminar primero cada una de la cubetas elementales generadas en toda la superficiepor cada uno de los elementos extraídos, y combinarlas para obtener la cubetadefinitiva.Por tanto, en una representación bidimensional, como la reflejada en la figura 11,el perfil de una cubeta elemental (1) es la imagen especular de la función de influencia(3). Los elementos dA , dA , , V dAde la zona explotada actúan sobre el punto P de la1 2 5superficie con los valores k , k , W , k de acuerdo con la función de influencia k ( P)1 2 5mostrada en la parte inferior de la figura 12. Según el principio de equivalencia detodos los elementos de la capa, el elemento central dA 3ejerce la misma influenciak , k , X , k en los puntos e, d, P, c y b, respectivamente, que los elementos1 2 5dA , dA , , Y dAsobre el punto P.1 2 5z40
ð³ñò”ó”ô¥õ#!”÷ ø%Lœô¥ñù”ú£ñ”ñ ~ü”ý~ô¥ý”úñ ô¨ ”úñü”õ”üLa cubeta elemental debida a dA 3, se obtiene restando a los puntos de lasuperficie el valor:k′ = wimáxkik3(45)Los puntos a y f por estar situados en el límite del cono de influencia del elementodA 3no se ven afectados por la extracción de este.Principio de la constancia del volumenComo se ha visto hasta ahora (ecuación 3), tanto la subsidencia como el resto delos parámetros de la cubeta están relacionados linealmente con la potencia de la capa my con un factor κ que depende básicamente del método de explotación. Además, elvolumen de la cubeta de hundimiento generado en la superficie ha de ser igual alvolumen de la convergencia de las labores.Principio de transitividadEste principio estipula que la cubeta debida a un área de extracción crítica debepoder obtenerse a partir de las cubetas generadas por áreas más pequeñas, o subcríticas;y recíprocamente, las cubetas debidas a una área de extracción subcrítica deben poderobtenerse a partir de la cubeta generada por una área crítica, por la misma ley.En la práctica, estos siete principios no son totalmente correctos. Por ejemplo, lasáreas críticas que afectan al punto P están limitadas, de acuerdo con las últimas41
observaciones realizadas, no por líneas rectas sino por curvas (Szpetkowski [55]) segúnla expresión:R = c H(46)que corresponde a funciones de influencia de la forma (Neuhaus [58]):k ( r)z=1H g ⎛⎜r ⎞⎟⎝ H⎠(47)Por otro lado, el principio de equivalencia ignora el hecho de que la convergenciadel elemento extraído depende de la convergencia en los elementos vecinos y tambiénde la potencia de la zona explotada, ya que la presión vertical aumenta hacia el centrodel taller y también con el área de la zona de extracción, como se observa en lasiguiente figura.ðjñò”ó”ôeõ#!”÷ øTZ[+( ”ÿó”ú£ñû”ù£lý¦§#¦ ”ôeõ”ÿü”ý~ÿ õ#”ô¥ý¢ñû”ù~ý”ù~ÿ ¦¢$ý¦¢£lô¥õ&£' ¦¢En esta figura se representan tres fases de la explotación de un taller: las fases 1 y 2corresponden al avance del frente, lo que se traduce en una rápida variación delocalización e intensidad de la presión. Mientras, que la fase 3 corresponde al estado deequilibrio temporal que se alcanza transcurridos varios años después la finalización dela explotación del taller.El comportamiento parcialmente plástico de la roca fisurada conduce, aún enestratificaciones horizontales, a cubetas asimétricas dependiendo de la dirección delavance y de las direcciones de las distintas familias de fisuras. Tampoco el principio desuperposición se verifica en la realidad. Sobre la línea que divide dos talleres explotadasuno a continuación del otro se crea, al contrario de lo supuesto por este principio, unaelevación residual del terreno. Incluso en un medio elástico isotrópico, la explotación deuna segunda capa, de igual potencia que la primera, no da lugar a una cubeta de dobleprofundidad, como se puede comprobar fácilmente mediante la aplicación del métodode los elementos finitos.42
El principio de constancia de volumen ignora el hecho de que el aumento devolumen debido a la expansión vertical del material situado sobre la explotación, puedeser mayor que la reducción de volumen debida a la compresión del mismo sobre la zonano explotada aún. Incluso, la redisposición de los bloques de estratos afectados por lasubsidencia puede originar una cubeta de mayor volumen que el de la convergencia delas labores.A pesar de todas estas contradicciones, el método de las funciones de influenciaha demostrado su utilidad en la práctica. Con ciertas suposiciones adicionales estemétodo, que está basado fundamentalmente en la linealidad del comportamiento de losmateriales afectados por la subsidencia, puede ser adaptado al comportamiento no linealde la masa de roca fisurada.Implementación analíticaTodos estos principios se traducen de forma analítica en lo siguiente. Para serconsistente con la presentación realizada en el estado del arte, se aceptará de nuevo quela estratificación, incluyendo la capa y la superficie del terreno, es horizontal y que elcomportamiento de la masa rocosa es invariante respecto a una rotación alrededor de uneje vertical. Bajo estas circunstancias las componentes de cabalgamiento del vector dedesplazamiento relativo de techo y muro son despreciables, es decir, s1 = s2 = 0 . Laúnica componente no nula de este vector es la convergencia, es decir, s3 = s = 0 . En loque sigue se omitirá el subíndice 3 para mayor brevedad y el origen del sistema decoordenadas x, y, z se sitúa en la superficie con el eje z apuntando hacia abajo. Portanto, el pequeño desplazamiento horizontal radial, ∆u r, y el vertical, ∆w , inducidos enun punto P( x, y,0 ) por la extracción del material correspondiente a un elemento de áreacentrado en ξ, η están dados por:∆uP∆w Ps= gπ ρ ρ 2s= − f ρπr \^] _ `\^] _ `2∆A*∆ A *donde las notaciones son las mismas que las empleadas anteriormente, peroconsiderando que las funciones f y g son funciones de las potencias pares de ρ. Laobtención de las componentes rectangulares de ∆u res sencilla(48)∆u P∆v Ps x g2= ′ − ξ′ρπ∆ A *s= y ′ − ′ g2η ρπ∆ A *a^b c dfe gahb a bfe g(49)Estas expresiones permiten calcular los desplazamientos totales en P:43
~€iiqy…j k l m¡l mon p12u x′ , y′ = s ξ′ , η′ x′ − ξ′g ρ d A*π A*m j j l kfn pk 12v x′ , y′ = s ξ′ , η′ y′ − η′g ρ d A*π A*1 2r s t uwv xw x′ , y′ = − s ξ′ , η′f ρ d A*π A*(50)(51)Estos resultados son directamente comparables con los obtenidos en la ecuación16. La mayor disparidad entre los dos conjuntos de integrales radica en la diferenciaentre los integrandos. En la primera, las funciones de influencia son integradasdirectamente sobre el área explotada. En las ecuaciones 38 y 39 las funciones deinfluencia son primero ponderadas con el valor de la convergencia y luego integradassobre A. La otra diferencia está relacionada con los argumentos de las funciones deinfluencia, pero esta se discutirá de una forma más apropiada junto con las componentesde la deformación.De las ecuaciones 38 y 39 se pueden obtener por derivación paramétrica ladeformación, ε xx, la distorsión, ε xy, y la pendiente, T x 4 :εξεTxxxyxyx= ∂uξ η ρ ξ ρ∂x = 1πH s ′ ′ g 2 + x′ − ′ 22 g′2, d A *A1 ∂u∂u= +2 ∂x∂y∫‚„ƒ* z { | } z { | } (52)22( ξ η )( ξ )( η ) ( ρ )(53)= πH s ′ , ′ x′ − ′ y′ − ′ g′d A *A* (54)∂w2= = −x H s ′ ′ x ′ − ′ f 2ξ , η ξ ′ ρ d∂ πA *A* † ‡¡† ‡ ˆ ‰ (55)Las componentes ε yyy T ypueden ser obtenidas a partir de las ecuaciones 40 y 43,respectivamente, reemplazando ( x′ − ξ ′)por ( ′ − ′)y η .Si se supone que la convergencia es uniforme a lo largo de la zona explotada, esdecir, si s( ξ, η)= en A y s( ξ η)s m, = 0 en cualquier otro punto, los resultados obtenidosa partir de las ecuaciones 38 a 43 son iguales a los conseguidos mediante el método dela función de influencia.Para evitar las incongruencias en los resultados obtenidos por cualquiera de losdos métodos es importante que todas las funciones de influencia reúnan una serie de4 donde f ′( ρ 2 ) = d f ( ρ 2 ) d ρ2y g′( ρ 2)están definidas de manera análoga.44
equisitos, que se derivan de la naturaleza física del problema. El campo dedesplazamientos inducidos por la explotación de una pequeña área de la capa debe sersimilar al originado por las áreas elementales. Claramente, las distribuciones de losdesplazamientos y de las deformaciones deben estar libres de singularidades ydiscontinuidades. Estos requisitos exigen un determinado comportamiento de lasfunciones f, g y de sus primeras derivadas.La distribución de los desplazamientos verticales constituye una cubeta consimetría axial, cóncava desde arriba y con un valor extremo regular en su centro, esdecir, ∂∆w ∂x = ∂∆w ∂y= 0 en r = 0 . Los desplazamientos horizontales son radiales y,a una distancia determinada del centro de la cubeta, tienen la misma magnitud,apuntando todos hacia o desde el centro de la cubeta de hundimientos. Por esto, lascomponentes ortogonales de los vectores de desplazamiento horizontal deben serfunciones impares de las correspondientes coordenadas cartesianas. Las condiciones desimetría se cumplen y se evitan las discontinuidades y singularidades si ∆w y ∆u rsonfunciones continuas, en el intervalo [ 0,∞ ) , siendo funciones pares e impares de ρrespectivamente. Las definiciones propuestas en la ecuación 48 satisfacen estosrequisitos. Es tentador sugerir que ambas funciones f y g deben ser monótonasdecrecientes respecto a ρ 2 , es decir, se debe tener df d ρ 2 < 0 , d g d ρ 2 < 0 . Estossupuestos han sido aceptados anteriormente en todos los intentos de creación demedidas de control de la subsidencia. Existen hoy, sin embargo, algunos resultados nopublicados que sugieren que la función f no necesita ser siempre monótona. Si la masarocosa está laminada y el módulo de Young de las láminas no es el mismo en cada unade ellas, los desplazamientos verticales elementales pueden oscilar alrededor de cero amedida que la distancia r se aproxima a infinito (Salamon [96]).Las investigaciones de campo realizadas prueban que los desplazamientosverticales alcanzan su valor máximo en un punto P si se ha explotado una gran áreainmediatamente debajo de él, es decir, w( P)Esta evidencia conduce al siguiente criterio∞0f tŠŒ‹d t = 1= cuando la zona explotada es grande.s m(56)También estas observaciones indican que no debe existir deformación en el puntoP si se ha extraído una zona supercrítica de la capa respecto a dicho punto. Estos y otros2 2 3 2requisitos similares exigen que ρ f ( ρ ) y ρ ( ρ )que ρ se aproxima a infinito.g permanezcan acotadas a medidaSe supone en toda la zona que las funciones de influencia se aproximanasintóticamente a cero a medida que ρ tiende a infinito. En otras palabras, esto significa45
que no se tiene en cuenta el concepto de ángulo de derrumbe o ángulo límite. De hecho,el uso de este ángulo, que en ningún caso puede ser definido conceptualmente, nosupone ninguna ventaja. En la práctica una función de influencia bien elegida dará unpeso despreciable a cualquier zona minada fuera del área central de influencia.46
Ž6‘“’;”6•—–6˜š:›œž˜—“•—Ÿ“ 2”¡ ¢—Ÿ¤£¥˜—¢¦Ÿ –6§¨žŽo;©—ª ¢—Ÿ¤–¡ ¡•—«o 2¢—Ÿ“ª—Žo¬
o4š@®4¯,3-:46,D°>š5;±%4Como se vio en el capítulo I (ecuación 38), Ramírez propone un modelo genéricoen el que se recogen de alguna forma las distintas expresiones de funciones deinfluencia que aparecen en la bibliografía consultada. Para tener en cuenta la potencia mde las labores subterráneas, se expresa el valor de la subsidencia máxima en función deaquella, afectándola de un factor corrector a, que depende básicamente del tratamientodel taller que se realiza con posterioridad al término de la explotación.w =a ⋅m( 1+4n)( kh)2⎛ −kh⋅ ⎛ ⎝e⎜ ⎞⎠⎜+ n ⋅e⎝2⎟ − ⎛ 2π ρ ⎝ ⎜ ρπ⎞⎟2kh⎠Con el fin de determinar la importancia e influencia de cada uno de losparámetros presentes en esta expresión, se han estudiado tres modelos sencillos deexplotación, representados esquemáticamente a continuación. En todos los casos sesupone una superficie del terreno y una capa de carbón planas, variando el ángulo queforman con la horizontal en los modelos 2 y 3. Por otro lado, se ha asignado un valor de1,5 m a la potencia de la capa, siendo la longitud de la proyección horizontal de la zonaexplotada de 100 m.⎞⎟⎠(57)<strong>$#</strong> ”ü”ýÿ #<strong>$#</strong> ”ü”ýÿ #48
”ü”ýÿ#<strong>$#</strong>”÷ øT<strong>$#</strong> ”ü”ý”ÿ ¦¢²£lý”û”ô¥ñ ú ¦¢$ý¦§#”ÿý”õ”ü! ¦¢Põ”ôeõ~úõ”ô¥õ”ú¤£lý”ôeñQõ”ôjÿ ¦¢)”õô¨M¦§~ý*£lô¨ ¦¢š³Éµð³ñò”ó”ô¥õ#!Para cada uno de los modelos propuestos se han generado las cubetas dehundimiento correspondientes a los siguientes rangos de los parámetros:[ 2 2] [ 2 2] [ 2 2]a ∈ − , ; k ∈ − , ; n ∈ − , (58)ya que desde un punto de vista analítico los valores negativos de los parámetros parecenapropiados, aunque no lo sean tanto desde un punto de vista físico. Por ejemplo, en elcaso del parámetro a, parece ilógico que el tratamiento posterior a la explotación deltaller de lugar a la divergencia del techo.Para su estudio comparativo se han escogido nueve ejemplos de cada modelo, enlos que se recoge la variación de la cubeta de hundimiento en función de cadaparámetro (nueve valores dentro del rango), siendo constantes los otros dos. En lasfiguras 13 a 21, se presentan los resultados gráficos de cada uno de estos estudios.Según estos datos, se puede concluir que el parámetro a tiene una efectobásicamente multiplicativo, sin ningún efecto cualitativo sobre la cubeta, manteniéndosesu forma al variar el valor de a. Únicamente existe una influencia cuantitativa sobre elvalor máximo del hundimiento, que varía linealmente con a.En cuanto al parámetro k, este influye directamente sobre la forma que adopta lacubeta de hundimiento. Para valores crecientes de k, la cubeta se hace menos profundapero más ancha, invirtiéndose este comportamiento para valores pequeños. Para k=0, lacubeta de hundimiento no existe. Como se observa fácilmente en la expresión de lafunción de influencia analizada, esta es una función cuadrática en k, por lo que losvalores negativos de este parámetro podrían descartarse. Así mismo, valores elevadosde este parámetro tienen efectos concentradores sobre la cubeta, mientras que valorespequeños hacen que la subsidencia tengan una mayor distribución sobre la superficie,aumentado el ángulo límite.Por último, el parámetro n afecta localmente a la forma de la cubeta presentadouna discontinuidad para el valor n = −0,25 , momento en el que la cubeta cambia su49
forma drásticamente. Para valores de n grandes, tanto negativos como positivos lacubeta adopta una forma normal. Sin embargo, para n ≈ −2 la cubeta cambia sucomportamiento en los puntos centrales y pasa de presentar una forma cóncava a formaruna convexidad que crece a medida que se acerca a n = −0,25 .A parte del estudio específico de cada parámetro, en este análisis se puedeapreciar el efecto que la inclinación, tanto de las labores mineras como de la propiasuperficie del terreno, tiene sobre la forma de la cubeta de hundimiento. Es patente, a lavista de estas figuras, que el primero de estos efectos tiene mayor importancia paravalores negativos de n, mientras que la inclinación del terreno se refleja en una perdidade la simetría vertical de la cubeta, manifestándose incluso para valores genéricos de losparámetros a y k. Esta deformación se acentúa a medida que la profundidad de la capadisminuye.En la práctica, de estos dos efectos, la falta de horizontalidad del terreno pareceser el más importante a la hora de caracterizar la forma asimétrica de las cubetas dehundimiento.50
···0.080.060.04A:-2.00 K: 0.50 N: 1.00A:-1.50 K: 0.50 N: 1.00A:-1.00 K: 0.50 N: 1.00A:-0.50 K: 0.50 N: 1.00A: 0.00 K: 0.50 N: 1.00A: 0.50 K: 0.50 N: 1.00A: 1.00 K: 0.50 N: 1.00A: 1.50 K: 0.50 N: 1.00A: 2.00 K: 0.50 N: 1.00Desplazamiento Vertical (m)0.020-0.02-0.04-0.06-0.080 200 400 600 800 1000(m)0.030.02A:-2.00 K:-1.00 N: 0.50A:-1.50 K:-1.00 N: 0.50A:-1.00 K:-1.00 N: 0.50A:-0.50 K:-1.00 N: 0.50A: 0.00 K:-1.00 N: 0.50A: 0.50 K:-1.00 N: 0.50A: 1.00 K:-1.00 N: 0.50A: 1.50 K:-1.00 N: 0.50A: 2.00 K:-1.00 N: 0.50Desplazamiento Vertical (m)0.010-0.01-0.02-0.030 200 400 600 800 1000(m)0.0250.020.015A:-2.00 K: 1.00 N:-0.50A:-1.50 K: 1.00 N:-0.50A:-1.00 K: 1.00 N:-0.50A:-0.50 K: 1.00 N:-0.50A: 0.00 K: 1.00 N:-0.50A: 0.50 K: 1.00 N:-0.50A: 1.00 K: 1.00 N:-0.50A: 1.50 K: 1.00 N:-0.50A: 2.00 K: 1.00 N:-0.500.01Desplazamiento Vertical (m)0.0050-0.005-0.01-0.015-0.02-0.0250 200 400 600 800 1000(m)ð³ñò”ó”ô¥õ#!¸”÷ ø%I 󦥔ý&£lõ¦¢ü”ý#”óù”ü”ñ§~ñ ý”ù&£' #”õ”ôeõ~ý”ÿ¡§# ”ü”ý”ÿ #~ý”ùEþló”ùúñûù~ü”ý³51
···0-0.002-0.004A: 0.50 K:-2.00 N: 1.00A: 0.50 K:-1.50 N: 1.00A: 0.50 K:-1.00 N: 1.00A: 0.50 K:-0.50 N: 1.00A: 0.50 K: 0.00 N: 1.00A: 0.50 K: 0.50 N: 1.00A: 0.50 K: 1.00 N: 1.00A: 0.50 K: 1.50 N: 1.00A: 0.50 K: 2.00 N: 1.00-0.006Desplazamiento Vertical (m)-0.008-0.01-0.012-0.014-0.016-0.018-0.020 200 400 600 800 1000(m)0.050.0450.04A:-1.00 K:-2.00 N: 0.50A:-1.00 K:-1.50 N: 0.50A:-1.00 K:-1.00 N: 0.50A:-1.00 K:-0.50 N: 0.50A:-1.00 K: 0.00 N: 0.50A:-1.00 K: 0.50 N: 0.50A:-1.00 K: 1.00 N: 0.50A:-1.00 K: 1.50 N: 0.50A:-1.00 K: 2.00 N: 0.500.035Desplazamiento Vertical (m)0.030.0250.020.0150.010.00500 200 400 600 800 1000(m)0.040.03A: 1.00 K:-2.00 N:-0.50A: 1.00 K:-1.50 N:-0.50A: 1.00 K:-1.00 N:-0.50A: 1.00 K:-0.50 N:-0.50A: 1.00 K: 0.00 N:-0.50A: 1.00 K: 0.50 N:-0.50A: 1.00 K: 1.00 N:-0.50A: 1.00 K: 1.50 N:-0.50A: 1.00 K: 2.00 N:-0.50Desplazamiento Vertical (m)0.020.010-0.01-0.020 200 400 600 800 1000(m)ðjñò”ó”ôeõ#ö”÷ ø%I ó¥”ý&£lõ¦¢$üý#”ó”ù”ü”ñ §~ñý”ù&£' :”õ”ô¥õ†ý”ÿ§# ”ü”ý”ÿ #~ý”ùþló”ù”úñ û”ù~ü”ý´52
···0.0080.0060.004A: 0.50 K: 1.00 N:-2.00A: 0.50 K: 1.00 N:-1.50A: 0.50 K: 1.00 N:-1.00A: 0.50 K: 1.00 N:-0.50A: 0.50 K: 1.00 N: 0.00A: 0.50 K: 1.00 N: 0.50A: 0.50 K: 1.00 N: 1.00A: 0.50 K: 1.00 N: 1.50A: 0.50 K: 1.00 N: 2.000.002Desplazamiento Vertical (m)0-0.002-0.004-0.006-0.008-0.01-0.012-0.0140 200 400 600 800 1000(m)0.10.08A:-1.00 K: 0.50 N:-2.00A:-1.00 K: 0.50 N:-1.50A:-1.00 K: 0.50 N:-1.00A:-1.00 K: 0.50 N:-0.50A:-1.00 K: 0.50 N: 0.00A:-1.00 K: 0.50 N: 0.50A:-1.00 K: 0.50 N: 1.00A:-1.00 K: 0.50 N: 1.50A:-1.00 K: 0.50 N: 2.000.06Desplazamiento Vertical (m)0.040.020-0.02-0.040 200 400 600 800 1000(m)0.040.02A: 1.00 K:-0.50 N:-2.00A: 1.00 K:-0.50 N:-1.50A: 1.00 K:-0.50 N:-1.00A: 1.00 K:-0.50 N:-0.50A: 1.00 K:-0.50 N: 0.00A: 1.00 K:-0.50 N: 0.50A: 1.00 K:-0.50 N: 1.00A: 1.00 K:-0.50 N: 1.50A: 1.00 K:-0.50 N: 2.000Desplazamiento Vertical (m)-0.02-0.04-0.06-0.08-0.10 200 400 600 800 1000(m)ð³ñò”ó”ô¥õ#!"”÷ ø%I 󦥔ý&£lõ¦¢ü”ý#”óù”ü”ñ§~ñ ý”ù&£' #”õ”ôeõ~ý”ÿ¡§# ”ü”ý”ÿ #~ý”ùEþló”ùúñûù~ü”ýµ53
···0.080.060.04A:-2.00 K: 0.50 N: 1.00A:-1.50 K: 0.50 N: 1.00A:-1.00 K: 0.50 N: 1.00A:-0.50 K: 0.50 N: 1.00A: 0.00 K: 0.50 N: 1.00A: 0.50 K: 0.50 N: 1.00A: 1.00 K: 0.50 N: 1.00A: 1.50 K: 0.50 N: 1.00A: 2.00 K: 0.50 N: 1.00Desplazamiento Vertical (m)0.020-0.02-0.04-0.06-0.080 200 400 600 800 1000(m)0.030.02A:-2.00 K:-1.00 N: 0.50A:-1.50 K:-1.00 N: 0.50A:-1.00 K:-1.00 N: 0.50A:-0.50 K:-1.00 N: 0.50A: 0.00 K:-1.00 N: 0.50A: 0.50 K:-1.00 N: 0.50A: 1.00 K:-1.00 N: 0.50A: 1.50 K:-1.00 N: 0.50A: 2.00 K:-1.00 N: 0.50Desplazamiento Vertical (m)0.010-0.01-0.02-0.030 200 400 600 800 1000(m)0.0250.020.015A:-2.00 K: 1.00 N:-0.50A:-1.50 K: 1.00 N:-0.50A:-1.00 K: 1.00 N:-0.50A:-0.50 K: 1.00 N:-0.50A: 0.00 K: 1.00 N:-0.50A: 0.50 K: 1.00 N:-0.50A: 1.00 K: 1.00 N:-0.50A: 1.50 K: 1.00 N:-0.50A: 2.00 K: 1.00 N:-0.500.01Desplazamiento Vertical (m)0.0050-0.005-0.01-0.015-0.02-0.0250 200 400 600 800 1000(m)ð³ñò”ó”ô¥õ#!H”÷ ø%I 󦥔ý&£lõ¦¢ü”ý#”óù”ü”ñ§~ñ ý”ù&£' #”õ”ôeõ~ý”ÿ¡§# ”ü”ý”ÿ #~ý”ùEþló”ùúñûù~ü”ý³54
···0-0.002-0.004A: 0.50 K:-2.00 N: 1.00A: 0.50 K:-1.50 N: 1.00A: 0.50 K:-1.00 N: 1.00A: 0.50 K:-0.50 N: 1.00A: 0.50 K: 0.00 N: 1.00A: 0.50 K: 0.50 N: 1.00A: 0.50 K: 1.00 N: 1.00A: 0.50 K: 1.50 N: 1.00A: 0.50 K: 2.00 N: 1.00-0.006Desplazamiento Vertical (m)-0.008-0.01-0.012-0.014-0.016-0.018-0.020 200 400 600 800 1000(m)0.050.0450.04A:-1.00 K:-2.00 N: 0.50A:-1.00 K:-1.50 N: 0.50A:-1.00 K:-1.00 N: 0.50A:-1.00 K:-0.50 N: 0.50A:-1.00 K: 0.00 N: 0.50A:-1.00 K: 0.50 N: 0.50A:-1.00 K: 1.00 N: 0.50A:-1.00 K: 1.50 N: 0.50A:-1.00 K: 2.00 N: 0.500.035Desplazamiento Vertical (m)0.030.0250.020.0150.010.00500 200 400 600 800 1000(m)0.040.03A: 1.00 K:-2.00 N:-0.50A: 1.00 K:-1.50 N:-0.50A: 1.00 K:-1.00 N:-0.50A: 1.00 K:-0.50 N:-0.50A: 1.00 K: 0.00 N:-0.50A: 1.00 K: 0.50 N:-0.50A: 1.00 K: 1.00 N:-0.50A: 1.00 K: 1.50 N:-0.50A: 1.00 K: 2.00 N:-0.50Desplazamiento Vertical (m)0.020.010-0.01-0.020 200 400 600 800 1000(m)ðjñò”ó”ôeõ#!”÷ ø%I ó¥”ý&£lõ¦¢$üý#”ó”ù”ü”ñ §~ñý”ù&£' :”õ”ô¥õ†ý”ÿ§# ”ü”ý”ÿ #~ý”ùþló”ù”úñ û”ù~ü”ý´55
···0.0080.0060.004A: 0.50 K: 1.00 N:-2.00A: 0.50 K: 1.00 N:-1.50A: 0.50 K: 1.00 N:-1.00A: 0.50 K: 1.00 N:-0.50A: 0.50 K: 1.00 N: 0.00A: 0.50 K: 1.00 N: 0.50A: 0.50 K: 1.00 N: 1.00A: 0.50 K: 1.00 N: 1.50A: 0.50 K: 1.00 N: 2.000.002Desplazamiento Vertical (m)0-0.002-0.004-0.006-0.008-0.01-0.012-0.0140 200 400 600 800 1000(m)0.10.08A:-1.00 K: 0.50 N:-2.00A:-1.00 K: 0.50 N:-1.50A:-1.00 K: 0.50 N:-1.00A:-1.00 K: 0.50 N:-0.50A:-1.00 K: 0.50 N: 0.00A:-1.00 K: 0.50 N: 0.50A:-1.00 K: 0.50 N: 1.00A:-1.00 K: 0.50 N: 1.50A:-1.00 K: 0.50 N: 2.000.06Desplazamiento Vertical (m)0.040.020-0.02-0.040 200 400 600 800 1000(m)0.040.02A: 1.00 K:-0.50 N:-2.00A: 1.00 K:-0.50 N:-1.50A: 1.00 K:-0.50 N:-1.00A: 1.00 K:-0.50 N:-0.50A: 1.00 K:-0.50 N: 0.00A: 1.00 K:-0.50 N: 0.50A: 1.00 K:-0.50 N: 1.00A: 1.00 K:-0.50 N: 1.50A: 1.00 K:-0.50 N: 2.000Desplazamiento Vertical (m)-0.02-0.04-0.06-0.08-0.10 200 400 600 800 1000(m)ð³ñò”ó”ô¥õ#!”÷ ø%I 󦥔ý&£lõ¦¢ü”ý#”óù”ü”ñ§~ñ ý”ù&£' #”õ”ôeõ~ý”ÿ¡§# ”ü”ý”ÿ #~ý”ùEþló”ùúñûù~ü”ýµ56
···0.080.060.04A:-2.00 K: 0.50 N: 1.00A:-1.50 K: 0.50 N: 1.00A:-1.00 K: 0.50 N: 1.00A:-0.50 K: 0.50 N: 1.00A: 0.00 K: 0.50 N: 1.00A: 0.50 K: 0.50 N: 1.00A: 1.00 K: 0.50 N: 1.00A: 1.50 K: 0.50 N: 1.00A: 2.00 K: 0.50 N: 1.00Desplazamiento Vertical (m)0.020-0.02-0.04-0.06-0.080 200 400 600 800 1000(m)0.030.02A:-2.00 K:-1.00 N: 0.50A:-1.50 K:-1.00 N: 0.50A:-1.00 K:-1.00 N: 0.50A:-0.50 K:-1.00 N: 0.50A: 0.00 K:-1.00 N: 0.50A: 0.50 K:-1.00 N: 0.50A: 1.00 K:-1.00 N: 0.50A: 1.50 K:-1.00 N: 0.50A: 2.00 K:-1.00 N: 0.50Desplazamiento Vertical (m)0.010-0.01-0.02-0.030 200 400 600 800 1000(m)0.0250.020.015A:-2.00 K: 1.00 N:-0.50A:-1.50 K: 1.00 N:-0.50A:-1.00 K: 1.00 N:-0.50A:-0.50 K: 1.00 N:-0.50A: 0.00 K: 1.00 N:-0.50A: 0.50 K: 1.00 N:-0.50A: 1.00 K: 1.00 N:-0.50A: 1.50 K: 1.00 N:-0.50A: 2.00 K: 1.00 N:-0.500.01Desplazamiento Vertical (m)0.0050-0.005-0.01-0.015-0.02-0.0250 200 400 600 800 1000(m)ð³ñò”ó”ô¥õ#!S”÷ ø%I 󦥔ý&£lõ¦¢ü”ý#”óù”ü”ñ§~ñ ý”ù&£' #”õ”ôeõ~ý”ÿ¡§# ”ü”ý”ÿ # ~ý”ùEþló”ùúñûù~ü”ý³57
···0-0.002-0.004A: 0.50 K:-2.00 N: 1.00A: 0.50 K:-1.50 N: 1.00A: 0.50 K:-1.00 N: 1.00A: 0.50 K:-0.50 N: 1.00A: 0.50 K: 0.00 N: 1.00A: 0.50 K: 0.50 N: 1.00A: 0.50 K: 1.00 N: 1.00A: 0.50 K: 1.50 N: 1.00A: 0.50 K: 2.00 N: 1.00-0.006Desplazamiento Vertical (m)-0.008-0.01-0.012-0.014-0.016-0.018-0.020 200 400 600 800 1000(m)0.050.0450.04A:-1.00 K:-2.00 N: 0.50A:-1.00 K:-1.50 N: 0.50A:-1.00 K:-1.00 N: 0.50A:-1.00 K:-0.50 N: 0.50A:-1.00 K: 0.00 N: 0.50A:-1.00 K: 0.50 N: 0.50A:-1.00 K: 1.00 N: 0.50A:-1.00 K: 1.50 N: 0.50A:-1.00 K: 2.00 N: 0.500.035Desplazamiento Vertical (m)0.030.0250.020.0150.010.00500 200 400 600 800 1000(m)0.040.03A: 1.00 K:-2.00 N:-0.50A: 1.00 K:-1.50 N:-0.50A: 1.00 K:-1.00 N:-0.50A: 1.00 K:-0.50 N:-0.50A: 1.00 K: 0.00 N:-0.50A: 1.00 K: 0.50 N:-0.50A: 1.00 K: 1.00 N:-0.50A: 1.00 K: 1.50 N:-0.50A: 1.00 K: 2.00 N:-0.50Desplazamiento Vertical (m)0.020.010-0.01-0.020 200 400 600 800 1000(m)ðjñò”ó”ôeõ#!”÷ ø%I ó¥”ý&£lõ¦¢$üý#”ó”ù”ü”ñ §~ñý”ù&£' :”õ”ô¥õ†ý”ÿ§# ”ü”ý”ÿ # ~ý”ùþló”ù”úñ û”ù~ü”ý´58
···0.0080.0060.004A: 0.50 K: 1.00 N:-2.00A: 0.50 K: 1.00 N:-1.50A: 0.50 K: 1.00 N:-1.00A: 0.50 K: 1.00 N:-0.50A: 0.50 K: 1.00 N: 0.00A: 0.50 K: 1.00 N: 0.50A: 0.50 K: 1.00 N: 1.00A: 0.50 K: 1.00 N: 1.50A: 0.50 K: 1.00 N: 2.000.002Desplazamiento Vertical (m)0-0.002-0.004-0.006-0.008-0.01-0.012-0.0140 200 400 600 800 1000(m)0.10.08A:-1.00 K: 0.50 N:-2.00A:-1.00 K: 0.50 N:-1.50A:-1.00 K: 0.50 N:-1.00A:-1.00 K: 0.50 N:-0.50A:-1.00 K: 0.50 N: 0.00A:-1.00 K: 0.50 N: 0.50A:-1.00 K: 0.50 N: 1.00A:-1.00 K: 0.50 N: 1.50A:-1.00 K: 0.50 N: 2.000.06Desplazamiento Vertical (m)0.040.020-0.02-0.040 200 400 600 800 1000(m)0.040.02A: 1.00 K:-0.50 N:-2.00A: 1.00 K:-0.50 N:-1.50A: 1.00 K:-0.50 N:-1.00A: 1.00 K:-0.50 N:-0.50A: 1.00 K:-0.50 N: 0.00A: 1.00 K:-0.50 N: 0.50A: 1.00 K:-0.50 N: 1.00A: 1.00 K:-0.50 N: 1.50A: 1.00 K:-0.50 N: 2.000Desplazamiento Vertical (m)-0.02-0.04-0.06-0.08-0.10 200 400 600 800 1000(m)ð³ñò”ó”ô¥õ#!”÷ ø%I 󦥔ý&£lõ¦¢ü”ý#”óù”ü”ñ§~ñ ý”ù&£' #”õ”ôeõ~ý”ÿ¡§# ”ü”ý”ÿ # ~ý”ùEþló”ùúñûù~ü”ýµ59
Es necesario destacar también que en la práctica habitual, bien empleando elmanual de la NCB u otras técnicas similares, los rangos de los parámetros empleados enla función de influencia son bastante limitados, variando de una expresión a otra de lafunción de influencia. En general, los valores más empleados en la bibliografía(Ramírez [86]) son:[ ]a ∈ 0, 1 ; k ≥ 0 ; n ≥ 0Este estudio, permite observar que los valores negativos de n presentan un graninterés y no se puede descartar su empleo.Modificaciones en la estructura de la Función de Influencia propuestaDesde un punto de vista formal y teniendo en cuenta las hipótesis formuladasanteriormente, en este trabajo se presentan varias innovaciones en la expresión final dela función de influencia tendentes a relajar algunas de la condiciones impuestas. Enprimer lugar se propone una generalización del problema plano visto hasta ahora,pasando a ser tridimensional lo que supone una relajación del principio de simetríarotacional. En segundo lugar, se elimina el término 1+ 4n lo que se traduce en unarelajación de la constancia de volumen, incluyendo la posible variación dentro delparámetro a.Así, para la realización de este trabajo, la función de influencia teórica elegida,por su carácter más genérico, es la siguiente:∆∆⎡m ⋅a⋅ ∆Aρρ−π⎛ 2π⎝ ⎜ ⎞⎟ − ⎛ 2⎝ ⎜ ⎞⎟⎠θkθh kθhw( ρ, θ, h)= ⎢⎠22e + nθ⋅e( kθh)⎢⎣ρv = ∆w hdonde m, ∆A son la potencia y el área, respectivamente, del elemento extraído, a θes elcoeficiente de subsidencia y k θ, n θson parámetros independientes, función todos de ladirección θ desde el punto P de la superficie al centro de gravedad del elementoanalizado.⎤⎥⎥⎦(59)Se supone con esto que el macizo rocoso afectado se comporta de formaortotrópica, lo que supone una mejora de la caracterización de sus propiedades, ya queeste generalmente no tendrá un comportamiento isotrópico, como se proponía en elprincipio de simetría rotacional. Debe recordarse aquí que las propiedades del terreno secaracterizan, de alguna forma, mediante los parámetros a, k y n; de ahí que se pretendaintroducir en ellos cierta variabilidad con el fin de mejorar el ajuste.60
¼Ã夻¹¦º» ¹θθ½¿¾ÁÀ¾ÁÀðjñ ò”óôeõ#! ”÷ øTÂœõ”ÿ ”ô¥ý¦¢$ú£õôeõ”ú¤£lý”ô¨N ¢£lñú ¦¢$ü”ý”ÿ¡”õô¨M¦§~ý&£lô ³El valor de cada parámetro se puede expresar de la siguiente forma, en función desus valores característicos, representados en la figura 23 para el caso del parámetro a( a , a ):xpyp( xpcos ) ( ypsin )2 2aθ = a θ + a θdonde el origen del sistema de coordenadas coincide con el centro de gravedad delelemento de volumen evaluado en cada momento.Desde un punto de vista físico el modelo propuesto supone el estudio de lasubsidencia en dos planos ortogonales verticales que pasan por el centro de gravedad decada elemento de volumen explotado. La continuidad del fenómeno en los distintosplanos comprendidos entre ambos se proporciona a través de una variación suave de losparámetros de la función de influencia, obtenida a partir de los valores característicos decada parámetro.Para evitar la discontinuidad de la función de influencia para valores de npróximos a -0,25, como se verá más adelante, se propone la introducción de un nuevofactor en la expresión de la función de influencia que sustituya al término 1+ 4n θ.Esto permite que el algoritmo optimizador, descrito en el capítulo III, no encuentrevalores característicos del parámetro n, que luego podrían dar lugar a unaindeterminación en alguno de los puntos que componen el modelo digital del terrenosobre el que se realiza la integración de la función de influencia.Es obligado destacar aquí la relajación de la constancia de los parámetros en todaslas zonas explotadas (principio de equivalencia), pues la aproximación propuestasupone dicha constancia únicamente dentro de cada zona individual, pudiendo variar elconjunto de parámetros de una a otra. Esto permite acomodar el modelo de una formamás precisa a las singularidades del macizo rocoso, ya no a su comportamientoortotrópico que es una propiedad global de todo el macizo afectado. De esta forma, es(60)61
posible tener en cuenta factores locales existentes en el entorno de la zona explotadacomo fracturas, fallas, etc.El único inconveniente que podría presentar la formulación del problema de lasubsidencia sugerida en este trabajo, es la dificultad de encontrar y ajustar un númeroelevado de parámetros del mejor modo posible. En el siguiente capítulo se propone unmétodo novedoso para resolver este problema62
.o,34š@CÆAÇ0G±T4šo,34Los métodos predictivos presentados anteriormente están basados, como se havisto, en el estado final de los movimientos del terreno afectado por las laboressubterráneas. En la minería de carbón, este proceso puede completarse en un período detiempo que varía entre 6 meses y 5 años después del término de la explotación, pero enlas explotaciones por cámaras y pilares de la minería metálica, este proceso puede tardaren producirse más de 100 años. Por lo tanto, en la planificación y protección de lasestructuras que pueden verse afectadas por una explotación minera, debe ocupar unlugar importante el desarrollo intermedio de la subsidencia, resultado del continuoavance de la explotación y de su efecto a largo plazo.Como es bien sabido, los valores locales de la subsidencia, pendiente y curvaturadel terreno, así como los desplazamientos horizontales y las tensiones de compresión ytracción, varían durante el transcurso de la explotación. Así, por ejemplo, una estructuradeterminada que finalmente quede sometida a un estado de compresión puede haberatravesado un estado intermedio de tracción.El factor de tiempo c, que expresa la relación existente entre la subsidencia finalw f(asintótica) y la subsidencia dinámica w den un determinado instante:c =wwdf(61)tiene un significado práctico importante para determinar:- el instante en el tiempo en que los efectos de las labores empiezan a serpeligrosos, con el fin de establecer medidas preventivas contra las previsiblesdificultades operativas que aparecerán.- cuándo el movimiento del terreno alcanzará su punto final, para establecermedidas correctoras de los efectos.- dónde se producirá la mayor tensión que afecte a una estructura, para controlarsu magnitud y los efectos sobre la misma.- los desplazamientos intermedios, con el fin de corregir en el tiempo loshundimientos producidos en carreteras y puentes o realizar trabajos correctoresen los cauces de los ríos, canales, diques o drenajes.- la interacción de distintos hundimientos causados por varias labores subterráneasen una misma zona de la superficie, para establecer planes operativos queminimicen la curvatura, pendiente y deformación lineal en dicha zona,reduciendo con ello los daños.63
- los desplazamientos verticales, compresiones e inclinación intermedios de lospozos de extracción, con el fin de juzgar el posible daño que se podría produciren la alineación del pozo con las consiguientes repercusiones negativas en laslabores de extracción.La creación de un hueco o abertura subterráneo no da lugar inmediatamente a laaparición de una cubeta de hundimiento de igual volumen en la superficie. Esta cubetase forma gradualmente, extendiéndose en la dirección del avance de la explotación yprofundizándose incluso después de la finalización de las labores. Esta subsidenciaretrasada de los estratos situados por encima de la explotación tiene su origen, por unlado, en los siguientes fenómenos:- la estabilidad de las labores subterráneas hasta el momento de realizar un nuevoavance.- el colapso gradual del techo de la excavación, que llena el hueco abierto.- la compactación lenta pero creciente de los materiales de relleno y losfragmentos caídos del techo, en los métodos de explotación con relleno.- la convergencia de los pilares, que depende del tiempo y la carga soportada, enaquellas explotaciones por cámaras y pilares.y, por otro, en la relación temporal existente entre la imposición y liberación de lacarga, expansión vertical y contracción, pandeo de estratos, propagación de fracturas,separación de estratos, y deslizamiento (plástico) de los estratos situados encima ydebajo de la explotación.Es cierto, que en las explotaciones de carbón donde las capas se extraen engrandes talleres sin pilares de soporte, la subsidencia ha podido ser medida en el rangode centímetros inmediatamente después que el vano abierto alcanza un tamaño mínimoy el techo se colapsa. En tales casos, los estratos superiores se hunden simultáneamentecomo un solo grupo. También, tiene lugar una reducción de la tensión sobre la zonaexplotada, pero en la dirección perpendicular a los estratos minados, lo que da lugar auna expansión y abertura vertical que se traduce en una disminución y ralentización delhundimiento a medida que la subsidencia se traslada hacia arriba.Por tanto, antes que la convergencia del área de extracción se refleje en lasuperficie en forma de una cubeta de hundimiento, después de atravesar todos losestratos afectados, transcurre un período de tiempo más o menos largo. Si el área deextracción aumenta de tamaño, las tensiones y deformaciones en el macizo rocoso sealteran consecuentemente, lo que origina un incremento local de la subsidencia ensuperficie, mientras que la magnitud de la pendiente, curvatura y deformación unitariadisminuye e incluso cambia de signo, dependiendo de la posición respecto al frente dela explotación. Sólo cuando en el frente se ha detenido definitivamente, la excavación64
ÉÊse ha cerrado y el material de relleno se ha compactado completamente debido a lapresión de los estratos superiores, es posible alcanzar un nuevo equilibrio de fuerzas enel macizo rocoso afectado por la subsidencia, lo que se refleja en la forma definitiva dela cubeta de hundimiento.Métodos PropuestosLa mayoría de los métodos desarrollados para predecir el movimiento del terrenodebido a explotaciones subterráneas se han concentrado, en general, en el estado final(asintótico) de las deformaciones. En el caso de Estados Unidos, el limitado trabajollevado a cabo para describir este proceso como dependiente del tiempo, no permite ladeterminación de índices de deformación en las etapas intermedias de la subsidencia. Eldiseño apropiado de las labores, así como una correcta planificación de las medidasestructurales para prevenir o minimizar el daño en las estructuras situadas en lasuperficie afectada necesitan, sin embargo, métodos predictivos capaces de evaluar elavance de la subsidencia con el tiempo.Las soluciones propuestas, independientes del tiempo, ignoran frecuentementemuchos datos valiosos obtenidos durante el proceso de control de la subsidencia. Eldesarrollo de un método dependiente del tiempo permitiría hacer uso de tales datos paraconseguir métodos más precisos.A continuación se comentan algunos métodos existentes para la predicción de lasubsidencia en el tiempo, desarrollados principalmente en las explotaciones europeas detajo largo.Relaciones Subsidencia-TiempoLas relaciones entre la subsidencia y el tiempo han sido desarrolladas tantoempíricamente como teóricamente, las más aceptadas se han presentado en el estado delarte. Como allí se vio, la función que representa la influencia del tiempo durante eldesarrollo de la subsidencia puede ser expresada como:( ) = 1 − exp( −ct)z t(62)De aquí se deduce que las relaciones recogidas en las ecuaciones 3, 4, 5, 9, 11, 33(si c( t ) = const.) y 34 (si ξ = ∞ ) recogidas en el estado del arte, son idénticas, y puedenser expresadas bajo la forma de una ecuación diferencial como:[ ]f( ) = ( ) − ( )S t c S t S t(63)dondeS( )S t = velocidad de subsidenciaf( t)= subsidencia final (asintótica) en el instante t65
ÔÙÚÓS( t ) = subsidencia actual en el instante t[ S f( t) − S( t)]= subsidencia potencial en el instante tc = factor de tiempoLa solución de la ecuación anterior es:tff( ) ( ) ( ) ( ) ( )S t = S t − exp −ct Ë ∫ S λ exp cλ d λ0 (64)La forma final de la solución depende de la relación utilizada para describir elfestado final (asintótico) de la subsidencia S ( t)Por ejemplo, si la subsidencia final se describe haciendo uso del método de lafunción de influencia, basado en la distribución normal de las influencias elementales(Knothe [10]), entonces es posible obtener la solución específica para una explotaciónrectangular (Sroka [63]) con un único lado en avance, próximo a la explotación por tajolargo, como se recoge en la figura 24..ÚÛÎÔ¬ØÓÖÓ¦ÕÌ&ÍÏήÐÎÒÑÔ¦×ðjñ ò”óôeõ#!¸”÷ ø%Ü$ý¦ ¦§~ý&£lô¨N õ~ü”ý”ÿM”ôeý”õ~ý&J(”ÿ &£lõ”ü”õ~ú ”ù~ó”ù#Ý”ù”ñ ú Eþlôeý”ù&£lýSuponiendo que el origen del sistema de coordenadas está situado en el puntoP(0,0), donde se calculará la subsidencia, y que la excavación avanza con velocidadconstante v según la dirección del eje x, con un ancho constante y 2 -y 1 , entonces el áreaen un instante t puede describirse por las coordenadasx , x = x + vt0 t 0y , y1 2(65)66
La subsidencia final para esta excavación puede expresarse como:2 2S xft y2⎛ x yS ( xt, x , y , y ,max+ ⎞0 1 2z)= exp d x d y2r∫x∫ ⎜−πy2 ⎟0 1 ⎝ r ⎠zz(66)dondeS max= subsidencia máxima calculada a partir de la relaciónSmax = −ama = factor de subsidenciam = potencia extraídar z= radio de influencia en el horizonte zLa subsidencia en el punto P(0,0), en cualquier instante t, puede ser calculadahaciendo uso de la siguiente ecuación, que ha sido obtenida incorporando la relaciónexpresada en la ecuación 5 en la ecuación 66.f( t, , , , , ∆ ) ( t, , , , )S x x y y z t = S x x y y z −0 1 2 0 1 22⎛ uz ⎞ ⎛ u x ⎞z t f rz uz r uS xtxz z− exp⎜⎟ exp ⎜,0, y1, y2,z⎝ 4 ⎠ ⎝ r ⎠⎟ ⎛⎜⎝+ 2 +⎞⎟ +π π 2π⎠( t, 0, 1, 2, )[ 1 exp( ∆ )]f+ ∆S x x y y z − −c tz(67)dondeuzS f= subsidencia final (asintótica) en el instante tv = velocidad de avance del frentec z= coeficiente de tiempo en el horizonte z∆t = tiempo transcurrido desde el término de laexcavaciónu z= parámetro calculado a partir de la relación:czrz= −v(68)La ecuación 67 permite distinguir las siguientes tres etapas en el proceso dedesarrollo de la subsidencia:- Subsidencia desarrollada durante el avance del frente a velocidad constante,representada por los primeros dos términos.- Subsidencia desarrollada después que el frente se ha detenido, hasta que sealcanza el hundimiento máximo local, que está representada por los trestérminos.- Subsidencia final (asintótica), representada únicamente por el primer término dela ecuación.67
äæçðãLos cálculos para la primera etapa pueden llevarse a cabo de acuerdo con elsiguiente esquema:dondezft( ) ( ) , ⎟ S ( A′)S A = S A − f ⎛ u x z⎝ ⎜ ⎞r ⎠- f u x 2⎛ ⎞t⎛ uz ⎞ ⎛ uz x ⎞t⎜ z, ⎟ = exp⎜⎟ exp⎜⎟ ;⎝ r ⎠ ⎝ 4π ⎠ ⎝ r ⎠zzf(69)- el área de la explotación A ′ se traslada respecto al contorno real de laexplotación A, como se recoge en la figura 25;- la magnitud de la traslación es r u z z2π ; y- la traslación se realiza en el sentido contrario al avance del frente.çè%àäåØéëêTì*íπéëê%ìîíπã¦Öã ÕÕ ãπïTéëê%ìîíÞ¡ß'à¬áàâä ×ð:ñðjñò”ó”ôeõ#ö”÷ ø¡ò ô¥õ¦¢ÿ õ”úñû”ù~ü”ý”ÿ¡Môeý”õ~ü”ý~ý&J(”ÿ &£lõ”ú£ñû”ùUtilizando las relaciones presentadas en las ecuaciones 10 y 11, el desarrollo de lasubsidencia en el tiempo ha sido calculado para un caso hipotético, cuyos resultados serecogen en la figura 26.68
Subsidencia Inicial Subsidencia Principal Subsidencia Residual0.0S(t)/S 0-0.5-1.0∆t=r/v+1/c-30 0 30 6090Tiempo (días)ðjñò”ó”ôeõ#!"”÷ øTó ý¦¢£õ”ô¥ô¨ ”ÿ ÿ £lý¦§#¦ ”ô¥õ”ÿ£ü”ý~ÿ õ#¢£ó¦¥¦¢ñ ü”ý”ù”ú£ñõ~ý”ù~ó”ù”õ~ý&JT”ÿ &£lõ”ú£ñû”ù#”ñ ¦ &£'&£lñ ú£õ#¦ ”ô¡£lõ&ô ~ÿ õ”ôeò¦Fases de la SubsidenciaEl desarrollo de la subsidencia en un punto de la superficie del terreno operteneciente a cualquiera de los horizontes del macizo rocoso situado por encima de laexplotación, puede dividirse en tres grandes fases:I- subsidencia inicial: se extiende desde el comienzo de la explotación hasta queel frente de extracción pasa por debajo del punto estudiado.II- subsidencia principal: sigue a la fase I, y se extiende durante un intervalo ∆tque depende de la velocidad de extracción v, del radio de influencia r y delcoeficiente de tiempo c.r∆t ≅ v+ 1 c(70)III- subsidencia final (residual): sigue a la fase II y finaliza cuando el puntoalcanza la subsidencia final o asintótica.Estas tres fases del proceso de subsidencia están presentes en la figura 26. De estafigura, se puede observar fácilmente que la velocidad de subsidencia máxima puede seraproximada mediante la expresión:õS maxSo=r 1+v cSo= vvr +c(71)Para c = ∞ , es decir, cuando no existe demora en el proceso de subsidencia, laecuación anterior se transforma en:69
öS max=Sor v(72)Por otro lado, si la subsidencia sobre el frente de extracción S res inferior al 10%de la subsidencia final S 0, es decir Sr S0 < 0, 1, entonces la subsidencia en cualquierinstante t puede aproximarse por la ecuación:( )−c( t−∆t0)( 1 ) ; para ( ∆ , )S t = S − e t ∈ t ∞0 0(73)dondet = tiempo transcurrido desde el momento en que elfrente de extracción pasa por debajo del puntoestudiado∆t 0= factor corrector de tiempo debido al efecto de bordeexistente en el frente de extracción, que crea unademora adicional en el proceso de subsidenciaLa ecuación anterior describe de forma bastante precisa las fases II y III delfenómeno de subsidencia, es decir, aproximadamente el 90% de la subsidencia.Cabe destacar, para finalizar este apartado, que la mayor dificultad que seencuentra al intentar predecir de forma precisa la subsidencia, es la evaluación de lasubsidencia final S 0y el coeficiente de tiempo c. La subsidencia final puede calcularsede forma precisa mediante el uso del método de la función de influencia, si losparámetros empleados en el modelo se establecen adecuadamente para cada caso apartir de datos sobre la subsidencia medida en la zona.En este trabajo, para la inclusión del factor temporal en el modelo propuesto sehará uso de la expresión recogida en la ecuación 63. Esta refleja, como se ha visto,todas las aportaciones realizadas a lo largo de los años al estudio de la influencia deltiempo en el fenómeno de la subsidencia.70
Ž6‘“’;”6•—–6˜šš:›Ÿ 2”6;£÷‘Žo;©—ªø‘œ“‘£¥ù ”6œž;Ž6«6‘ ¨ž¢o Ÿ“ª ”6ù Žoª—Ž6‘ ú¢—Ÿ¤;ª—”6Ÿ“–
š@,3-:4šoAÅ=?>8@BAÅ4
Para resolver este problema, se puede adquirir un mayor conocimiento delfuncionamiento interno de la función de influencia o explotar el que ya tenemos. Si lafunción objetivo resultase ser continua y diferenciable, se pueden emplear técnicas dedescenso basadas en el gradiente de la función de coste.Si esto no es aconsejable, como en este caso, por tratarse de una función cuyodominio de definición incluye los puntos de control (tres coordenadas y eldesplazamiento vertical) y los elementos de volumen extraídos (tres coordenadas de sucentro de gravedad, potencia efectiva y zona explotada a la que pertenece), siendo lafunción resultante muy sensible a pequeños cambios en los valores de estas variables, loque la hace mutimodal (rugosa). Otra alternativa sería recurrir a la fuerza bruta yproceder a enumerar la totalidad del espacio de búsqueda. Pero con el número deposibilidades creciendo de forma exponencial con el número de valores a determinar,esto se hace inabordable incluso para conjuntos de parámetros pequeños.Es importante señalar, que la optimización planteada pretende seleccionar unoperador:f:4np + 5nc 7nz→donde n pes el número de puntos de control situados en la superficie afectada, n ces elnúmero de elementos que componen el modelo de la explotación y n zes el número dezonas explotadas diferentes dentro de las labores subterráneas.Este operador, del que se pretende encontrar la mejor estimación, no debeconfundirse con la propia función de influencia:ng z¡7→ :¡A la vista de esto, los matemáticos han desarrollado teorías para determinadostipos de problemas que conducen a procesos de optimización específicos. Estos métodosfuncionan bien, siempre y cuando la función evaluada reúna todos los requisitosexigidos por cada uno de ellos.Todos los métodos deterministas mencionados hasta ahora, no manejan elconcepto de deterioro intermedio, por lo que la búsqueda finaliza cuando se dejan deproducir mejoras. En un entorno multimodal, como el estudiado en este trabajo, estosalgoritmos plantean descensos monótonos desde sus puntos de arranque respectivos, porlo que, únicamente pueden converger hacia un óptimo local.El método Newton-Raphson puede incluso diverger si se produce una ciertadiscrepancia entre su modelo interno y la realidad. Por supuesto, estos métodos resultaninmejorables si la tarea abordada cumple todas las condiciones impuestas. Sin tener encuenta las derivadas, los métodos poliédricos, la búsqueda de patrones y la búsqueda73
por rotación de coordenadas deben ser mencionados aquí, ya que constituyen unosalgoritmos muy robustos para la optimización no lineal (Schwefel [64]).Generalmente, en los problemas técnicos de optimización es muy difícil definir deforma explicita la función objetivo. Es necesario recurrir a un modelo de simulacióncon el fin de captar la realidad. Incluso, en este caso no se debe esperar que el procesose comporte de forma continua, por lo tanto, las derivadas no existen. Por esto, se handesarrollado los algoritmos de optimización que manejan funciones mal planteadas. Sinembargo, el aumento de la aplicabilidad de estos algoritmos tiene un coste elevado en lavelocidad de convergencia, comparados con los algoritmos especialmente diseñadospara la tarea encomendada. Más aun, ya no existe la garantía de poder encontrar elóptimo global de la función objetivo.En un intento de crear herramientas con distintos fines, la humanidad ha copiado,más instintivamente que de forma genial, las soluciones inventadas por la naturaleza.Hoy en día, se puede probar que en algunos casos determinadas formas o estructuras nosólo están bien adaptadas a su entorno, sino que han alcanzado su óptimo (Rosen [40]).Esto es debido a que las leyes de la naturaleza han permanecido estables durante losúltimos 3.500 millones de años. Por ejemplo, en los puntos de bifurcación de un sistemade vasos sanguíneos, la relación medida entre los diámetros de los vasos se acerca alóptimo teórico ( 2 − 1 3 ) indicado por las leyes de la dinámica de fluidos. Esto sólorepresenta, por supuesto, un punto de vista limitado de la naturaleza. En general, lanaturaleza realiza adaptaciones, no optimizaciones.La idea de imitar los principios básicos de los procesos naturales en losprocedimientos de búsqueda del óptimo se inicio hace más de tres décadas (Box [8],Fraser [9], Friedman [14], Bremermann [23], Holland [24]). Aunque estos algoritmoshabían demostrado ser herramientas de optimización robustas y directas, ha sidoúnicamente en los últimos cinco años cuando han captado la atención de losinvestigadores. Esto es debido a que mucha gente todavía ve la evolución orgánicacomo un gigantesco juego de dados; ignorando, por lo tanto, el hecho de que estemodelo evolutivo nunca podría haber funcionado: una célula humana contieneaproximadamente 50 genes, compuesto cada uno de ellos por 300 tripletes de basesnucleicas. A pesar de que las 4 bases existentes sólo codifican 20 aminoácidos15. 000. 000 19. 500.00diferentes, tendrían que evaluarse 20 ≈ 10 genotipos diferentes en sólo10 17 segundos, la edad de nuestro planeta. Por lo tanto, el simple hecho de tirar losdados no podría haber producido la diversidad de los complejos sistemas vivos actuales.De acuerdo con esto, la elección aleatoria de muestras en el espaciomultidimensional de los parámetros de la función objetivo, con el fin de obtener elóptimo global fracasará necesariamente (método de Monte-Carlo). Pero si consideramos74
la evolución como un proceso acumulativo, altamente selectivo, cuyos resultados pasande una selección a otra ligeramente modificados, entonces la asombrosa variedad yeficiencia existente en la Tierra no parece tan milagrosa. Cuando se construye unmodelo, el objetivo es aislar los mecanismos principales que han conducido al mundoactual y que, igualmente, han estado sometidos a evolución. Inevitablemente, lanaturaleza ha dado lugar a un mecanismo que permite a los individuos de unadeterminada especie intercambiar entre ellos porciones de su información genética(recombinación o cruce), de tal forma que puedan adaptarse lo mejor posible a lascondiciones cambiantes del entorno.Por otro lado, los algoritmos evolutivos se han ensayado ya en contextos muyvariados. En la Universidad de Illinois, se han desarrollado algoritmos que aprenden acontrolar una red ficticia de conducciones de gas, modelada sobre la red auténtica queconecta los centros productores del sudoeste de los Estados Unidos con losconsumidores del Nordeste. El complejo consta de muchas ramificaciones, quetransportan distintas cantidades de gas; los únicos elementos de gobierno soncompresores, que permiten aumentar la presión en cualquier rama de la red, y válvulas,que regulan el flujo de gas desde y hacia los tanques de almacenamiento. Dado elimportante desfase que separa la manipulación de las válvulas y compresores de loscambios reales de presión en las tuberías, no se dispone de soluciones analíticas delproblema y los controladores humanos, como le sucede al propio algoritmo han deaprender con la práctica. Su sistema no sólo atiende a la demanda de gas con costescomparativos a los conseguidos en la práctica, sino que ha desarrollado una jerarquía demeta-reglas capaces de dar respuesta adecuada a las perforaciones de las conducciones(lo que ocurre con frecuencia en la realidad por culpa de máquinas excavadorasdespistadas). Técnicas similares se han empleado para el diseño de redes decomunicaciones; en este caso los programas tratan de portar el máximo posible de datoscon un mínimo de líneas de transmisión y de conmutadores para interconectarlas.Investigadores de General Electric y del Instituto Politécnico Rensselaer hanaplicado un algoritmo evolutivo al diseño de una turbina polietápica de alta velocidad,como la de los motores que impulsan los aviones comerciales. Las turbinas -formadaspor una multitud de sistemas de álabes, estáticos unos y en veloz rotación los otros,alojados todos ellos en el interior de un conducto más o menos cilíndrico- constituyen elproblema central del desarrollo de motores, proyectos que pueden durar cinco años omás y llegar a consumir hasta 2000 millones de dólares.El diseño de una turbina comporta al menos cien variables, cada una de las cualestoma distintos intervalos de valores. El espacio de búsqueda resultante contiene más de10 387 puntos. La adecuación de la turbina depende de lo bien que cumpla un conjunto75
de unas 50 restricciones, entre las que se cuentan las formas suaves y lisas de susparedes interior y exterior o la presión, velocidad y turbulencia del flujo en diversospuntos del interior del cilindro. La evaluación de cada caso requiere hacer funcionar unasimulación de un motor durante unos 30 segundos en una estación informática paradiseño ingenieril.Un ingeniero, trabajando solo, suele tardar unas ocho semanas en conseguir undiseño satisfactorio. Los programas conocidos como sistemas expertos, que se valen dereglas de inferencia basadas en la experiencia técnica para pronosticar los efectos de uncambio en una o dos variables, pueden resultar muy útiles, pues orientan al diseñador enla búsqueda de modificaciones convenientes. Un segundo ingeniero, ayudándose de unode ellos, tardó menos de un día en proyectar un motor con doble número de mejoras queel diseño efectuado manualmente en ocho semanas.Pero los sistemas expertos se atascan pronto allí donde la consecución deulteriores progresos requiere modificar simultáneamente muchas variables. La razón deque existan tales puntos muertos es que resulta prácticamente imposible aislar yclasificar la totalidad de efectos asociados a diferentes cambios múltiples y, más aún,especificar las regiones del espacio de diseño en que continúa siendo válida laexperiencia previa.Para eludir estos puntos muertos, el proyectista ha de hallar nuevos elementos desolución. Aquí es donde interviene el algoritmo evolutivo. Proporcionándole como baseinicial las soluciones producidas por el sistema experto, una ingeniero tardó solos dosdías en hallar un diseño con tres veces más mejoras que la versión manual.En definitiva, con el uso de los algoritmos evolutivos se consigue una mejorasensible en la evaluación de los distintos parámetros empleados en la función deinfluencia. Hasta este momento, dicha evaluación se realizaba de una forma másimprecisa, mediante el uso de ábacos previamente establecidos para una determinadaexplotación y se asumía su validez para explotaciones de similares características. Conel método propuesto en este trabajo, como se verá, la determinación de estos parámetrosse realiza dinámicamente, siendo posible en cualquier momento la inclusión de puntosde control adicionales, que mejoran el proceso de cálculo implementado.76
./1±T-:4
Los algoritmos evolutivos, según la guía de la Computación Evolutiva de(Heitkoetter [135]), se pueden dividir en las siguientes clases:- Algoritmos Genéticos- Programación Evolutiva- Estrategias Evolutivas- Sistemas Clasificadores- Programación GenéticaEn el anexo de este trabajo se presentan brevemente cada una de estas técnicas.78
.o,3@B>;o>š/1±TA102.ÿš@A1@£¢64¤?46@BDF±T.¦¤?4De todos los algoritmos evolutivos estudiados, los empleados con más asiduidadpara la optimización de funciones son los algoritmos genéticos y las estrategiasevolutivas. Ambos presentan bastantes características comunes, aunque en el primercaso el proceso de aprendizaje tiene lugar al nivel de la población, mientras que en elsegundo se realiza al nivel de los parámetros o variables estratégicas.En este trabajo se han implementado los dos tipos de algoritmos, comprobandocomo se verá posteriormente, que el método que mejores resultados ofrece en este casoson las estrategias evolutivas, debido principalmente a la gran rugosidad de la superficiede respuesta. A continuación se presenta cada una de las implementaciones creadas.Algoritmo GenéticoGeneralmente un algoritmo genético hace uso de tres operaciones: selección,cruce y mutación. La selección está formulada a partir del principio darwiniano de lasupervivencia del mejor, las operaciones de cruce y mutación se han inspirado en losmecanismos de la mutación genética y la recombinación de cromosomas que puedenencontrarse en Biología. Su papel computacional es introducir diversidad en lapoblación de cromosomas para probar nuevas regiones no exploradas por el mecanismode selección.En este trabajo, cada cromosoma o individuo está constituido por un conjunto denúmeros enteros (genes) que representan los valores de los parámetros de la función deinfluencia. El tamaño de estos conjuntos varía según el número de zonas explotadas quese estudian y, también, con la expresión de la función de influencia empleada.Frente a la notación binaria tradicional empleada en la codificación de loscromosomas, más adecuada para el tratamiento de problemas combinatorios, en losproblemas de optimización paramétrica se hace uso de una notación en coma flotante.Sin embargo, el uso de esta notación se traduce en un espacio de búsqueda de lasolución considerablemente más grande. Por ello, para expresar el valor de cadaparámetro se ha empleado una notación de precisión fija, que permite al usuario delalgoritmo indicar el número de decimales con que desea obtener los valorescaracterísticos de dichos parámetros, así como el rango de valores que tendrá cada unode ellos.La selección de los individuos que posteriormente se emparejarán para producir lasiguiente generación, está basada en la adaptación de cada individuo al entorno que lerodea. En este caso, la adaptación de cada cromosoma es inversamente proporcional alerror cometido al calcular los desplazamientos verticales de los puntos de control,79
mediante la inserción en la función de influencia de los parámetros contenidos en dichocromosoma. Así la probabilidad de que un individuo sea seleccionado viene dada por laexpresión:pce=emax− e− ecmax min(75)donde e max y e min son el error máximo y mínimo cometidos durante la evaluación detodos los cromosomas que componen la población.De esta forma, al cromosoma con el máximo error le corresponde unaprobabilidad de supervivencia nula, mientras que el cromosoma con menor error tieneuna probabilidad unidad.Una vez determinada la probabilidad de supervivencia de toda la población seproduce la selección. Esta puede realizarse de varias formas (Goldberg [101]):- Ruleta: Este método se denomina así por su similitud con hacer girar un ruleta.En efecto, una ruleta imaginaria se construye asignando una porción a cada unode los individuos de la población, pero las porciones son de diferentes tamaños,permitiendo que algunos individuos tengan más posibilidades que otros de serseleccionados. Haciendo que el tamaño de la porción asignada a un determinadocromosoma sea proporcional a su probabilidad de supervivencia, se consigueque los individuos mejor adaptados tengan más oportunidades de serseleccionados para la reproducción. La ruleta se hace girar una vez por cadaindividuo que hace falta para el proceso de reproducción, esto permite quealgunos cromosomas sean elegidos más de una vez, mientras que otros no seescogen nunca.- Valor Esperado: Existe un problema potencial en el modelo anterior debido a sunaturaleza estocástica. En otras palabras, su carácter aleatorio permite quealgunos individuos sean seleccionados más (o menos) veces de las que su gradode adaptación merece. Para evitarlo, a cada individuo se le asigna un númeroentero que corresponde al número de veces que será seleccionado para lareproducción. Se define de esta forma el denominado AG canónico:ncpc=pc(76)donde n c es el número de veces que el cromosoma es seleccionado y p ces elvalor medio de la probabilidad de supervivencia previamente calculada.80
SelecciónCromosoma 1Cromosoma 2Cromosoma 3Cromosoma 4Cromosoma 1Cromosoma 2Cromosoma 2Cromosoma 4Generación ActualGeneración Intermediaðjñò”ó”ô¥õ#¦H”÷ øTI ô¥ý”õ”úñ û”ù~ü”ýÿ õ#¦ ¦¥”ÿõ”úñ ûù~ôeý¦”ô ”ü”ó”ú£ ñ+Üõ~ý”ù~ó”ùšÜ ú£õù”û”ù”ñ úUna vez creada la población de padres reproductivos, la selección de las parejasde cromosomas que recombinarán su material genético se realiza de forma aleatoria.Cada pareja seleccionada es eliminada de la población intermedia para que losindividuos no puedan ser elegidos de nuevo.En la bibliografía han sido propuestos diferentes esquemas heurísticos derecombinación o cruce, en aquellos casos donde se ha empleado una notación binariapara la codificación del problema. Así, dados dos padres, el cruce simple consiste enescoger aleatoriamente un punto de intersección e intercambiar las porciones situadas ala derecha de ese punto, obteniendo de esta forma dos descendientes como se observaen la figura 28.Padre AHijo ABPadre BHijo BAPunto de Intersección !"#$ %'&)(+*),-. /10*23 45*67 ,-. *Un segundo tipo de cruce, es el cruce doble. En este caso, se escogenaleatoriamente dos puntos del cromosoma y se intercambia el segmento comprendidoentre ellos, como se recoge en la figura 29. Así, el cruce simple puede considerarse uncaso especial de este en el que uno de los puntos de intersección está situado en uno delos extremos del cromosoma81
Padre AHijo ABPadre BHijo BAPunto de Intersección !"98$ %'&)(+*,-. /0*23 45*:3/;. *Una extensión natural de este modelo es el esquema de cruce multipunto donde seeligen varios puntos de intersección, como se recoge en la figura 30.Padre AHijo ABA...B...Padre B......Hijo BAB...A...Puntos de Intersección !*?.@A -BC@A/Por último, el cruce uniforme representa el caso extremo del esquema anterior, yaque en este caso se intercambian todas y cada una de las parejas de bit según unadeterminada probabilidad (Syswerda [104]).A pesar de las diferencias operacionales, una característica que tienen en comúntodas estas operaciones de cruce es que conservan los patrones comunes de los padres,permitiendo que los patrones buenos, que han sobrevivido al proceso de selección deuna generación a otra, se conserven mientras se siguen buscando nuevas posibilidadesmediante el cruce de las regiones no comunes a ambos. Brevemente, la operación decruce de cromosomas mantiene un adecuado equilibrio entre la explotación de lasregiones buenas ya conocidas y la exploraciones de nuevas regiones, donde se puedanencontrar mejores soluciones.Esta observación ha conducido a (Holland [56]) a la definición del concepto deesquema como cualquier tipo posible de patrón, o como hiperplanos en el espacio de lastiras de bits. Holland mantiene que los esquemas son entidades esencialmentefuncionales que son procesadas por los algoritmos genéticos.El teorema de los esquemas, revela que los subespacios con probabilidadessuperiores a la media son evaluados un número de veces que crece exponencialmentecon el tiempo, mientras los esquemas con probabilidades inferiores a la media seevalúan cada vez en menos ocasiones.82
Por lo que se refiere a la mutación, esta previene la pérdida permanente de undeterminado bit o alelo. Después de varias generaciones es posible que la selecciónconduzca a todos los bits de una determinada posición a un valor único: 0 ó 1. Si estoocurre sin que el algoritmo haya convergido hacia una solución satisfactoria, entoncesel algoritmo ha convergido prematuramente. Esto puede ser una gran problema cuandose trabaja con poblaciones pequeñas. Sin la operación de mutación, no existe laposibilidad de reintroducir el valor perdido del bit.La recombinación y la mutación pueden adoptar otras formas cuando loscromosomas no hacen uso de una representación binaria, como en este trabajo. Así, enel caso que estén constituidos por números enteros o reales existen varios tipos deoperadores:- Operadores Combinatorios:Media: se toma la media aritmética de dos de los genes paternos.Media Geométrica: se toma la raíz cuadrada de los productos de los dos valores.Extensión: se toma la diferencia de los dos valores, y se le suma al mayor o seresta del más pequeño.- Operadores Mutantes:Sustitución Aleatoria: se sustituye un valor por otro generado aleatoriamente.Ruido: se suma o resta al valor una pequeña cantidad obtenida aleatoriamente.Ruido Geométrico: se multiplica el valor por un valor aleatorio cercano a launidad.En los dos últimos casos, el número aleatorio puede presentar diferentes tipos dedistribuciones: uniforme dentro de un rango, exponencial, normal, binomial, etc.Una vez obtenida la población de hijos es necesario colocar cada uno de losnuevos individuos en la población existente. Para ello, se pueden emplear los siguientesmétodos:- Completa: La población de padres es sustituida totalmente por susdescendientes.- Al azar: Se escoge aleatoriamente un individuo de la población existente que essustituido por un descendiente, y se procede de igual forma hasta que se hanintroducido todos los hijos.- Por Superioridad: Sólo los descendientes cuyo error es menor que el máximoexistente en la población en cada momento son insertados, reemplazando alcromosoma peor adaptado.- Por Torneo: Se escogen aleatoriamente un determinado número (1 o más) depadres y se compara su error con el del individuo que tratamos de introducir en83
la población. Si el error de este es menor que el de alguno de los padres, sesustituyen uno por otro.- Por Similitud: Este método previene la convergencia prematura del algoritmo.Así, la probabilidad de que un individuo sea reemplazado por un cromosomahijo depende del grado de similitud que exista entre ellos. Escogido uno de losdescendientes se compara (bit a bit) con un grupo de padres elegidos al azar. Elque se parezca más al hijo es sustituido por este.Todas estas modelos de recombinación, mutación y selección han sido incluidosen el algoritmo genético desarrollado para este trabajo, denominado SubGa. Laselección de las distintas opciones se realiza desde un fichero de texto, como el que serecoge en el siguiente listado, que puede ser fácilmente modificado por el usuario con elfin de especificar la configuración del algoritmo que desee en cada momento:D# FCEL FCONTcuad.dat cont.dat# Dbg His N.Gen N.Cro MaxIter0 0 6 250 1# SaltoM Paso IterPaso10 10 5# E.Min MinV MaxV0.1 0.0 3.0# T. Sust.: 0-TOTAL 1-SUPER. 2-TORNEO 3-AZAR 4-SIMILITUD# T. Cruce: 0-1PUNTO 1-2PUNTO 2-UNIFORME# T. Comb.: 0-MEDIA 1-MGEOM 2-EXTENSION# T. Muta.: 0-SUST 1-RUDIO 2-RGEOM# T. Esca.: 0-SINESC 1-LINEAL 2-CUADRA.1 1 0 0 0# PCruce PMuta0.75 0.15# IterEnvej. IterCatac.0 10 E@A!0/1"9$ %' 45F* /0*G/-45 /B*9EH0*9.>- / !,!GI¨JKML7NEl contenido detallado de este fichero es el siguiente:- FCEL: Nombre del fichero que contiene los datos correspondientes a losmallados de las zonas explotadas. Su formato es el siguiente:D# NCEL NAREAn m# XCGM YCGM ZCGM POT AREAx 1 y 1 z 1 p 1 a 1x 2 y 2 z 2 p 2 a 2...x n y n z n p n a n E@A!)0/
- FCONT: Nombre del fichero que contiene los datos correspondientes a lospuntos de control o hitos. Su formato es el siguiente:D# NHITn# X Y Z DX DY DZx 1 y 1 z 1 dx 1 dy 1 dz 1x 2 y 2 z 2 dx 2 dy 2 dz 2...xn y n z n dx n dy n dz n E¦@A!0/S$ %' 4>F*9 /0*0!C@A/E4>/B. /E-BC@A/EH0*45/BC@A /.En primer lugar se presenta el número de puntos de control contenidos en elfichero. A continuación, para cada unos de los hitos se recogen sus coordenadasy los desplazamientos en el espacio.- DBG: Variable lógica (0/1) que desactiva/activa el modo de depuración delprograma, en el que se detalla cada uno de los pasos que se están realizando.- HIS: Variable lógica (0/1) que desactiva/activa la generación de histogramas enlos que se detalla las distribución de los individuos en cada generación según suadaptación y la probabilidad de supervivencia.- N.GEN.: Número de genes que componen cada cromosoma.- N.Cro: Número de cromosomas de cada población.- MaxIter: Número máximo de iteraciones que se ejecutará el proceso evolutivo.Para evitar el fenómeno de convergencia prematura se propone una técnicaespecífica, denominada cataclismo, que consiste básicamente en la búsqueda de unindividuo mejor adaptado mediante la mutación aleatoria del mejor de los individuosobtenidos hasta el momento. Si, después de un determinado número de mutaciones(IterPaso), no se obtiene mejora se disminuye el umbral de ruido en una cantidadprefijada (Paso). El valor inicial del umbral viene dado por el cociente MaxV/SaltoM.Se procede así de forma sucesiva hasta que se obtenga un individuo más adaptado o sealcance el mínimo prefijado del umbral de ruido. Si ocurriese esto último, el algoritmogenético se detiene.- E.Min: Error mínimo que se desea obtener, si durante la ejecución del programa,el error correspondiente a alguno de los cromosomas es inferior a este valor, elproceso se detiene.- MinV: Valor mínimo de los parámetros que se tratan de determinar.- MaxV: Valor máximo de los parámetros que se tratan de determinar.- T.Sust.: Tipo de sustitución que se lleva a cabo a la hora de insertar los nuevosindividuos en la generación precedente.- T.Cruce: Tipo de cruce que se emplea para obtener nuevos individuos a partir delos padres elegidos. Este mecanismo se emplea únicamente cuando losparámetros a determinar se denotan en formato binario.85
- T.Comb.: Tipo de combinación que se emplea para obtener nuevos individuoscuando los parámetros se almacenan en coma flotante.- T.Muta.: Tipo de mutación empleada.- T.Esca.: Tipo de escala que se aplica a la magnitud (error) que mide laadaptación de cada individuo o cromosoma a su entorno. Este operador permite,en cierta medida, la convergencia prematura del algoritmo- PCruce: Porcentaje de los individuos de cada generación que se combinan paradar lugar a nuevos cromosomas.- PMuta: Porcentaje de los cromosomas de cada población que son sometidos amutación para la introducción en el proceso evolutivo de nuevo materialgenético.- IterEnvej.: Número de iteraciones que un individuo se mantiene en el procesoevolutivo sin ver alterada su carga genética. Después de alcanzado este valor, sesustituye por un nuevo individuo obtenido de forma aleatoria.- IterCatac.: Número de iteraciones que han de transcurrir sin que el procesoevolutivo genere un individuo mejor adaptado, para que active el proceso decataclismo anteriormente expuesto.En el siguiente listado se recoge el código, en lenguaje C, de la rutina principaldel programa SubGa.{Poblacion P;if (LeeDatos ("gas.dat") != BIEN)exit (1);ImpDatos();IniAlea();IniPob (&P, Dat.nc);ErrPob (&P);GenHis (&P);while (Acabado(&P) == FALSO) {P.iter++;Recombina (&P);Muta (&P);Envejece (&P);ErrPob (&P);GenHis (&P);}if (Cataclismo (&P) == NOVALE)break;ImpVal (&(P.bc)); /* Impresión de los resultados */} D E@A!)0/T9$ %'U3C@A B!- B)45 -!.>0*.5-) / !,!GV¨WXZY7[El algoritmo genético desarrollado como núcleo del programa SubGa, permite nosólo la optimización de los parámetros de los que depende una determinada función,como es el caso presentado en este trabajo; sino también la resolución de problemas demaximización y minimización de una función de n variables. Para ello, se han86
implementado una serie de herramientas que facilitan la resolución de problemasgenéricos, lo que ha permitido además la verificación del algoritmo a partir de lasfunciones encontradas en la bibliografía y propuestas a tal efecto.Por otro lado, con el fin de acelerar el proceso de evaluación del error de cadacromosoma o conjunto de parámetros, se ha distribuido la etapa de integración de lafunción de influencia entre diferentes máquinas conectadas a través de una red decomunicación de ordenadores. Con ello se consigue que cada máquina evalúe undeterminado número de cromosomas simultáneamente, dependiendo de la carga quetenga en cada momento. Es decir, el programa SubGa durante la etapa de evaluación dela adaptación de cada cromosoma, envía una petición a la máquina que esté en esemomento disponible para que calcule el error que le corresponde a ese determinadoconjunto de parámetros.Esto ha exigido el desarrollo de un programa independiente o servidor, que seejecuta en cada una de los ordenadores de la red diseñados como servidores. Este es elencargado de realizar la integración de la función de influencia a partir de los modelosdigitales del terreno y de los parámetros definidos en cada una de las peticiones delproceso cliente. El programa gserver, una vez activado, se limita a escuchar undeterminado puerto (socket) definido previamente, por el que recibe las peticiones delprograma cliente. Esta petición consiste en una estructura de datos como la recogida enla figura 31. Una vez realizada la evaluación el servidor devuelve la misma estructurade datos, pero con el error del cromosoma debidamente actualizado.int idint num_pardouble errordouble par1double par2....double parN' !
se indican los valores de los distintos parámetros que caracterizan la función deinfluencia.En detalle, el proceso cliente-servidor comienza con la identificación de lasmáquinas que están ejecutando el programa gserver. El nombre de cada una de estasmáquinas, el número del puerto en el que se instalado el servidor y el número deprocesos que se pueden ejecutar simultáneamente se recogen en un fichero, como elpresentado en el siguiente listado.D# HOST SOCKET NPROCzeus 9994 4electra 9994 1metis 9994 1afrodita 9994 1 E@A!0/1_9$ %' 45F* /0* 0*BC@A`A 4>!45 RB10*.5- / !,!Gab9cdfeCc9dPara cada una de las entradas de este fichero, el cliente intenta establecer tantasconexiones como las reflejadas en la columna NPROC, para ello el servidor crea unacopia de si mismo que se encargará de las peticiones recibidas a través de cada una deestas conexiones.w5xlv5y{z5k iwnlojprqgserver 9994 gserver 9994gserver gserver gserver gserver gserver# HOST SOCKET NPROCzeus 9994 4electra 9994 1afrodita 9994 1metis 9994 1s5t k hlurihgservergservergserver 9994 gserver 9994h t h s ilvfwg'hjilk m 9 !
Una vez establecidas todas las conexiones posibles, el programa SubGa continuaejecutándose de forma normal hasta alcanzar la rutina ErrPob. En esta, se preparanahora cada una de las estructuras de datos correspondientes a las peticiones deevaluación de todos los cromosomas que componen la población.A continuación, comienza el dialogo cliente-servidor en el que se intenta quetodas las conexiones establecidas previamente acepten una petición diferente. Una vezrealizadas las primeras peticiones, comienza el proceso de escucha en el que se recogenlas peticiones procesadas por los servidores. Cada vez que se recibe una petición con elerror debidamente calculado se realiza una nueva petición. Este proceso se repite hastaque se han recibido todas las peticiones. Con esta implementación, cada uno de losconjuntos de parámetros puede ser evaluado por uno o más servidores, lo que permiteque el proceso de evaluación no se retrase si una determinada máquina se sobrecargacircunstancialmente. Si esto ocurriese, las peticiones procesadas por el servidorinstalado en ella se descartarían al estar evaluados con antelación por otro servidor.Con la distribución de la integración de la función de influencia en diferentesmáquinas se consigue una mejora considerable en los tiempos de cálculo. De hecho, lasmejoras conseguidas no son lineales, es decir, con cuatro servidores el proceso no tardacuatro veces menos sino que el tiempo empleado es algo mayor. Para la determinaciónde unos valores comparativos se ha empleado el siguiente problema:Número de Genes: 3Número de Cromosomas: 50Número de Iteraciones: 100Número de ServidoresDuración (min:seg)1 (zeus) 8:202 (zeus) 4:312 (zeus,afrodita) 4:363 (zeus) 3:133 (zeus, afrodita) 3:084 (zeus) 3:074 (zeus, afrodita) 2:314 (zeus, electra) 2:404 (zeus, afrodita, electra) 2:274 (zeus, afrodita, electra, metis) 1:415 (zeus, afrodita, electra, metis) 1:316 (zeus, afrodita, electra, metis) 1:307 (zeus, afrodita, electra, metis) 1:35|Z!;. !1\9$ %}|~ *,-/EH45/,-! !C@A^/E0**C(+*454> RB0*.5- / !,!GV¨W'X~Y7[89
Los resultados recogidos en la tabla 1 se han obtenido durante una día de trabajonormal de la red, es decir, con las máquinas dedicadas a otra serie de tareas y noexclusivamente a la ejecución del problema presentado. Por ello, los tiempos obtenidospueden verse afectados por la carga de trabajo de cada una de las máquinas en undeterminado instante. Los tiempos reflejados corresponden al mejor de los obtenidos encinco ejecuciones.Una vez implementado el algoritmo genético presentado anteriormente, se evaluósu comportamiento con datos reales. Con el fin de contrastar los resultados obtenidos sedesarrolló un nuevo programa basado, en este caso, en las estrategias evolutivas cuyofuncionamiento se detalla a continuación.Estrategia EvolutivaLas estrategias evolutivas (Rechenberg [53]), se han desarrollado paralelamente alos algoritmos genéticos, pero hasta la década de los 90 no ha habido contactos entre lasdos comunidades de investigadores. Estas estrategias están basadas en conjuntos devariables que toman valores reales con modificaciones normalmente distribuidas demedia cero. Las primeras aplicaciones experimentales en problemas de optimización serealizaron en la década de los 60 en la Universidad Técnica de Berlín. Allí se realizabanestudios hidrodinámicos donde se intentaba optimizar la forma de las tuberías acodadas.El algoritmo empleado en aquel caso era un sencillo esquema de mutación-selecciónque trabajaba sobre un único individuo, que producía un solo descendiente mediante unproceso de mutación. El mejor de los dos, padre e hijo, era seleccionadodeterminísticamente para sobrevivir hasta la siguiente generación.El programa SubEE, permite la realización de estrategias EE(µ+λ) y EE(µ,λ). Hasido desarrollado a partir de la estrategia evolutiva propuesta por (Schwefel [59,64]).En este modelo, µ vectores de parámetros (puntos de comprobación en el espacio debúsqueda) son utilizados para generar λ nuevos vectores mediante la aplicación decambios normalmente distribuidos. De estos, µ son empleados como puntos de origenen la siguiente generación (iteración). En ese mismo instante los parámetros o variablesestratégicos también se modifican. Estos últimos son en realidad los parámetros de lasdistribuciones normales de las longitudes de los ejes principales (desviaciones estándar= pasos) y la orientación angular del hiperelipsoide de mutación en el espacio debúsqueda n-dimensional. La selección se traduce en una adaptación de la topología localsi la relación λ/µ es lo suficientemente grande, generalmente superior a 5 ó 6.La variación aleatoria de los ángulos de inclinación del hiperelipsoide se consiguemediante la adición de números normalmente distribuidos, mientras que la modificaciónde los pasos se obtiene mediante su multiplicación por números aleatorios generadossegún una distribución log-normal.90
ƒDe forma analítica, las estrategias evolutivas son métodos de optimizaciónnparamétrica restringida o no de una función : objetivo f → y para problemas concondiciones adicionales g i≥ 0 . La finalidad de este proceso es encontrar un vectorxn* tal que ∀x ∈ f ( x ) ≤ f ( x∈€ )n : * si el fin es minimizar la función. El vector x*recibe el nombre de óptimo global.En general, las funciones objetivo no lineales presentan múltiples óptimos. Unmínimo local ‚x se define como:∃ ε > 0 ∀x∈( ) ( )„ „x − x < ε ⇒ f x ≤ f xnIncluso si existe un solo óptimo local, puede ser difícil encontrar un camino haciaél si la función presenta discontinuidades. Intentar garantizar una convergencia globaldel proceso conduce a una búsqueda más o menos exhaustiva del espacio paramétrico.(77)De esta forma, este método puede describirse como:0( µ λ ∆σ g∆σ ∆θ)EE = P , , , r, m, s, , , , f, g,T(78)donde0 0 0P = a1,..., aµ∈I( )µpoblaciónµ ∈… número de padres∈† λ número de descendientes, λ > µr:Iµ → Ioperador de recombinaciónm: I → Ioperador de mutacións:I→ Iλ µ∈‡ ∆σ∆σ g∈ˆ∈‰ ∆θn:Š Š f →g jnoperador de selecciónparámetro de control de los saltosparámetro de control de los saltosparámetro de control de la correlaciónfunción objetivo→ funciones restrictivas, { }‹j ∈ :‹ 1,..., qT: Iµ → { 0,1}criterio de terminacióndonde P 0 denota la población inicial de µ padres que da lugar a λ descendientes en cadageneración. ∆σ y ∆θ son parámetros que controlan la mutación de las variablesobjetivo x∈Œn. La información genética de un individuo ( , , )tres partes, el conjunto de las variables objetivo x ∈na = x σ θ ∈Iconsiste en, el conjunto de las desviacionesestándar σ n para la mutación de las variables objetivo x, y un vector de ángulos de∈Žθ ∈ w ; w = n n − 1 2 que se emplean para controlar las mutacionesinclinación ( )91
correladas de las variables objetivo x. Los dos últimos se denominan variables oparámetros estratégicos, ya que controlan los efectos del operador m para cadaindividuo.Una estrategia evolutiva trabaja de forma similar que un autómata abstracto queatraviesa secuencialmente un conjunto de estados (generaciones) hasta que se verificaun determinado criterio de terminación T. El término generación se refiere al lapso detiempo comprendido entre dos estados sucesivos y, también, a la población P t en elinstante t. Los λ descendientes se reducen a los µ padres de la siguiente generaciónmediante la aplicación del operador de selección s:tP+ 1= ′ts( P )( 1,...,λ )t( )t t tP′ = a′ a′ ∈It( , ∆σ g, ∆σ, ∆θ) ;j:j( k )ta′ = m r P ∀g ∈ g g a′ ≥ 0kλ(79)Un descendiente que no satisface todas las condiciones g j es simplementeignorado como una mutación letal. Cuando se realiza el proceso de selección basado enla supervivencia del mejor adaptado, el operador s se define de la siguiente forma:( ) ( )t+1t∀a ∈P ∄ a′ ∈ P′ : f a′ < f a(80)En este esquema de selección, el tiempo de vida de cada individuo de la poblaciónestá restringido a una sola generación (selección pura). Este tipo de estrategia evolutivaes la denominada EE(µ,λ), mientras que una variante de estas, que permite lasupervivencia indefinida de los padres gracias a su incorporación al proceso selectivo,se denomina estrategia elitista o EE(µ+λ).El operador de recombinación r se emplea para generar nuevos descendientesmediante la mezcla de la información contenida dentro de los diferentes individuos dela población. Pueden ser varios los esquemas de recombinación:t( ) ( , σ , θ )r P = a′ = x′ ′ ′ ∈I⎧xa,i⎪⎪xa, io xb,i⎪1xi′ = ⎨ 2 +⎪⎪xa, io xb i , i⎪1⎪2( xa, ixb,i)( xa, i+ xb i )i ,(A) no hay recombinación(B) discreta(C) intermedia(D) global, discreta(E) global, intermediatdonde, los índices a, b, b ∈Pdenotan padres que han sido escogidos con idénticaiprobabilidad por el operador r. Debe destacarse, que en la recombinación global los(81)92
padres progenitores de una componente x i ′ se escogen de forma individual para cadauna de ellas. Esto da como resultado una mezcla de la información genética mayor queen el caso normal (B):De forma análoga, se define la recombinación de los otros dos componentes decada individuo de la población: σ ′ y θ ′ . Este proceso es similar, de alguna forma, alcruce multipunto presentado para los algoritmos genéticos, lo que aumenta virtualmenteel espacio de búsqueda cubierta por la población.Los esquemas (A), (B) y (C) pueden encontrarse en la naturaleza cuando seobserva la reproducción asexual de las bacterias o la reproducción sexual de los seresvivos superiores. Sin embargo, los esquemas (D) y (E) son artificiales.El operador de mutación m supone la introducción de nueva información en lapoblación. Modifica de forma aleatoria tanto la información objetivo como lainformación estratégica contenida en cada individuo.( ) = ′ = ( ′, σ ′,θ ′)∈σ ′i= σi⋅ exp ( zg + N( 0, ∆σ ) ; zg = N( 0,∆σg)θ′ = θ ⋅ exp N( 0, ∆θ); j ∈ 1,...,wm a a x Ijj( ) { }{ }x′ = x + N( 0, A) ; i ∈ 1,...,niidonde, N(c,d) representa un número aleatorio independiente generado según unadistribución normal de varianza d 2 y media c. Por otro lado, N(0,A) denota un vector denúmeros aleatorios de valor medio 0 y densidad de probabilidad:det Ap( z)=n⋅ ⎛ 1 Texp⎜−z A z⎞⎟⎝ 2 ⎠( 2π)Los elementos diagonales de la matriz de covarianza A -12independientes σ ′ i(82)(83)son las varianzasde las componentes x idel vector de decisión x, mientras que elresto de los miembros de la matriz representan las covarianzas c i, j de los cambios.Schwefel restringe las áreas de igual densidad de probabilidad a hiperelipsoidesn-dimensionales, que están caracterizados por un conjunto de ángulos de inclinaciónθ ′ ∈w para los ejes principales del hiperelipsoide (Schwefel [59]). Las desviacionesestándar σ ′ iactúan como una especie de media de los saltos a lo largo de dichos ejes.σ ∈‘Existen, por lo tanto, dos parámetros que controlan la mutación de los saltosn . Por un lado, ∆σ gdenota un factor de escala común a todos los pasos, mientrasque ∆σ controla la variación individual de cada salto σ i.93
La introducción de los parámetros estratégicos: σ y θ en el proceso demutación-selección es una característica fundamental de las estrategias evolutivas. Estopermite que una población, con su conjunto de parámetros estratégicos, se adaptedinámicamente a la topología local de la función objetivo. En general, unos valoresadecuados de los parámetros estratégicos suponen una mejor adaptación del individuode acuerdo con f. Por tanto, la selección favorece automáticamente las mejoresconfiguraciones de estos parámetros. Se ha demostrado, (Schwefel [90]) que en elproceso de búsqueda directa de las estrategias evolutivas se utilizan pasos cercanos a losóptimos, lo que resulta en un mayor grado de convergencia. El efecto de las mutacionescorreladas se presenta en la figura 33, donde se esboza mediante el contorno de unaelipse un conjunto de mutaciones igualmente probables para un determinado individuo.La longitud de los ejes representa los diferentes valores de σ i. Con las mutacionessimples los ejes de las elipses son paralelos al sistema de coordenadas elegido, mientrasque en el caso de mutaciones correladas una elipse puede estar orientada libremente enel espacio, lo que supone una mejor adaptación a los angostos valles del espacio debúsqueda.Línea de igual probabilidad de generación de un descendiente ! /B*9EH45/ *. !0!9EH“0* *45F!•Por lo que se refiere a la implementación informática de este proceso, en elsiguiente listado se presentan las distintas opciones incluidas en el programa SubEE,estas se recogen en un fichero de preferencias configurable por el usuario.94
D# N.GenN.Padres N.Hijos TipoEE TipoRTipoM3 5 50 1 112 1# N.Pasos PasoMin PasoMax3 2 1# MaxIter MinError100 0.01# DS DI DP0.4083 0.5373 0.087266# N.Rang3# minv maxv ndec iniv0.00 2.00 3 -0.01 2.00 3 -0.00 5.00 3 - E@A!0/˜$ %' 45F* /0*- *C`A* *B45 !E0*.5- / !,G! V¨W'X¨De forma detallada, las opciones recogidas en este fichero son:- N.Gen: Número de variables o parámetros objetivo que definen cada uno de losindividuos de la población.- N.Padres: Número de individuos que componen cada una de las generaciones.- N.Hijos: Número de individuos que se obtienen por mutación y combinación apartir de los padres en cada iteración del algoritmo.- TipoEE: Tipo de estrategia evolutiva implementada [0: EE(µ,λ) 1: EE(µ+λ)].- TipoR: Tipo de recombinación que se realiza para cada una de las variables delproblema: variables objetivo, variables estratégicas y ángulos de inclinación.Cada dígito indica la recombinación a emplear para cada una de estas variables.0- Sin recombinación.1- Recombinación discreta de los padres, es decir, se coge uno u otroaleatoriamente.2- Recombinación intermedia, se obtiene la media aritmética.3- Recombinación discreta global, para cada gen del cromosoma se escoge unapareja de padres diferentes.4- Recombinación intermedia global.- TipoM: Tipo de mutación0- Mutación simple.1- Mutación correlada- N.Pasos: Número de variables estratégicas a emplear mayor que cero.- PasoMín: Valor mínimo de las variables estratégicas. Si durante su mutación,una variable estratégica alcanza un valor inferior al mínimo, este se sustituye porPasoMín.- PasoMáx: Valor máximo inicial de las variables estratégicas. A cada una de lasvariables estratégicas se les asigna una valor inicial según una distribuciónuniforme entre 0 y PasoMáx.95
- MaxIter: Número máximo de iteraciones o generaciones que se van a considerar.Si el proceso alcanza esta iteración sin conseguir un error inferior al umbralexigido, el proceso se detiene.- MinError: Error mínimo que se desea obtener con el proceso de optimización.- DS: La mutación de las variables objetivo x i , está controlada por un conjunto dedesviaciones estándar o pasos σ i, que son mutados a su vez antes de aplicarse alas variables objetivo.- DI: Desviación estándar de la distribución log-normal que se aplica a lasvariables estratégicas σ i.- DP: Desviación estándar de la distribución log-normal que se aplica a lasvariables estratégicas θ i.- N.Rang: Número de rangos especificados a continuación. Este número es menoro igual que el número de genes que componen cada individuo. Así, se puedeespecificar un único intervalo de valores para todos los parámetros que tratamosde determinar, o bien se pueden detallar estos intervalos individualmente.Para cada rango especificado se indican el valor máximo y mínimo delparámetro correspondiente, el número de decimales con que se va a trabajar encada caso y, por último, se recoge el valor inicial del parámetro. Si este últimocampo está vacío el gen se inicializa con un valor aleatorio comprendido en elrango. Se facilita de esta manera la ejecución del algoritmo desde un punto delespacio de búsqueda, obtenido con anterioridad, que no presente el error deseadoinicialmente.En el siguiente listado se recoge el código, en lenguaje C, de la rutina principaldel programa SubEE.{Poblacion P;IniAlea();if (LeeDatos ("subee.dat") != BIEN)exit (1);ImpDatos();IniCliente(Dat.nh);IniPob (&P);ErrPob (&P, PADRES);do {Muta (&P);ErrPob (&P, HIJOS);Selecciona (&P);ImpVal (P.vp, CIERTO);P.iter++;} while (!Acabado(&P));ImpVal (&P.bc, FALSO);return BIEN;} D E@A!)0/#9$ %'U3C@A B!- B)45 -!.>0*.5-) / !,!GV¨WX'¨96
Al igual que la implementación del algoritmo genético, presentado anteriormente,el programa SubEE hace uso de la técnica cliente-servidor para la realización de loscálculos involucrados en la evaluación de la adaptación al entorno de los individuos decada generación.97
šœ›ž Ÿ¢¡1›¤£1¥¦š¨§¦©žª«¥¦ª¦¥¦¬®¦¯§¦šœ¥Con el fin de evaluar el modelo de función de influencia propuesto, se harealizado un análisis del fenómeno mediante el uso de un programa comercial, basadoen el método de los elementos finitos. Se pretendía con esto realizar un análisiscomparativo de los resultados obtenidos que permitiese caracterizar las propiedades delmacizo rocoso sometido a la subsidencia y comprobar también la fiabilidad de losparámetros escogidos para el desarrollo del programa informático.Este planteamiento tiene gran interés en aquellos casos donde se realiza porprimera vez un estudio de la subsidencia. Así, será posible modelizar de una formagenérica el problema mediante el uso de un programa comercial, como el empleado eneste trabajo, para determinar posteriormente los parámetros que caracterizan el modelosegún la expresión de influencia propuesta. De esta forma, se consigue unaaproximación inicial a la cubeta de hundimiento que podrá corregirse más tarde amedida que se realiza el seguimiento de los movimientos del terreno afectado por laslabores subterráneas.El programa elegido para la realización de esta comprobación ha sidoCOSMOS/M ® , que es un sistema de elementos finitos completo, auto contenido ymodular desarrollado por Structural Research and Analysis Corporation. El programaincluye módulos para resolver problemas estructurales lineales y no lineales, estáticos ydinámicos, además incorpora módulos para la resolución de problemas de transferenciade calor, mecánica de fluidos, electromagnetismo y optimización estructural.En la tabla 2 se recogen los distintos módulos que constituyen COSMOS/M ® .MóduloSTARDSTARFSTARASTAROPTSTARNSTARHSTARFLOWSTARESTARTipo de AnálisisEstático LinealAmortiguamiento, Frecuencias y Modos PropiosFatigaDinámico Lineal AvanzadoOptimización EstructuralEstático y Dinámico No LinealTransferencia TérmicaDinámica de FluidosElectromagnetismo|~!;). !"$ %?R0. /EH0*.5- / !,!±°3²³V7´µ²³V{A´—·El sistema COSMOS/M ® consta de pre- y postprocesador, varios módulos deanálisis, entornos de trabajo, traductores y utilidades. El programa es completamentemodular, lo que permite al usuario cargar únicamente los módulos que necesite paracada problema.98
El programa pre- y postprocesador se denomina GEOSTAR. Es un modeladorgeométrico interactivo totalmente tridimensional, así como generador de mallados. Sinnecesidad de abandonar este módulo, el usuario puede crear la geometría del modelo,mallarlo, suministrar toda la información relacionada con el análisis, realizar el tipo deanálisis deseado y revisar e imprimir los resultados, tanto gráficos como numéricos.Teniendo esto en cuenta, se ha desarrollado en lenguaje C un pequeño programa,denominado gencmos, encargado de la generación de los ficheros de comandos para elprograma GEOSTAR, a partir de la geometría propuesta para cada modelo. Esteprograma se encarga también de la creación de los modelos digitales del terreno y laslabores subterráneas que se emplearán posteriormente en el programa SubEE para ladeterminación de los parámetros característicos de cada modelo.En las siguientes figuras se representa la geometría de cada uno de los tresproblemas estudiados con el programa COSMOS/M ® . En todos los casos, se hamodelado una única capa carbón de potencia 2 m., variando la longitud de la zonaexplotada. También se ha variado el ángulo que forma el terreno, supuesto plano, con lahorizontal así como el buzamiento de la capa.' !
' !
DC*C* Modelo de subsidencia planaC*C* a: 0C* b: 0C* h: 50C* p: 2C* w: 15C*VIEW,0.0,0.0,1.0CLS,1PLANE,Z,0.0,1EGROUP,1,TRIANG,,,2,,5CURDEF,TIME,1,1,0,0.0,20,1.0MPROP,1,EX,1e8MPROP,1,DENS,200.0MPROP,1,NUXY,0.45MPROP,1,FRCANG,27.27MPROP,1,COHESN,100000.0MPROP,2,EX,5e7MPROP,2,DENS,175.0MPROP,2,NUXY,0.4MPROP,2,FRCANG,10.0MPROP,2,COHESN,10000.0PT,1,-50,-35.94,0.0PT,2,50,-35.94,0.0PT,3,-50,-2.6,0.0PT,4,50,-2.6,0.0PT,5,-50,-0.6,0.0PT,6,50,-0.6,0.0PT,7,-50,50,0.0PT,8,50,50,0.0PT,9,-7.5,-2.6,0.0PT,10,7.5,-2.6,0.0PT,11,-7.5,-0.6,0.0PT,12,7.5,-0.6,0.0CRLINE,1,1,2CRLINE,2,2,4CRLINE,3,4,6CRLINE,4,8,6CRLINE,5,8,7CRLINE,6,7,5CRLINE,7,5,3CRLINE,8,1,3CRLINE,9,3,9CRLINE,10,9,10CRLINE,11,10,4CRLINE,12,5,11CRLINE,13,11,12CRLINE,14,12,6CRLINE,15,7,11CRLINE,16,8,12CRLINE,17,1,9CRLINE,18,2,10CRLINE,19,9,11CRLINE,20,10,12PARASSIGN,NEL,INTEGER,10CTNU,1,4,1,2*NEL,17,NEL,10,NEL,18,NELCTNU,2,3,8,NEL,9,NEL,17,NELCTNU,3,3,2,NEL,11,NEL,18,NELCTNU,4,4,7,1,9,NEL,19,1,12,NELCTNU,5,4,10,NEL,19,1,13,NEL,20,1CTNU,6,4,11,NEL,20,1,14,NEL,3,1CTNU,7,4,13,NEL,15,2*NEL,5,3*NEL,16,2*NELCTNU,8,3,6,NEL,12,NEL,15,2*NELCTNU,9,3,14,NEL,16,2*NEL,4,NELRG,1,1,1RG,2,1,2RG,3,1,3RG,4,1,4RG,5,1,5RG,6,1,6RG,7,1,7RG,8,1,8RG,9,1,9SCALEACTSET,EG,1ACTSET,MP,1MA_RG,1,3,1,2MA_RG,7,9,1,2ACTSET,MP,2MA_RG,4,4,1,2MA_RG,6,6,1,2NMERGE,1,,1,0.0001,0,0DCR,2,UX,0.0,4,1DCR,6,UX,0.0,8,1DCR,1,UY,0.0,1,1ACTSET,LC,1ACTSET,TC,1ACEL,0,-9.81,0TIMES,0,100,10NL_PRINT,10A_NONLINEAR,S,1,1,20,0.001,1,G,0R_NONLINEARLISTLOG,1,h11.pto,0NLISTLISTLOG,0,h11.ptoLISTLOG,1,h11.des,0DISLISTLISTLOG,0,h11.desLISTLOG,1,h11.str,0STRLISTLISTLOG,0,h11.strQUIT E@A!0/189$ %' 4>F* /0*45/BC@A /.>0*.5- / !,G!±Y³²³Vº}»3¼La ejecución de cada uno de estos ficheros de control permite no sólo la creaciónde la geometría básica de cada modelo, sino también el mallado, con elementostriangulares, de cada una de las regiones en las que se han dividido. Se especificaademás el tipo de análisis a realizar, que en este caso se trata de un análisis estático nolineal en deformación plana. El comportamiento de los elementos se ha supuestoelástico, perfectamente plástico, según el modelo Drucker-Prager, en el ámbito de laspequeñas deformaciones.Los mallados obtenidos en cada caso se recogen en la siguientes figuras,generadas a partir de los listados de elementos y nudos, creados por el programaGEOSTAR. Para facilitar su comparación, se presentan los tres casos con los mismosrangos de coordenadas tanto en el eje horizontal como en el vertical.101
200150100500-50-100-150 -100 -50 0 50 100 150 !
200150100500-50-100-150 -100 -50 0 50 100 150 !,/0*. /¸103
00.20.4compactacionsubsidencia sin compac.subsidencia con compac.0.60.811.2-100 -80 -60 -40 -20 0 20 40 60 80 100' !S9\$Ä%Å3B)0 , *BC@A/10*.¦@A* *B/*B1*.>,/0*. /¸ ¸00.050.10.15compactacionsubsidencia sin compac.subsidencia con compac.0.20.250.30.350.40.450.5-100 -80 -60 -40 -20 0 20 40 60 80 100' !S9"$Ä%Å3)B0 ,1 *BC@O/0*.¦@A*) *B/1*B*.>,/0)*. /1¸ ¸ ¸104
Posteriormente, se procedió a la determinación de los parámetros característicosde la función de influencia para cada uno de estos modelos. La función de influenciaempleada se recoge en la siguiente ecuación:∆w⎡ ρ−πm⋅aθ⋅∆A⎛ kθh, , = ⎢⎝e ⎜ ⎞⎠2+ nθ⋅e( kθh)⎢⎣( ρ θ h)2ρ⎟ −π⎛ 2⎝ ⎜ ⎞⎟2kθh⎠Sin embargo, debido al carácter bidimensional del problema analizado se hadescartado el comportamiento ortotrópico del material, es decir, los valorescaracterísticos de cada parámetro se suponen iguales en este estudio.a = a ; k = k ; n = nx y x y x yLos resultados obtenidos con el método de la función de influencia se recogen enlas siguientes figuras, donde se comparan con los calculados con el programaCOSMOS/M ® para los distintos modelos estudiados.⎤⎥⎥⎦(84)0.02subeecosmos0.0180.0160.0140.0120.010.0080.006-60 -40 -20 0 20 40 60 !S9 RB0* *E>.@A!0/E-! !*9.>,/0*. /¸45/B
0.240.22subeecosmos0.20.180.160.140.120.10.08-100 -80 -60 -40 -20 0 20 40 60 80 100 !S9S$ %23/,-! !4> RB0* *E5.@A!0/EH-! !*.5,/0*. /¸ ¸45/B/B
Los resultados conseguidos con el modelo escogido de la función de influencia noparecían demasiado satisfactorios, por lo que se introdujo un nuevo parámetro con el finde mejorar la adaptación del segundo término de la función a las variaciones observadasen los modelos. Así la función de influencia modificada queda de la forma:∆wa m ∆Akh, = ⋅ ⋅ ⎡ − ⎛ ⎝⎢e⎜ ⎞⎟⎠2+ n⋅e( kh)⎣⎢( ρ h)π ρ 2 2ρ−πb⎛⎜⎞⎟⎝ 2kh⎠donde b es el nuevo parámetro. Los resultados obtenidos con esta nueva expresión de lafunción de influencia fueron:⎤⎥⎦⎥(85)0.0190.018subeecosmos0.0170.0160.0150.0140.0130.0120.0110.010.009-60 -40 -20 0 20 40 60 !S9_$ %23/,-! !4> RB0* *E>.@A!0/E-! !*9.>,/0*. /¸45/BS-! Æ,G*C@A /E0.240.22subeecosmos0.20.180.160.140.120.10.08-100 -80 -60 -40 -20 0 20 40 60 80 100 !S9˜$ %23/,-! !4> RB0* *E5.@A!0/EH-! !*.5,/0*. /¸ ¸45/BS-! Æ,*C@A /E107
0.0160.015subeecosmos0.0140.0130.0120.0110.010.0090.0080.0070.0060.005-100 -80 -60 -40 -20 0 20 40 60 80 100 !S9#$ %23/,-! !45 RB0* *E5.@A!0/E-! !*.5,/0*. /¸ ¸ ¸4>/BS-! Æ,*C@A /EA la vista de esto, se observa como el modelo I, donde el terreno y la zonaexplotada son horizontales, queda perfectamente aproximado mediante el uso de lanueva función de influencia recogida en la ecuación 85. Sin embargo, en los otros dosmodelos se aprecia una ligera mejoría aunque esta es despreciable en el último caso. Enlas siguiente tablas se recogen los errores totales y máximos (acumulado en un solopunto de control) obtenidos con las dos expresiones de la función de influenciapresentadas anteriormente.Número de ParámetrosModelo 3 (ec. 84) 4 (ec. 85)I 0,017785 0,001210II 0,724150 0,685652III 0,055471 0,053379|Z!;. !
entre el elemento extraído y los puntos de la superficie. Así la nueva expresión de lafunción queda de la siguiente forma.∆wρm⋅a⋅∆A⎡ − ⎛ 2 2⎤⎝ kh, = ⎢e ⎜ ⎞⎟ −⎛⎜⎞⎟⎠⎝ ⎠2+ n⋅ e + c ⋅h⎥( kh)⎣⎢⎦⎥( h)ρπ ρ πb khdonde c es el quinto parámetro que se incluye en la función de influencia.Número de ParámetrosModelo 5 (ec. 86)II 0,118869III 0,001840(86)|Z!;. !1T9$ %'&¨ / *E7@A/C@A!. *EH*,-. *!B0/. !ÀB4> RB0* BCÀ. *B45 !45/BT-! Æ,G*C@A /ENúmero de ParámetrosModelo 5 (ec. 86)II 0,011760III 0,000280|Z!;. !_$ %'&¨ / *EH,GÆCP ,/E*,-. *!B0/. !ÀB45 RB0* BCÀ. *B4> !45/BT-! Æ,*C@A /EEn las siguientes figuras se presenta la comparación de los métodos evaluadospara los modelos II y III, ya que la inclusión del parámetro c en el modelo I no suponeuna mejora apreciable en la aproximación obtenida anteriormente.0.230.22subeecosmos0.210.20.190.180.170.160.15-100 -80 -60 -40 -20 0 20 40 60 80 100 !S98$ %23/,-! !4> RB0* *E5.@A!0/EH-! !*.5,/0*. /¸ ¸45/BT-! Æ,*C@A /E109
È0.0150.014subeecosmos0.0130.0120.0110.010.0090.0080.007-100 -80 -60 -40 -20 0 20 40 60 80 100 !T9=$ %23/,-! !45 RB0* *E5.@A!0/E-! !*.5,/0*. /¸ ¸ ¸4>/BT-! Æ,*C@A /EModelo Número de Parámetros Porcentaje de Ajuste3 100,00I 4 6,805 -3 100,00II 4 94,685 16,413 100,00III 4 96,235 3,32|Z!;. !˜9$ %'?G*C(+/ !E-/9 45*BC@A!9. *E45/BE5* 0!EE5*Ç9B*.5BÇ,* /0*G-! Æ9,*C@A /EComo valor de referencia, para la construcción de esta tabla, se toman los errorestotales obtenidos para cada modelo mediante la aplicación de la expresión de la funciónde influencia con tres parámetros. Los errores obtenidos con las otras expresiones deesta función se expresan respecto a aquellos.Para conseguir todos estos resultados, ha sido necesario ejecutar el programaSubEE una número suficiente de veces (hasta 10 veces para el modelo II, donde laaproximación no fue tan buena como en los otros dos modelos) con el fin de obtener elóptimo global de la función de error. Esto es debido a que dicha función presenta unahipersuperficie rugosa È de 5 → , con varios mínimos locales que dificultan labúsqueda del óptimo. Dada la imposibilidad de representar una superficie de estenúmero de dimensiones, se representan únicamente las variedades unidimensionales queunen los diferentes óptimos encontrados en las ejecuciones realizadas.110
El caso presentado a continuación corresponde a tres óptimos obtenidos para elmodelo III. Los valores correspondientes a los parámetros en cada uno de estos puntosse recogen en la siguiente tabla.Punto a k n b c Error TotalP 4,32584 1,06592 -2,62521 0,05638 0,02821 0,001840Q 1,51560 0,82830 -3,84050 -0,00410 0,04910 0,001898R 1,43066 1,01077 1,72276 1,31735 0,01609 0,042662|Z!;. !#9$Ä%'É-C@A ,/EH/;C@O*B 0/EH-! !*.>,/0)*. /1¸ ¸ ¸Como se observa en la tabla anterior, no sólo existen diferentes óptimos para cadamodelo evaluado, sino que estos pueden tener errores totales similares (puntos P y Q)pero con valores de los parámetros muy alejados entre si.Así, en las siguientes figuras se recoge el error total obtenido para el modelo IIIen función del parámetro t que caracteriza cada una de las variedades unidimensionales,según las ecuaciones paramétricas:( )( )( )Ê Ê Ê ÊS = P + t ⋅ Q − PÊ Ê Ê ÊS = P + t ⋅ R − PÊ Ê Ê ÊS = R + t ⋅ Q − Rdonde ËS es el vector de posición de un punto genérico de la correspondiente variedadunidimensional. En las tres figuras, se puede apreciar claramente la presencia de losdiferentes óptimos encontrados en este estudio.0.35(87)0.30.250.20.150.10.050-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 !T\$ %&¨ / >|Z/C@A!.5!. /. ! /0*. !¥^Q! *0!0B 0 ,*BE5 /B!.5̨%Í111
1.81.61.41.210.80.60.40.20-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 9 !T9"$ %'&¨ / }|~/C@A!.>!. /. ! /0*. !^Q! *0!0B 0 ,*BE> /B!.5Ì7%U0.60.50.40.30.20.10-0.2 0 0.2 0.4 0.6 0.8 1 1.2' !T9
( ) ( )Î Ï ÏÎ Î ÎS = P + t ⋅ Q − P + u⋅ R − P(88)donde ÐS es el vector de posición de un punto genérico de la correspondiente variedadbidimensional.1.510.501-1-0.500.5100.5' !T9S$ %'&¨ / >|Z/C@A!.>!. /. ! /10*. !^! *0!0; 0 ,*BE> /B!.>̨ÍU10.50-1 -0.5 0 0.5 1DÑE>/C^Q!. / *E0*.>&¨ / '*B. !^Q! *0!0; 0 ,*BE5 /B!.>̨ÍUB*!E0*¸ !TT$ %Por lo que se refiere a los desplazamientos horizontales, los resultados obtenidoscon el modelo propuesto en la bibliografía, presentado en la ecuación 59, no fueron tanpositivos como los obtenidos para los desplazamientos verticales. En las siguientesfiguras se comparan los desplazamientos horizontales para cada uno de los tres113
modelos, obtenidos haciendo uso de la última expresión de la función de influenciapropuesta.0.010.008subeecosmos0.0060.0040.0020-0.002-0.004-0.006-0.008-0.01-60 -40 -20 0 20 40 60' !T9_$ %'2Z/,-! !45 RB0*0*E5-. !”>!, *BC@A/EF/ ”>/BC@A!. *EH-! !*.5,/0*. /¸0.2subeecosmos0.150.10.050-0.05-0.1-100 -80 -60 -40 -20 0 20 40 60 80 100' !T9˜$ %'23/,G-! !45 RB0*0*E5-. !”5!, *Bf@A/EF/ ”5/BC@A!. *E-! !*.5,/0*. /¸ ¸114
0.0080.006subeecosmos0.0040.0020-0.002-0.004-0.006-0.008-0.01-100 -80 -60 -40 -20 0 20 40 60 80 100' !T9#$ %'23/,-! !4> RB0*0*E>-. !”>!,G *BC@A/EF)/ ”5/BC@A!. *)E-! !*.5,/0*. /¸ ¸ ¸Estos gráficos parecían sugerir que la pendiente de la cubeta de hundimiento teníauna relación directa con los desplazamientos horizontales. Por tanto, se representaronlas pendientes de cada modelo frente a los desplazamientos horizontales obtenidos conCOSMOS/M ® , como se observa en los siguientes gráficos.0.0040.003subeecosmos0.0020.0010-0.001-0.002-0.003-0.004-60 -40 -20 0 20 40 60 9 !T98$ %'2Z/,-! !45 RB0*-*B0 *BC@A*)E-! !*.5,/0*. /1¸115
0.030.025subeecosmos0.020.0150.010.0050-0.005-0.01-0.015-0.02-100 -80 -60 -40 -20 0 20 40 60 80 100 9 !_9=$ %'2Z/,-! !4> RB0*-*B0 *BC@A*EH-! !*.>,/0*. /1¸ ¸0.0030.0025subeecosmos0.0020.00150.0010.00050-0.0005-0.001-0.0015-0.002-100 -80 -60 -40 -20 0 20 40 60 80 100 9 !_9\$ %'23/,-! !4> RB0*1-*B0 *BC@O*E-! !*.>,/0*. /¸ ¸Ä¸La aproximación mejoró sensiblemente, pero fue necesario afectar la pendientecalculada de un coeficiente corrector que varía de un modelo a otro. Un valor inicial deeste parámetro puede ser el cociente entre el desplazamiento máximo y la pendientemáxima. En la siguiente tabla se recogen estos valores, así como su cociente.Modelo Pendiente Máxima Despl. Máximo Factor CorrectorI 0,000277257 0,003214 11,59 (11,4)II 0,00178927 0,025015 13,98 (23,2)III 0,000119789 0,002664 22,24 (23,6)|ZÒÓÔ ÒÕÖ ×Ø3ÙÚCÛAÜ Ý>Ü ÚÞCßAÚÝ5ÙààÚݦßAÙàáÚÔ ÒâÚ9ÞáÜ ÚÞCßAÚâÒàÒÝ>Ò9áÒãÙáÚÔ Ù116
En la última columna, entre paréntesis, se recoge el valor óptimo del factorcorrector. Este factor se ha obtenido mediante una búsqueda lineal que minimice lasuma de las diferencias entre los desplazamientos obtenidos con el programaCOSMOS/M ® y las pendientes multiplicadas por dicho factor.En las siguientes figuras pueden apreciarse los buenos resultados obtenidos conesta aproximación.0.0040.003subeecosmos0.0020.0010-0.001-0.002-0.003-0.004-60 -40 -20 0 20 40 60äÜ åæ9àÒç9èÖ ×'é3Úê5âÔ Òë5ÒãÜ ÚÞCßAÙêHÚêßAÜ ãÒáÙêâ)ÒàÒÚ)Ô5ãÙáÚÔ Ùì0.05subeecosmos0.040.030.020.010-0.01-0.02-100 -80 -60 -40 -20 0 20 40 60 80 100äÜ åæ9àÒç9íÖ ×'é3Úê5âÔ Òë5ÒãÜ ÚÞCßAÙêHÚê¦ßAÜ ãÒáÙêHâÒàÒÚÔ>ãÙáÚÔ Ùì ì117
0.0030.0025subeecosmos0.0020.00150.0010.00050-0.0005-0.001-0.0015-0.002-100 -80 -60 -40 -20 0 20 40 60 80 100äÜ åæ9àÒç9îÖ ×'é3Úê5âÔ Òë>ÒãÜ ÚÞCßOÙêÚê¦ßAÜ ãÒáÙêHâÒàÒÚÔ>ãÙáÚÔ Ù1ì ì ìComo resultado de este estudio comparativo se pueden extraer las siguientesconclusiones:Con el fin de mejorar la adaptación de los términos exponenciales de la funciónde influencia, se incluye un nuevo parámetro que afecta al exponente del segundotérmino de la función, lo que mejora considerablemente la aproximación.La función de influencia debe ser modificada, también, para tener en cuenta losefectos que sobre la subsidencia tienen la inclinación relativa entre la superficie delterreno y la explotación. Esto se traduce en la inclusión de un nuevo término linealdependiente de la distancia existente entre la superficie y las labores subterráneas.Si se tiene en cuenta, además, el comportamiento anisotrópico del macizo rocosoen un caso genérico tridimensional, es necesario introducir una cierta variabilidad de losparámetros. Para ello se recurre a la definición de los valores característicos de cadaparámetro como se ha visto anteriormente, figura 23.De esta forma la expresión definitiva de la función de influencia queda de lasiguiente forma:(89)118
ï¦ð¢ñ£ò¦ó¨ï¦óœòôžõöð¢÷ø¦óœùò¦ó¨ïUna vez implementados los dos algoritmos evolutivos se comprobó que laestrategia evolutiva era el método que mejor se adaptaba al problema de optimizaciónpresentado en este trabajo.A continuación se presentan los resultados obtenidos con el programa SubEEpara distintos modelos de la función de influencia. En los siguientes listados se recogenlos datos que definen el problema evaluado.# NHIT25# X Y Z DX DY DZ301.841 868.966 257.657 -0.009 0.041 0.006580.591 1020.112 248.995 0.006 -0.035 0.055698.080 832.693 290.504 0.018 0.070 0.008727.510 763.469 328.031 -0.002 0.078 0.007763.451 787.956 298.164 -0.002 0.060 0.011763.451 787.956 259.880 -0.002 0.060 0.024680.004 1236.691 352.511 0.060 -0.286 0.347749.681 1135.582 296.968 -0.036 -0.165 0.129790.027 1101.983 283.180 -0.061 0.010 0.152938.613 857.299 251.849 -0.020 0.084 0.037994.287 774.175 253.817 -0.059 0.050 0.041855.578 1159.468 335.086 -0.081 -0.065 0.0991007.686 928.321 262.392 -0.024 -2.903 0.0471041.605 877.085 262.962 -0.054 0.014 0.0361052.812 844.344 259.729 -0.059 0.009 0.0381053.031 1120.311 333.596 -0.094 0.015 0.0831173.285 947.857 309.581 -0.061 0.034 0.0441190.277 922.184 305.811 -0.078 0.034 0.0451079.305 657.548 256.510 -0.012 100.028 0.002492.955 918.839 248.248 0.015 -0.002 0.019631.939 942.252 249.081 -0.036 -0.005 0.022853.107 985.575 250.897 -0.009 0.047 0.049957.368 1005.837 277.237 -0.066 0.037 0.062331.092 1256.239 291.379 100.029 -0.051 0.004523.752 1108.414 248.092 0.033 -0.092 0.108# NCEL AREA319 1600.# XCGM YCGM ZCGM POT ZONA980. 1300. -150.721458 0.867 1980. 1340. -168.148838 0.756 11020. 1300. -138.017816 0.846 11020. 1340. -157.348872 0.834 11060. 1300. -129.470350 0.738 11060. 1340. -143.125901 0.837 11060. 1380. -160.393203 0.807 11100. 1340. -133.437444 0.735 11100. 1380. -145.890973 0.845 11100. 1420. -161.940979 0.794 11140. 1380. -135.125212 0.736 11140. 1420. -147.552012 0.843 11140. 1460. -163.588601 0.784 11180. 1420. -137.289990 0.736 11180. 1460. -150.547344 0.847 11180. 1500. -166.384484 0.769 11220. 1460. -140.760443 0.737 11220. 1500. -154.560040 0.849 11260. 1460. -128.911058 0.734 11260. 1500. -139.564552 0.857 11260. 1540. -159.353321 0.818 11300. 1500. -132.276278 0.748 1260. 940. -179.078220 1.866 2260. 980. -<strong>213</strong>.384148 1.697 2300. 940. -178.834157 1.854 2860. 1100. -143.287493 1.557 2860. 1140. -163.276296 1.581 2860. 1180. -186.040427 1.680 2860. 1220. -211.632317 1.722 2860. 1260. -232.849412 1.491 2900. 980. -77.828505 1.375 2900. 1020. -88.906109 1.622 2900. 1060. -110.539275 1.592 2900. 1100. -130.842761 1.562 2900. 1140. -150.229235 1.561 2900. 1180. -170.498410 1.614 2900. 1220. -193.961013 1.708 2900. 1260. -219.684998 1.707 2940. 1020. -80.593251 1.397 2940. 1060. -96.558312 1.608 2940. 1100. -117.544617 1.589 2940. 1140. -137.401089 1.557 2940. 1180. -156.545808 1.556 2940. 1220. -177.891799 1.643 2940. 1260. -202.785155 1.710 2940. 1300. -226.723341 1.585 2980. 1060. -87.967566 1.388 2980. 1100. -103.104093 1.607 2980. 1140. -123.468740 1.589 2980. 1180. -143.070765 1.578 2980. 1220. -163.115930 1.599 2980. 1260. -185.858234 1.692 2980. 1300. -211.326682 1.735 2860. 940. -142.505784 1.540 3860. 980. -161.374992 1.529 3860. 1020. -182.132609 1.281 3860. 1060. -205.310041 1.308 3860. 1100. -226.966192 1.243 3900. 940. -136.761435 1.389 3900. 980. -150.920786 1.534 3900. 1020. -170.145450 1.564 3900. 1060. -191.403096 1.298 3900. 1100. -214.095360 1.300 3900. 1140. -233.170382 1.175 3940. 940. -129.572217 1.369 3940. 980. -139.097145 1.556 3940. 1020. -157.784932 1.542 3940. 1060. -177.472417 1.277 3940. 1100. -199.290752 1.307 3940. 1140. -221.878170 1.307 3980. 980. -131.976238 1.385 3980. 1020. -145.490283 1.537 3980. 1060. -163.777431 1.558 3980. 1100. -183.944690 1.297 3980. 1140. -206.<strong>213</strong>506 1.317 3980. 1180. -227.253854 1.242 31020. 1020. -133.384106 1.528 31020. 1060. -150.907676 1.530 31020. 1100. -169.195223 1.570 31020. 1140. -190.305023 1.318 31020. 1180. -<strong>213</strong>.709800 1.319 3Ü ê¦ßAÒáÙû9üÖ ×'äÜ Ý>ýÚàÙáÚâæÞCßAÙêáÚÝ5ÙÞCßAàÙÔ119
ú300. 980. -212.779533 1.692 2340. 940. -178.049036 1.819 2340. 980. -211.014235 1.688 2340. 1020. -233.466524 1.444 2380. 940. -176.201199 1.739 2380. 980. -206.957659 1.678 2380. 1020. -231.257785 1.505 2420. 940. -171.400579 1.681 2420. 980. -200.017456 1.686 2420. 1020. -227.007354 1.612 2460. 900. -136.447388 1.643 2460. 940. -162.933307 1.653 2460. 980. -190.578349 1.693 2460. 1020. -219.244225 1.694 2500. 900. -127.868687 1.634 2500. 940. -153.704566 1.634 2500. 980. -180.434187 1.680 2500. 1020. -208.598112 1.704 2500. 1060. -231.943855 1.495 2540. 900. -119.089281 1.627 2540. 940. -144.293014 1.628 2540. 980. -169.958561 1.653 2540. 1020. -197.241722 1.698 2540. 1060. -224.476689 1.641 2580. 860. -84.169693 1.643 2580. 900. -109.970492 1.609 2580. 940. -134.688818 1.626 2580. 980. -159.949318 1.631 2580. 1020. -186.247434 1.672 2580. 1060. -<strong>213</strong>.507484 1.691 2580. 1100. -234.083302 1.447 2620. 860. -83.530878 1.434 2620. 900. -101.956297 1.575 2620. 940. -125.509437 1.604 2620. 980. -149.733519 1.623 2620. 1020. -174.499623 1.652 2620. 1060. -200.268275 1.681 2620. 1100. -225.238958 1.609 2660. 860. -83.350481 1.357 2660. 900. -94.233963 1.563 2660. 940. -116.225731 1.578 2660. 980. -138.720548 1.598 2660. 1020. -161.686782 1.619 2660. 1060. -186.123087 1.679 2660. 1100. -212.178810 1.698 2660. 1140. -233.188967 1.472 2700. 900. -85.662968 1.553 2700. 940. -106.615885 1.556 2700. 980. -127.813069 1.575 2700. 1020. -149.431701 1.585 2700. 1060. -171.997157 1.630 2700. 1100. -196.818267 1.695 2700. 1140. -222.257379 1.657 2740. 900. -81.524731 1.396 2740. 940. -96.683338 1.545 2740. 980. -116.669483 1.562 2740. 1020. -137.387538 1.585 2740. 1060. -158.729869 1.593 2740. 1100. -181.825091 1.662 2740. 1140. -207.114048 1.697 2740. 1180. -229.667859 1.535 2780. 900. -76.161970 1.364 2780. 940. -86.214954 1.553 2780. 980. -105.974166 1.537 2780. 1020. -126.054000 1.559 2780. 1060. -146.767022 1.568 2780. 1100. -168.237239 1.599 2780. 1140. -192.105372 1.672 2780. 1180. -217.859879 1.673 2820. 940. -79.320014 1.387 2820. 980. -94.491674 1.595 2820. 1020. -115.360320 1.558 2820. 1060. -135.557558 1.559 2820. 1100. -155.660156 1.569 2820. 1140. -177.505737 1.650 2820. 1180. -202.452920 1.715 2820. 1220. -226.531575 1.590 2860. 980. -87.138804 1.401 2860. 1020. -103.081342 1.591 2860. 1060. -123.534479 1.568 2980. 1340. -232.487311 1.497 21020. 1060. -76.803090 1.381 21020. 1100. -87.294066 1.624 21020. 1140. -108.019740 1.607 21020. 1180. -128.251151 1.595 21020. 1220. -148.160354 1.590 21020. 1260. -168.878883 1.636 21020. 1300. -192.246605 1.719 21020. 1340. -217.571887 1.734 21060. 1100. -77.503625 1.389 21060. 1140. -92.531303 1.605 21060. 1180. -113.085888 1.597 21060. 1220. -133.261005 1.589 21060. 1260. -153.271610 1.586 21060. 1300. -174.628809 1.645 21060. 1340. -193.738889 1.728 21100. 1140. -82.994291 1.386 21100. 1180. -97.900171 1.615 21100. 1220. -118.806199 1.590 21100. 1260. -138.826828 1.580 21100. 1300. -158.571777 1.601 21140. 1180. -88.517444 1.392 21140. 1220. -103.925669 1.619 21140. 1260. -124.415082 1.579 21140. 1300. -143.472013 1.564 21140. 1340. -160.578109 1.507 21180. 1220. -87.141540 1.664 21180. 1260. -109.157716 1.627 21180. 1300. -129.176284 1.565 21180. 1340. -147.181870 1.553 21180. 1380. -158.363169 1.520 21220. 1220. -78.150019 1.405 21220. 1260. -101.078810 1.404 21220. 1300. -122.004001 1.387 2420. 900. -227.258799 1.312 3460. 860. -188.636406 1.425 3460. 900. -221.245311 1.407 3500. 860. -179.953312 1.348 3500. 900. -210.819297 1.434 3540. 860. -171.188498 1.610 3540. 900. -199.214863 1.416 3540. 940. -227.939998 1.295 3580. 780. -131.769393 1.354 3580. 820. -141.950851 1.530 3580. 860. -162.563241 1.546 3580. 900. -187.943564 1.379 3580. 940. -218.518647 1.412 3620. 820. -134.667443 1.532 3620. 860. -154.566415 1.533 3620. 900. -177.538438 1.317 3620. 940. -205.786822 1.402 3620. 980. -231.018636 1.221 3660. 820. -131.568896 1.401 3660. 860. -146.944274 1.526 3660. 900. -167.691203 1.568 3660. 940. -193.145996 1.379 3660. 980. -221.6<strong>213</strong>44 1.354 3700. 820. -129.593289 1.357 3700. 860. -139.327645 1.526 3700. 900. -158.796356 1.527 3700. 940. -181.514889 1.321 3700. 980. -208.441533 1.372 3700. 1020. -231.692000 1.209 3740. 860. -131.947084 1.507 3740. 900. -150.669892 1.516 3740. 940. -170.573691 1.569 3740. 980. -194.366224 1.350 3740. 1020. -220.722367 1.347 3780. 860. -129.120055 1.388 3780. 900. -142.944831 1.503 3780. 940. -161.139797 1.508 3780. 980. -182.431354 1.292 3780. 1020. -207.479117 1.326 3780. 1060. -230.342711 1.221 3820. 900. -134.455028 1.518 3820. 940. -152.595276 1.513 3820. 980. -171.911778 1.564 3820. 1020. -194.661633 1.324 3820. 1060. -219.557648 1.332 3860. 900. -128.818452 1.381 31020. 1220. -233.268538 1.174 31060. 1020. -126.157746 1.376 31060. 1060. -138.564066 1.531 31060. 1100. -155.938325 1.530 31060. 1140. -175.073361 1.282 31060. 1180. -198.025773 1.348 31060. 1220. -222.619256 1.318 31100. 1060. -130.967207 1.376 31100. 1100. -143.241452 1.534 31100. 1140. -160.708265 1.551 31100. 1180. -181.091072 1.333 31100. 1220. -205.746191 1.397 31100. 1260. -228.749834 1.246 31140. 1100. -135.419595 1.374 31140. 1140. -147.562739 1.526 31140. 1180. -165.515624 1.561 31140. 1220. -187.403811 1.354 31140. 1260. -<strong>213</strong>.137424 1.396 31140. 1300. -233.692023 1.180 31180. 1140. -134.414038 1.549 31180. 1180. -152.001869 1.543 31180. 1220. -171.032356 1.607 31180. 1260. -193.751889 1.377 31180. 1300. -217.492487 1.381 31220. 1140. -125.041418 1.377 31220. 1180. -136.968492 1.574 31220. 1220. -163.170210 1.383 31220. 1260. -184.009848 1.127 31260. 1180. -120.321789 1.350 3580. 820. -150.414017 1.032 4580. 860. -167.266279 0.944 4620. 780. -133.486469 0.904 4620. 820. -143.616509 1.023 4620. 860. -162.726188 0.994 4660. 820. -135.916369 1.023 4660. 860. -156.182741 1.024 4700. 820. -133.354898 0.938 4700. 860. -148.916228 1.015 4700. 900. -166.039397 0.961 4740. 820. -132.071359 0.904 4740. 860. -141.489113 1.011 4740. 900. -160.165833 1.008 4780. 860. -133.148387 1.015 4780. 900. -152.037094 1.012 4780. 940. -167.376744 0.943 4820. 860. -128.026487 0.922 4820. 900. -142.338281 1.035 4820. 940. -160.909457 1.001 4860. 900. -136.817681 0.929 4860. 940. -151.498629 1.022 4860. 980. -167.159796 0.948 4900. 900. -130.238376 0.912 4900. 940. -140.364560 1.046 4900. 980. -159.856467 1.018 4940. 940. -133.539113 0.928 4940. 980. -148.679890 1.049 4940. 1020. -166.010073 0.967 4980. 980. -136.113946 1.047 4980. 1020. -156.305855 1.050 41020. 980. -128.644075 0.923 41020. 1020. -143.045366 1.052 41020. 1060. -161.308349 1.002 41060. 1020. -134.579865 0.923 41060. 1060. -148.723892 1.058 41060. 1100. -165.389517 0.967 41100. 1060. -139.827174 0.923 41100. 1100. -153.812182 1.054 41140. 1060. -129.996497 0.913 41140. 1100. -139.855941 1.046 41140. 1140. -158.929368 1.024 41180. 1100. -130.565824 0.923 41180. 1140. -144.841460 1.086 41180. 1180. -163.295376 0.991 41220. 1140. -134.047725 0.929 41220. 1180. -149.628383 1.103 41220. 1220. -167.008844 0.961 41260. 1180. -140.809366 0.938 41260. 1220. -162.906987 0.930 4Ü ê¦ßAÒáÙû9ûÖ ×'äÜ Ý>ýÚ9àÙáÚÝ5ÚÔ áÒêEn las siguientes figuras se presenta gráficamente la información contenida en loslistados anteriores.120
ä'Ü åæàÒç9þÖ ×'ÿ¨æÞCßAÙêáÚÝ>ÙÞCßAàÙÔ>áÚ9Ô>âàÙÓÔ ÚãÒÚ¡ QÒÔ æÒáÙä'Ü åæàÒç9çÖ ×£¢ÙáÚÔ ÙáÜ åÜßAÒÔ>áÚÔ ÒêHë5ÙÞÒêHÚ¡¤âÔ ÙCßAÒáÒê121
En este problema, como puede observarse en el listado de los elementos quedefinen las labores subterráneas, el número de zonas explotadas es cuatro. Esto hapermitido definir dos tipos de análisis claramente diferenciados:a) Las distintas zonas explotadas tienen los mismos parámetros, cuyo númerovaría desde 3 en el modelo primitivo, hasta 5 en el modelo propuesto en este trabajo. Ecada caso, es posible hablar de un comportamiento ortotrópico del macizo lo que setraduce en doble número de parámetros. Por lo tanto, los casos estudiados en esteapartado según el número de parámetros son: 3, 3x2, 4, 4x2, 5 y 5x2.b) Cada grupo de parámetros varía de una zona explotada a otra, lo que hasupuesto multiplicar por 4 el número de parámetros evaluados en cada uno de los casosvistos en el apartado anterior. Así, los casos estudiados en este apartado según elnúmero de parámetros son: 3x4, 3x2x4, 4x4, 4x2x4, 5x4 y 5x2x4.Los resultados obtenidos se recogen en la siguiente tabla:Número de parámetros Error mínimo3 0,8820923x2 0,7920173x4 0,4535803x2x4 0,3782114 0,8817554x2 0,7856864x4 0,4199334x2x4 0,3485995 0,8041975x2 0,7509515x4 0,5874015x2x4 0,245413Ò1û9üÖ ÚêÙÓCßAÚÞÜ áÙêHÝ5ÙÞÔ ÙêHãÙáÚÔ ÙêáÚÛAæÞÝ>ܨÞáÚÜ ÞCÛAÔ æÚÞÝ5Ü ÒâàÙâæÚêßAÙê¥ZÒÓÔ ×§¦¨ààÙàÚê7ßAÙCßAÒÔúZonas: 4número de parametros: 5x2Hitos: 25# X Y Z DZ_ESTIMADO DZ_MEDIDO301.841 868.966 257.657 -0.0091615065 ( 0.006)580.591 1020.112 248.995 0.0579244354 ( 0.055)698.080 832.693 290.504 0.0038587956 ( 0.008)727.510 763.469 328.031 0.0072702415 ( 0.007)763.451 787.956 298.164 0.0135698240 ( 0.011)763.451 787.956 259.880 0.0104603322 ( 0.024)680.004 1236.691 352.511 0.3468415952 ( 0.347)749.681 1135.582 296.968 0.1288593435 ( 0.129)1079.305 657.548 256.510 0.0020024617 ( 0.002)492.955 918.839 248.248 0.0190003024 ( 0.019)631.939 942.252 249.081 0.0285820369 ( 0.022)853.107 985.575 250.897 0.0489998980 ( 0.049)957.368 1005.837 277.237 0.0566825975 ( 0.062)331.092 1256.239 291.379 0.0087968922 ( 0.004)523.752 1108.414 248.092 0.0567230156 ( 0.108)---Error Total: 0.245413Error Max. : 0.080849Desp. Max. : 0.346842Ü ê¦ßAÒáÙû9èÖ ×£©3æÞáÜ ãÜ ÚÞCßOÙÚêßAÜ ãÒáÙÚÞÝ>ÒáÒýÜßAÙÝ>ÙÞþ¡¤Q衤îâÒàãÚCßAàÙê122
ù'÷ï ï¦ð¢ñ£òóœï¦ó¨ò õOtra de las aplicaciones donde el algoritmo presentado tiene gran interés, debido asu flexibilidad, es en la predicción de la subsidencia en un determinado instante detiempo a partir de los resultados obtenidos con anterioridad. Para ello, es necesariodisponer de datos sobre desplazamientos en los puntos de control correspondientes adiferentes instantes del fenómeno.Para la determinación de estos parámetros es necesario tener en cuenta que elmodelo de función de influencia propuesto no depende del tiempo, sino que permiteobtener la subsidencia final que se produciría si la explotación se detuviese en elmomento de tomar las medidas sobre el terreno, dado que la información disponible selimita a los desplazamientos de ciertos puntos del terreno en momento concretos.Esto exige la creación de un nuevo algoritmo evolutivo en el que la función aminimizar ya no es la diferencia de los desplazamientos estimados y los medidos, sinoque ahora se pretende inferir los parámetros que generan un desplazamiento en untiempo lejano de tal forma que la subsidencia calculada con estos parámetros en elmomento actual sea la más próxima posible a la deformación medida. Así, la expresiónque se trata de minimizar en este caso es la siguiente:mine( η −ki)M N*∑∑wki −kwkiwk = 1 i=1(90)donde M es el número de intervalos de tiempo en los que se conocen losdesplazamientos de los puntos de control, N es el número de hitos, w * kies la subsidenciamedida en el hito i en el instante k, η kes un coeficiente de asentamiento que varía de uneinstante a otro, w kies la subsidencia estimada mediante la función de influencia delpunto de control i en el instante k y w kies la velocidad de subsidencia en el instante ken el hito i definida a partir de las medidas tomadas en los instantes anteriores.De esta forma, es posible obtener 5x2xn z xM parámetros que caracterizan elmodelo temporal explícito en el tiempo que permite predecir el valor de la subsidenciaen un punto genérico de la superficie en cualquier instante de tiempo. Esta expresión dela subsidencia en el tiempo sería entonces:e( ρ, θ, ) η ( ρ, θ, ) ( ρ, θ,)w h = w h − w h(91)k k kObviamente, para que la implementación de este algoritmo sea posible esnecesario disponer de los correspondientes desplazamientos de los puntos de control encada instante de tiempo.k123
"!<strong>$#</strong>%&'(%)'(*+, -* *./0%2103 4 '5+687$'//0%& 9'(*:+6;0/ + /' 4 9,, 9-* 4 '5+ 6
äÜ åæà?çA@Ö ×§¢B¨)áæAC ÙêEDæÚÝ>ÙÞê¦ßAÜßAæ¡FÚÞBC ?Ü ãâGC ÚãÚÞCßH?)Ý5Ü ¨ÞÜ ÞfÛAÙàãBCßOÜ ÝI?El programa SUBSIB se ha desarrollado en lenguaje 'C/C++' sobre una estaciónde trabajo HP Apollo 720, siendo comprobado su correcto funcionamiento en unordenador personal bajo MS-DOS. Este programa permite determinar losdesplazamientos verticales, y horizontales, pendientes, curvaturas y las deformacionesunitarias de la superficie de terreno afectada por labores subterráneas. Está basado,como se presentó en el capítulo anterior, en el método de la función de influencia.El proceso consta fundamentalmente de los siguientes módulos:- DIGSUB: Introducción de los datos de partida.- PARSUB: Caracterización de los parámetros del problema.- CALSUB: Cálculo de la cubeta de hundimiento.- GENRES: Generación de los resultados gráficos y numéricos.El diagrama de flujo de la aplicación se presenta en la figura 67, en ella se puedeapreciar como los módulos que la componen se ejecutan secuencialmente, de forma quelos resultados de uno constituyen los datos de entrada del siguiente, pudiendo ejecutarvarias veces un mismo módulo sin necesidad de iniciar el proceso desde el primero deellos.A continuación, se describen brevemente cada uno de estos módulos, para detallarsu funcionamiento de forma individual más adelante.En el primer módulo, DIGSUB, se realiza la digitalización de las curvas de nivelcorrespondientes al terreno del que se desea conocer su hundimiento o subsidencia, y serepresentan también las labores subterráneas causantes del fenómeno. Por otro lado, sedigitalizan las plantas de las distintas construcciones situadas en la superficie cuyosposibles daños se pretende evaluar. Esta información se recopila a partir de los planostopográficos de la zona de interés, así como de los planos de labores de la explotación.El proceso de digitalización se realiza en una tableta de tamaño A0, sobre la quese colocan los diferentes planos, y se emplea para ello un programa comercial de DibujoAsistido por Computadora (DAC).125
Cada uno de los conjuntos de líneas digitalizadas se sitúa en un layer 5 diferente,dentro del entorno gráfico, lo que permite diferenciarlos de una forma cómoda. Seposibilita, de esta forma, el tratamiento individualizado de cada uno de estos conjuntosen las siguientes etapas del estudio.En la figura 68 se presenta la información preliminar digitalizada para un casoconcreto. Así, se pueden observar las líneas de nivel que definen la zona del terreno quese desea estudiar, los contornos de las construcciones que pueden resultar dañadas, lastrazas horizontales de las capas objeto del análisis (se identifican además, dentro decada capa, las distintas zonas explotadas, así como su potencia media). Esto se completacon toda la información auxiliar que el usuario considere adecuada para una fácilinterpretación de los gráficos como: ríos, carreteras, vías de tren, rejillas UTM, etc.äÜ åæà?çAJÖ ×ìÄÞCÛAÙàãB?)Ý5ܨ)ÞáÜ åÜßH?AC Ü ëK?)áA?ÚÞBC ?âàÜ ãÚàL?ÛH?ê>ÚToda esta información tiene carácter tridimensional y se maneja dentro delprograma SUBSID en formato vectorial, como se refleja en la figura 69 mediante unaperspectiva de la información presentada en la figura anterior. Todas las figuraspresentadas en este trabajo han sido creados dentro del entorno gráfico de la aplicación,en un formato apropiado para su inserción en el documento.5 El concepto de layer o capa es similar al concepto de transparencia empleado en muchasaplicaciones de diseño. El usuario puede asignar cualquier porción del dibujo a diferentes layers, ypuede definir el numéro de estos que necesite. Los layers permiten visualizar o imprimir distintosaspectos del dibujo de forma separada o combinados.126
ä'Ü åæà?ç9ÕÖ ×'ÿ¨Úàê5âÚÝßAÜ M?áÚBC ?Ü ÞCÛAÙàãB?Ý5ܨÞEste módulo se completa con la generación de los mallados o modelos digitalescorrespondientes a la superficie del terreno y a las labores subterráneas, que seemplearán en las etapas posteriores.El módulo PARSUB, es el encargado de la determinación de los parámetros quedefinen la función de influencia empleada en cada uno de los estudios. Para ello, esnecesario conocer los desplazamientos, verticales y horizontales, inducidos por laexplotación en un serie de puntos de control o hitos. Estos datos son evaluados por unalgoritmo genético que determina los valores de los parámetros más apropiados paracada caso, como se desprende de lo establecido en el capítulo anterior.El módulo CALSUB se encarga de la computación de los desplazamientosverticales y horizontales del terreno haciendo uso del método de la función deinfluencia. Para ello, la zona explotada se descompone en elementos diferenciales deárea, convirtiéndose la integral que estima el hundimiento recogida en la ecuación 89,en un sumatorio en el que se acumulan los efectos de todos los elementos de volumenextraídos para cada uno de los puntos del terreno. Una vez calculados losdesplazamientos (horizontales y verticales) de cada uno de los puntos del mallado de lasuperficie, se obtienen el resto de las magnitudes de interés para cada uno de estospuntos: pendiente, curvatura, deformación unitaria, etc.127
En esta etapa se determinan también los valores de los ángulos límite superior einferior para los distintos cortes especificados por el usuario. Por ángulo límite inferior(superior) se entiende el ángulo que forma con la vertical la línea recta que une el puntodel corte de la capa de cota inferior (superior) con el punto del corte del terreno conhundimiento 1 mm. Para permitir la comparación de ambos ángulos con los resultadosrecogidos en la bibliografía, los puntos situados sobre el terreno se sitúan a una mismacota de referencia arbitraria que, en este caso, corresponde a la cota del punto dehundimiento máximo (ver figura 70).ä'Ü åæà?B@9üÖ ×ONÞå)æAC Ù)êECPÄãÜßOÚêα F βLa cuarta etapa, GENRES, es la encargada de la generación de las líneas deisovalores correspondientes a cada uno de las magnitudes estudiadas: hundimientos,desplazamientos horizontales según los ejes del dibujo, pendientes, deformacioneshorizontales unitarias, curvaturas, etc..Las líneas de isovalores se representan sobre la topografía original en el mismoentorno gráfico empleado el primer módulo, lo que permite su edición y la obtención decortes en cualquier dirección definida por el usuario. Todos los resultados gráficospreviamente generados pueden presentarse en papel a la escala deseada medianteimpresora o plotter.A continuación se detalla la arquitectura y modo de funcionamiento de cada unode los módulos que componen el programa SUBSID:128
Q,RTSVUXWZY\[^]K_
Una vez definidas espacialmente todas y cada una de las capas de interés, sedefinen las distintas zonas explotadas y sus potencias medias dentro de cada una deellas. Para ello se representa el contorno de cada una de las zonas explotadas medianteuna polilínea cerrada cuya cota o elevación corresponde a la cota media de la zona. Sedebe señalar que esta potencia media se ve afectada por el coeficiente de postaller quedepende del tipo de tratamiento que se le de al taller (hundimiento, relleno manual,relleno hidráulico, etc.). Los contornos correspondientes a cada capa se recogen en sucorrespondiente layer denominado ZSUP# donde # es el número de orden asignado a lacapa PSUP# en el apartado anterior.La definición de cada una de las zonas explotadas, dentro de las diferentes capas,se completa con la asignación de los correspondientes parámetros( ax ay kx ky nx ny bx by cx cy), , , , , , , , , de la función de influencia, empleados en el móduloCALSUB. Se pretende con esto, realizar una evaluación individualizada de la influenciade los elementos extraídos pertenecientes a cada zona. La inserción de estos parámetrosno es posible hasta su obtención en el módulo PARSUB, por lo que será necesario haceruso de nuevo de AutoCAD ® para asignar sus valores, una vez que estos son obtenidosen el siguiente módulo.Para la asignación de estos parámetros se hace uso de la sección de atributosextendidos que poseen las entidades gráficas utilizadas por AutoCAD ® . Para ello se hadesarrollado una pequeña aplicación en el entorno de desarrollo (ADS) del propioprograma que facilita su definición mediante el empleo del menú presentado en lafigura 71.Selección de Parámetrosa xk xn xb xc xa yk yn yb yc yä§d åæ9àL?B@9ûÖ e§¢BfÞAgáAfêKfACfAhIhKd¨ÞáAfâA?àãBfCßAàLiêáAfBC?êëKiÞA?êEf¡¤QâACiCßH?áA?êLa introducción de los datos, dentro de este primer módulo, finaliza con larepresentación de los edificios contenidos en la zona estudiada. Estos se representanmediante polilíneas cerradas de elevación nula que se recogen en un layer denominadoCSUP.El resto de la información auxiliar puede colocarse en diferentes layers(generalmente el 0), siempre y cuando sus nombres no coincidan con los nombresreservados que se presentan en la tabla 11.130
úLAYERLSUPPSUP#ZSUP#CSUPDXLINDYLINDZLINDHLINCLINPLINDULINCONTENIDOLíneas de nivel del terrenoTrazas de las capas de carbónLímites de las zonas explotadas dentro de cada capaEdificiosIsolíneas de desplazamiento horizontal según OXIsolíneas de desplazamiento horizontal según OYIsolíneas de desplazamientos verticalesIsolíneas de desplazamientos horizontalesIsolíneas de curvaturasIsolíneas de pendientesIsolíneas de deformación¥j?AkAC ?û9ûÖ e£lmiãBkàLfnFohKiÞCßHfÞAd áAiáAfBCiê?pF§fàêEfãGâAC fA?áAi9êHâAiàMqsrutnq"vxwUna vez finalizada la digitalización y la definición topográfico-geométrica delproblema, se prepara el fichero que se procesará posteriormente, para la generación delos modelos del terreno y las labores. Para ello se hace uso del comando DXFOUT, quegenera automáticamente dicho fichero con formato DXF (Data eXchange Format).La creación de los mallados se realiza de forma independiente para cada uno delos conjuntos de polilíneas definidas en la etapa de digitalización. Este procesocomienza con la definición por parte del usuario de la longitud del lado e de la retículaque se va a crear. Con este valor y las dimensiones de la zona que se va a estudiar secalcula el número de divisiones que presentará la retícula en las direcciones de los ejesde coordenadas. Se solicita, a continuación, al sistema operativo la memoria necesariapara contener la información de todos los puntos del mallado, como son suscoordenadas y los valores de las magnitudes estudiadas: desplazamientos verticales yhorizontales, pendientes, deformaciones unitarias, etc.Posteriormente se efectúa la identificación de las polilíneas que corresponden allayer analizado en cada caso (terreno y labores). Una vez identificada la polilínea, seanaliza cada uno de los segmentos que la definen, verificando si dicho segmentointersecta alguno de los perfiles de la retícula, como se observa en la figura 72. Si fueseasí, cada uno de los puntos de intersección se añade al perfil correspondiente. De estaforma, los puntos P 1 , P 2 , P 4 , P 5 y P 7 son añadidos a la lista de puntos pertenecientes alos perfiles, paralelos a OY, px i , px i+1 , px i+2 , px i+3 y px i+4 respectivamente. Mientras, P 3 ,P 6 y P 8 se incluyen en los perfiles py j+1 , py j+2 y py j+3 .131
ä£d åæà?B@9èÖxeì áGfÞCßHdyHdhI?AhKd ¨ÞáAfbCiêHâæÞCßziêáAfbC?1àfCßHPxh5æAC ?Finalizado el análisis de todas las polilíneas contenidas en un determinado layer,se procede a la ordenación de los puntos asignados a cada uno de los perfiles delmallado. A continuación se realiza la interpolación lineal de las cotas de los puntos dela retícula, como se presenta en la figura 73, partiendo de los perfiles definidosanteriormente. Así, la cota de un punto P de la retícula está dada por la expresión:zP⎛ z + z z + z= 0,5⎜+⎝ 2 2P1 P2 P3 P4⎞⎟⎠(92)ä§d åæà?B@íÖ eì ÞCßzfàâAiAC ?AhKd ¨ÞáAfBhIiCßH?BfÞâæÞCßHiêHáAfBC ?àfCßzP h5æAC ?De esta forma, los modelos de las distintas superficies manipuladas por elprograma SUBSID no están definidos únicamente a partir de los puntos de intersecciónde los perfiles de la retícula, sino que los puntos de las polilíneas empleados como basede la interpolación también forman parte del mallado.Se obtiene así un modelo reticular de la superficie del terreno, como en el ejemplopresentado en la figura 74, y de las labores subterráneas, como se ha visto en la figura132
66, que facilita la integración discreta de las funciones de influencia que se realiza enlos módulos PARSUB Y CALSUB.ä£d åæà?B@9îÖ e£¢BiáAfACiáAd åAdßH?ACK{áAfàLfAh5ýA?A|'áAfæÞA?ê5æâAfà yHd hKdfáAf¡yHd ÞAd áA?âAiàê>æêsCP ÞAfA?êHáAfÞAd MfACI{d ëKDæAdfàáA?A|133
Q,RTSVUXWZY\}~€B` a‚cPara la determinación de los seis parámetros que caracterizan la función deinfluencia en cada una de las zonas explotadas de un determinado problema, se hadesarrollado en lenguaje C++ un algoritmo genético cuyo esquema se recoge en lafigura 75.Número de IteracionesError mínimoModelos Digitales de lasLabores SubterráneasPuntos de ControlObtención PrimeraPoblación CromosomasEvaluación del errorInversiónMutaciónSe sobrepasa elnúmero máximo de iteracioneso el error es menor que elumbral ?NoCruceSiGeneración delFichero de Resultadosä£d åæà?B@9þÖ e£¦¨êIDæAfãB?áAfBC ?êáAdyHfàLfÞCßHfêEfCßH?âA?êáAfGC5ãB¨áæAC i‚ƒ"„n…nqsr£tEn primer lugar, se crea una población formada por tiras de bits que representantantos números enteros de 32 bits como párametros definen el modelo de función deinfluencia que se desea evaluar. Cada uno de ellos se convierte en un número real,mediante una transformación lineal teniendo en cuenta el rango de valores especificadopara cada parámetro. Se obtienen así los valores particulares de los parámetros que setratan de calcular. Cada una de estas tiras de enteros recibe el nombre de cromosoma.enterob b b b b b b b ... .31 30 29 28 27 26 25 24b 7 b 6 b 5b 4b 3 b 2 b 1b 0ä§d åæà?B@çÖ eI¥jd à?áAfíèBkAdßAêâA?àL?BC?àLf9âàLfêKfÞCßH?AhKd ¨ÞGáAfæÞÞAgãBfàiBfÞCßHfàLi134
1 1 1B 3B 2B 1B1 2 2 20B 3B 2B 1B2 3 3 3 3 4 4 4 4 5 5 5 5 6 6 6 60B 3B 2B 1B 0B 3B 2B 1B 0B 3B 2B 1B 0B 3B 2B 1B 0enteroentero entero entero entero entero1 2 3 4 5 6ä§d åæA†L?B@‡@Ö e§¦GˆfA‰‚ŠACiB‹Af‚hI†iA‰BiêKiA‰B?BhKiA‰BŠæAfê ŒHiBŠAiA†'êKfAdêsŠA?A†LA‰Bf¡ŒH†iêA continuación, se extraen de cada uno de los cromosomas los valores numéricosy se determina el error cometido durante la integración de la función de influencia,comparando los resultados con los valores medidos en los puntos de control o hitos.Para la distribución de errores obtenida se determina su suma en valor absoluto, deacuerdo con la expresión:N∑i=ewi− wi1 (93)donde, w i es el desplazamiento vertical medido en cada punto de control, y w ievalor calculado a partir de la función de influencia para el hito i.es elA cada uno de estos cromosomas se le asigna una probabilidad de supervivenciainversamente proporcional al error cometido, así el cromosoma que produce un errormínimo tiene una probabilidad unidad de sobrevivir, mientras que el cromosoma quepresenta un error máximo tiene probabilidad nula.Una vez evaluados todos los cromosomas se procede a cruzarlos, para ello seescoge al azar un determinado porcentaje de la población inicial, teniendo en cuenta laprobabilidad de supervivencia de cada cromosoma. En el algoritmo desarrollado paraeste trabajo, el cruce de cromosomas se realiza por parejas, intercambiando cada una delas partes que resultan de dividir los cromosomas de la pareja por la mitad.Padre AHijo ABPadre BHijo BAPunto de Intersecciónä§d åæA†?B@AJÖ e'ÿ"†iAhKfêKiB‹Af‚hI†æAhKfB‹AfGæÞA?BŠ‡?A†Lf¡ˆŽ?‚‹AfBhK†Li‡‰BiêKiA‰B?êFinalizada la etapa de cruce, se evalúa la nueva población y realizamos un nuevocruce. Se procede así, sucesivamente, hasta alcanzar el número máximo de iteracionesestablecido de antemano o hasta que alguno de los cromosomas genere un error inferioral umbral especificado al inicio del proceso.135
Dentro de este mismo programa se han implementado otros procedimientos parala obtención de nuevas poblaciones como la mutación, donde se altera de formaaleatoria un bit de un determinado porcentaje de cromosomas de la población original, ola inversión, que consiste en cambiar unos por ceros y viceversa.Una vez obtenidos los valores óptimos de los parámetros para cada caso, estos sealmacenan en un fichero de texto denominado calsub.dat, para que puedan seridentificados posteriormente por el módulo CALSUB. Se facilita también, de estaforma, la edición de estos valores por parte del usuario si fuese necesario en algunaetapa del estudio. El listado de este fichero es el siguiente:# Pdef: Potencia por defecto de aquellas capas de las que se desconocen# los límites de la zona explotada.1.0## Valores de los parámetros en el eje principal X:# axp kxp nxp0.50 0.75 0.41# Valores de los parámetros en el eje principal Y:# ayp kyp nyp0.35 0.65 0.32#donde las líneas que empiezan con el símbolo # son comentarios explicativos, queaclaran el significado de los distintos valores numéricos recogidos en este fichero.136
La primera etapa dentro de este módulo, como se presenta en la figura 79,consiste en la lectura de los mallados correspondientes a la superficie del terreno y laslabores subterráneas, generados por el módulo DIGSUB. En esta misma etapa se leen,desde el fichero de texto creado en el módulo anterior, los valores de los distintosparámetros que se van a emplear en la función de influencia.Q,RTSVUXWZY‘~’>`baBcPÁRAMETROSÓPTIMOSMODELOSDIGITALESINTEGRACIÓNFUNCIÓN DE INFLUENCIADESPLAZAMIENTOSVERTICALES YHORIZONTALESPENDIENTESCURVATURAS YDEFORMACIONESä§d åæA†L?B@9ÕÖ e£¦¨êKDæAfA‰B?b‹AfBC?êE‹AdyHfA†LfÞ¡ŒHfêEf¡ŒH?AŠA?êE‹AfACK‰B¨G‹æACi”“u„n•£q–rutEn la segunda etapa, se realiza la integración propiamente de la función deinfluencia presentada en el capítulo anterior, ecuación 89. A continuación se presenta elpseudo-código de este algoritmo:El módulo CALSUB esPara cada punto del terreno (P) hacer// se ponen a cero las componentes del vector desplazamientoVx[P] = Vy[P] = Vz[P] = 0Para cada zona explotada (Z) hacerPara cada elemento (E) de la zona j hacer// se calcula la distancia horizontal y verticalr = dh(P,E)h = dv(P,E)// se calcula los parámetros en este elemento a partir// de sus valores caracteristicos para la zona(aE, kE, nE, bE, cE) = ParEle (P,E, aZ, kZ, nZ, bZ, cZ)// se determina el hundimiento del punto i de acuerdo// con la expresión de la función de influencia propuestaw = FunciónInfluencia(r, h, aE, kE, nE, bE, cE)// se acumula la influencia de cada elemento extraidoVz[P] = Vz[P] + w// se determinan los desplazamientos horizontalesDespHor (Vx[P], Vy[P])siguiente Esiguiente Zsiguiente Pfin CALSUB.úd ê ŒH?A‹Ai1û9íÖ eÿ7êKfæA‹AiBhI¨A‹Ad åAib‹AfBC?Bf¡ŒH?AŠG?B‹AfBd Þ¡ŒHfåA†L?AhId¨ÞB‹AfACI‰B¨A‹æACi “u„n•£q–rut137
Se obtienen, así, los desplazamientos verticales y horizontales de todos los puntosdefinidos en el modelo digital del terreno. A continuación, se calculan las pendientes,deformaciones unitarias horizontales y curvatura en cada uno de esos puntos. Estasmagnitudes tienen carácter direccional, por lo que su cálculo se ha realizado a lo largode la dirección de desplazamiento de cada punto.ä§d å懆L?BJ9üÖ eÿ"†LiAhKfêKiB‹AfBiAk¡ŒHfÞAhKd¨ÞB‹AfBC?êsŠAfÞA‹AdfÞ¡ŒHfêK—A‹Af¡yHiA†‰B?AhKd iÞAf9êHýAiA†d ëIiÞ¡Œ˜?AC fêæÞAdŒH?A†d ?êFXh5æA† M?¡ŒAæA†?êEn la figura 80 se muestra la porción de retícula correspondiente a undeterminado punto P de la superficie del terreno del que se desea conocer su pendientey deformación unitaria horizontal. En dicho punto se han calculado ya losdesplazamientos vertical y horizontal, definiendo el vector de desplazamientos šv .Tomando como origen el punto P se determinan sobre la retícula, según la dirección delvector ›v , los puntos Q 1 y Q 2 ; y se calculan sus respectivos vectores de desplazamientoœv 1y v 2mediante una interpolación lineal a partir de los resultados obtenidos para lospuntos de la retícula. Por último, se asignan los valores de pendiente y deformaciónunitaria horizontal en el punto P según las siguientes ecuaciones:pdcPPP⎛ v1− v= 0,5⋅⎜⎝ PQ⎛⎜⎜= 0,5⋅⎜⎜⎜⎜+⎝=PQv − v+PQz z z 2z2( 1x 1x x x) ( 1y 1y y y )2+ PQ1 21q + v − p − v + q + v − p − v − PQPQ2( x x 2 x 2 x ) ( y y 2 y 2 y)p + v − q − v + p + v − q − v − PQ⎛ v1− v⎜⎝ PQ2⎞⎟⎠v − v−PQz z z 2 z1donde p P , d P y c P son la pendiente media, la deformación horizontal unitaria media y la⎞⎟⎠1PQcurvatura en el punto P, según la dirección de desplazamiento.22221+2⎞⎟⎟⎟⎟⎟⎟⎠(94)138
Q,RTSVUXWZY_+ž–Ÿ€Bž–`La generación de los resultados numéricos y gráficos está caracterizada por unconjunto de valores o preferencias, establecidos por el usuario, que se recogen en unfichero de texto denominado genres.dat, cuyo listado se presenta a continuación:# Fichero que preferencias empleado por el programa SUBSID## Ampliación de los desplazamientos# Tamaño del texto relativo a las dimensiones máximas del dibujo#150. 0.0075## Separación entre las isolíneas.# Se indica también cada cuantas líneas se desea una línea maestra, y el# tipo de valores que se van a representar (0-Positivos 1-Negativos).# El ultimo valor de cada línea indica el factor de escala con el que se# generan los números que identifican las isolíneas.# HLIN (m) Los valores en milímetros.# PLIN# DXLIN (m)# DYLIN (m)# UDEF# DHLIN (m)# CLIN# SEP NM TIPO ESC0.050000 1 0 0.0010.000500 1 0 0.000010.005000 1 1 0.0010.005000 1 1 0.0010.000500 1 1 0.000010.001000 1 0 0.0010.000005 1 0 0.000001## Identificamos los planos verticales según los cuales se realizarán los# distintos cortes de la cubeta de subsidencia. Para cada plano se genera# un fichero independiente.## Num. Planos1## Par de puntos por los que pasa la traza horizontal de cada plano# x0 y0 x1 y1 nom_fich SPLINE0.0 0.0 672.3 543.4 corte.dxf 1En este listado se observa, además de las preferencias propiamente dichas, unaserie de comentarios identificados por la presencia del carácter # en la primera posiciónde cada línea. El programa SUBSID descarta todas estas líneas durante la lectura delfichero.En primer lugar, se identifica el factor de ampliación de los desplazamientos quefacilita la visualización de los resultados gráficos en aquellos casos en los que eldesplazamiento de la superficie es pequeño. En la misma línea aparece el tamaño de lostextos que se emplearán en la generación de los gráficos finales.A continuación, para cada uno de los siete tipos de isolíneas que genera elprograma, se detallan la separación entre los valores que dan lugar a la generación deuna isolínea. Se indica también, el número de líneas que separan una línea maestra deotra. Estas son las que aparecen en el gráfico acompañadas de un número que representa139
su valor. Luego se indica el tipo de valores que se van a representar (0-Positivos1-Negativos). Al final de cada línea, se recoge el factor de escala con el que se generanlos números que identifican las isolíneas.Por último, en el fichero genres.dat se indica el número de cortes que se deseaobtener, señalando para cada uno de ellos la línea de corte, el nombre del fichero dondese guardará y el tipo de polilíneas que se emplearán para la representación de lasintersecciones (0-Líneas poligonales 1-Líneas suavizadas).En la figura 81 se presenta un esquema de las distintas etapas que componen estemódulo.PREFERENCIASgenres.datMODELOSDIGITALESOBTENCIÓNSEGMENTOS ELEMENTALESIDENTIFICACIÓNISOLÍNEASETIQUETADOISOLÍNEASä£d åæA†?BJ9ûÖ e£¦¨êIDæAfA‰B?B‹AfBC ?ês‹AdyHfA†LfÞ¡ŒHfêEf¡ŒH?AŠA?ês‹AfGCK‰BÄ‹æAC i” ¡¢ … ¡ qUna vez leídas las preferencias del usuario para cada uno de estos valores desde elfichero genres.dat, se procede a la obtención de los segmentos elementales queconstituyen cada una de estas líneas mediante la intersección de la superficie deecuación z=f(x i ,y i ), con el plano horizontal de valor z constante como se recoge en lafigura 82. El valor de corte varía para cada uno de los grupos de isolíneas, de acuerdocon la información contenida en el fichero de preferencias.Los segmentos así obtenidos, cuyos extremos coincidan, se enlazan para formaruna sola entidad o isolínea. Una vez definida esta, si se trata de una línea maestra, se leasigna la correspondiente etiqueta en la que se indica el valor de corte con que se hagenerado, afectada de la correspondiente escala asignada en el fichero genres.dat.140
ä£d åæA†?BJ9èÖ e'ÿ"†LiAhKfêKiB‹AfBiAk¡ŒHfÞAhId¨ÞB‹AfæÞêKfåA‰BfÞ¡ŒHiB‹AfBd êIiACP ÞAfA?La información gráfica obtenida en este módulo se guarda en ficheros conformato DXF, susceptibles de ser editados con AutoCAD ® . Esto permite lasuperposición de la información original con cada uno de los conjuntos de isolíneascomo puede apreciarse en las siguientes figuras:141
ä§d åæA†L?BJ9íÖ e'ì êKiAC P ÞAfA?êE‹AfýæÞA‹Gd‰Bdf)Þ¡ŒHi142
ä§d å懆L?BJ9îÖ eìÄêKiACP ÞAfA?êE‹AfB‹‡fêIŠAC?ëI?A‰‚d fÞ¡ŒHiêýAiA†Ld ëKiÞ¡ŒH?AC fê143
ä§d åæA†L?BJ9þÖ eì êIiACP ÞAfA?)ês‹AfB‹AfêIŠAC?ëK?A‰Bd fÞ¡ŒHiêýAiG†d ëKiÞ¡ŒH?ACf)êêKfåAgÞbfACKf¡ˆfB£s¤144
ä§d åæA†L?BJ9çÖ eì êIiACP ÞAfA?)ês‹AfB‹AfêIŠAC?ëK?A‰Bd fÞ¡ŒHiêýAiG†d ëKiÞ¡ŒH?ACf)êêKfåAgÞbfACKf¡ˆfB£¥145
ä§d å懆L?BJ‡@Ö e'ì êKiAC P ÞAfA?ês‹AfÿfÞA‹AdfÞ¡ŒHfê146
ä£d åæA†?BJ‡JÖ e'ì êKiAC P ÞAfA?ês‹Afénf¡yHiA†L‰B?AhKd iÞAfês¦3ÞAdŒH?A†Ld?ê147
ä£d åæA†?BJ9ÕÖ e'ì êKiACP ÞAfA?ês‹AfB§3æA† §?¡ŒAæA†?148
ä§d åæA†?ÕüÖ e §niA† ŒHf9¨–e ¨–©ªhKiÞBC?êEh5æA† §?ês‹AfBhK?A‹A?æÞAiB‹AfBCiêHêKdf¡ŒHfBŠA?A†LA‰‚f¡ŒH†Liêsfê ŒAæA‹Ad ?A‹Aiê149
Dada la gran flexibilidad de la herramienta informática presentada en estecapítulo, esta puede ser de gran ayuda para el proyectista a la hora de evaluarsituaciones de posible riesgo. Gracias a la generación de los diferentes tipos deisolíneas, es posible delimitar las zonas del terreno con valores críticos de losparámetros que generalmente estarán incluidas en el interior de la correspondienteisolínea. Por ejemplo, teniendo en cuenta las deformaciones unitarias obtenidas en elmódulo GENRES se puede analizar la relación entre las distintas zonas sometidas acompresiones y tracciones, para estudiar la influencia relativa y su efecto sobre unadeterminada edificación.Cada una de estas zonas críticas puede ser definida gráficamente, lo que facilita laidentificación de las construcciones que puedan verse sometidas a los posibles dañosocasionados por los desplazamientos del terreno. Para la identificación de estas zonas seha desarrollado un pequeña aplicación (Bello [132]) en el entorno ADS (AutoCADDevelopment System ) de AutoCAD ® denominada SUBCRI.Al igual que las librerías estandard del lenguaje C, el entorno ADS está definidopor un conjunto de librerías y ficheros de encabezamiento. Estos ficheros estándisponibles para la mayoría de las plataformas (tanto máquinas como sistemasoperativos) que actualmente soportan AutoCAD. Debido a esto, las aplicaciones quehacen uso del entorno ADS son fácilmente portables, a nivel de código, desde unaplataforma a otra. En este caso, la aplicación se ha desarrollado en el entorno PC, paraluego ser portada a estaciones de trabajo SGI y HP sin ninguna modificación.El proceso se basa en los contornos de las construcciones situadas en la superficieafectada que han sido digitalizadas en el módulo DIGISUB. Cada una de ellas serepresentan mediante una polilínea cerrada lo que permite su posterior identificación. Acada una de estas polilíneas se le asocia una categoría, de acuerdo con la tabla 12recogida en el anexo de este trabajo, mediante la inserción en la zona de atributosextendidos de cada entidad el correspondiente valor. Este proceso se lleva a cabomediante el comando categoría implementado dentro de SUBCRI. A continuación, semuestra un ejemplo de uso de este comando:Command: categoríaNueva categoría : 1Selecciona una polilínea: picar polilíneaSelecciona una polilínea: picar polilínea...Una vez asignada la categoría a una determinada polilínea esta se sombreamediante una trama característica (hatch), facilitando la identificación de los tipos deconstrucciones presentes en la zona afectada. En la siguiente figura se presenta unejemplo de este tipo de identificación.150
ä£d åæA†?Õ9ûÖ e£«"iA‰BkA†fA?A‹Aiês‹AfBC iês‹Ad ꬌHd Þ¡ŒHiêŒHd ŠAiês‹AfBhKiÞꬌH†æAhKhIdiÞAfêEl programa SUBCRI se encarga luego del agrupamiento de las distintasconstrucciones según el daño estimado a partir de los valores recogidos en el anexo.Así, cada uno de los grupos de daño identificados se coloca en un layer diferente, lo quepermite su identificación individualizada. Esta tarea se completa con la identificación delas zonas de la superficie donde alguna de las magnitudes estudiadas supera los valoresindicados por el usuario. El rayado de estas zonas se realiza aplicando la trama asignadaen un fichero de opciones, como el presentado el siguiente listadoú# TRAMA ANG ESC PARAM COND LAYERANSI31 0 100 DZ
ä£d åæA†?Õ9íÖ e£§iÞA?BhIiÞB‹AfêKŠAC?ëI?A‰BdfÞ¡ŒHiêýAiA†Ld ëIiÞ¡ŒH?ACfêsd Þ¡yHfA†d iA†fêE?èþB‰‚‰ä§d å懆L?Õ9îÖ e§£iÞA?‚hIiÞB‹‡f¡yHiA†L‰B?‡hIdiÞAfêæÞAdŒH?A†d ?êýAiA†d ëKiÞ¡ŒH?ACfês‹AfBhKiA‰BŠA†fêKd ¨Þ152
ï¦ð¢ñ£ò¦ó¨ï¦óœòôžõöð¢÷ø¦óœùò¦ó¨ï¯®^¥ñ ð¢÷ 3°3±b² Q ²³£´µAA·¸B¹‡ºÖ »£¼ ½¡¾H¿A·LÀB¸AÁK´ÂA½bµA·Ã¡¾H´ ÁK¸BÄAÅBÆA¸A· ÇH´ÄA¸`baBcb`]¬[Se recogen a continuación, partiendo de los mismos datos que se emplearon en elcapítulo anterior para la evaluación del programa SUBEE, los resultados obtenidos paraalguno de los modelos presentados en la tabla 10.En primer lugar se presenta la información digitalizada en el modulo DIGISUBcorrespondiente al problema estudiado, para luego indicar los resultados numéricosgenerados por el módulo CALCSUB para cada modelo. Por último, se muestran losgráficos generados en cada caso por el módulo GENRES.153
´É¬ÇH¸AÄA¿BʇºÖ »§ËnÅAÉKAÌÇH¸AÄA¿AÉs½AAÀBÍA·´ÁK¿AÉsÁK¿A½BÎBÆA¸A·ÃAÀBÅ¡ÇH·¿Aɳ£´µAA·¸B¹‡ÏÖ »£¼ ÉK¿GÌÐ ½AÅA¸AÉsÄGÅBÑmA½AÄA´ ÀB´ÅA½¡ÇH¿BÁI¿A½BÎBÆA¸A·LÃAÀBÅ¡ÇH·¿AÉ[ZSUP1]Max. Hund. : 0.002 Pos. [X,Y,Z]: 1080.000 1241.921 387.500Max. D.Hor.: 0.003 Pos. [X,Y,Z]: 230.000 1086.334 250.000Max. Desp.X: -0.003 Pos. [X,Y,Z]: 230.000 1161.908 250.000Max. Desp.Y: -0.002 Pos. [X,Y,Z]: 980.000 679.061 250.000[ZSUP2]Max. Hund. : 0.038 Pos. [X,Y,Z]: 810.000 1004.904 250.000Max. D.Hor.: 0.022 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.X: -0.018 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.Y: 0.013 Pos. [X,Y,Z]: 230.000 1589.000 287.500[ZSUP3]Max. Hund. : 0.062 Pos. [X,Y,Z]: 830.000 998.844 250.000Max. D.Hor.: 0.036 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.X: -0.029 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.Y: 0.022 Pos. [X,Y,Z]: 230.000 1589.000 287.500[ZSUP4]Max. Hund. : 0.071 Pos. [X,Y,Z]: 840.000 997.019 250.000Max. D.Hor.: 0.042 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.X: -0.034 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.Y: 0.026 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Pend.: 0.000420 Pos. [X,Y,Z]: 230.000 1351.135 300.000Max. DefU.: 0.000754 Pos. [X,Y,Z]: 230.000 1377.946 300.000Max. Curv.: 0.000038 Pos. [X,Y,Z]: 230.000 1337.729 300.000È154
³§´µAA·L¸B¹‡ÒÖ »§¼ ÉI¿AÌÐ ½AÅA¸AÉEÄAÅBÓmÅAÉIÆA̸AÔK¸AÀB´ ÅA½¡ÇH¿BÑn¿A·´ÔI¿A½¡ÇH¸AÌKÁI¿A½BÎBÆA¸A·ÃAÀBÅ¡ÇH·L¿Aɳ§´µAA·L¸B¹‡ÕÖ »§¼ ÉI¿AÌÐ ½AÅA¸AÉsÄAÅBÖ"ÅA½AÄA´ ÅA½pÇHÅAÉEÁK¿A½BÎBÆA¸A·LÇÀBÅ¡ÇH·L¿AÉ155
³£´µAA·¸B¹‡¹Ö »£¼ ÉK¿AÌ Ð ½AÅA¸AÉsÄAÅBÓnÅ¡¾H¿A·LÀB¸AÁK´ÂA½B×n½A´ÇH¸A·´ ¸BÁK¿A½BÎBÆA¸A·LÃAÀBÅ¡ÇH·¿Aɳ£´µAA·¸BʇØAØÖ »§¼ ÉK¿AÌ Ð ½‡ÅA¸AÉEćÅBÙnA· Ú§¸¡Ç˜A·L¸BÁK¿A½BÎBÆA¸A·ÃAÀBÅ¡ÇH·¿AÉ156
³£´µAA·¸BʇØAÊÖ »§¼ ÉI¿AÌÐ ½AÅA¸AÉEÄAÅBÑmA½AÄA´ ÀB´ÅA½¡ÇH¿BÁK¿A½bº¡ÛMÜBÆA¸A·LÃAÀ‚Å¡ÇH·L¿AÉ[ZSUP1]Max. Hund. : 0.005 Pos. [X,Y,Z]: 800.000 1366.919 437.500Max. D.Hor.: 0.027 Pos. [X,Y,Z]: 230.000 859.611 250.000Max. Desp.X: -0.023 Pos. [X,Y,Z]: 230.000 859.611 250.000Max. Desp.Y: -0.014 Pos. [X,Y,Z]: 240.000 856.433 250.000[ZSUP2]Max. Hund. : 0.047 Pos. [X,Y,Z]: 1330.000 1210.393 425.000Max. D.Hor.: 0.106 Pos. [X,Y,Z]: 230.000 859.611 250.000Max. Desp.X: -0.097 Pos. [X,Y,Z]: 230.000 859.611 250.000Max. Desp.Y: 0.060 Pos. [X,Y,Z]: 230.000 1589.000 287.500[ZSUP3]Max. Hund. : 0.075 Pos. [X,Y,Z]: 1350.000 1152.347 415.625Max. D.Hor.: 0.150 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.X: -0.116 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.Y: 0.095 Pos. [X,Y,Z]: 230.000 1589.000 287.500[ZSUP4]Max. Hund. : 0.085 Pos. [X,Y,Z]: 1380.000 1131.594 425.000Max. D.Hor.: 0.180 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.X: -0.139 Pos. [X,Y,Z]: 230.000 1589.000 287.500Max. Desp.Y: 0.115 Pos. [X,Y,Z]: 230.000 1589.000 287.500ÈMax. Pend.: 0.001658 Pos. [X,Y,Z]: 230.000 1377.946 300.000Max. DefU.: 0.003048 Pos. [X,Y,Z]: 230.000 1377.946 300.000Max. Curv.: 0.000063 Pos. [X,Y,Z]: 230.000 1270.700 300.000´ É ÇH¸GÄA¿BʇÏÖ »§ËnÅAÉKAÌÇH¸AÄA¿AÉs½AAÀ‚ÍA·L´ÁK¿AÉsÁI¿‡½Bº¡ÛMÜBÆA¸A·ÃAÀBÅ¡ÇH·¿AÉ157
³§´µAA·¸BÊA؇ÜÖ »£¼ ÉK¿AÌÐ ½AÅA¸AÉEÄAÅBÓmÅAÉIÆA̸AÔK¸AÀB´ ÅA½¡ÇH¿BÑm¿A·L´ÔI¿A½¡ÇH¸AÌKÁK¿A½Bº¡Û§ÜBÆA¸A·ÃAÀBÅ¡ÇH·L¿Aɳ§´µAA·¸BÊA؇ÎÖ »£¼ ÉK¿AÌÐ ½AÅA¸AÉsÄAÅBÖ"ÅA½AÄA´ Ň½¡ÇHÅAÉEÁK¿A½Bº¡ÛMÜBÆA¸A·ÃAÀBÅ¡ÇH·L¿AÉ158
³£´µAA·¸BʇØAÝÖ »§¼ ÉI¿AÌÐ ½AÅA¸AÉsÄAÅBÓnÅ¡¾H¿A·LÀB¸AÁK´ÂA½B×n½A´ÇH¸A·L´¸BÁI¿A½Bº¡ÛMÜBÆA¸A·LÃAÀ‚Å¡ÇH·L¿Aɳ§´ µA‡·L¸BʇØAºÖ »£¼ ÉK¿AÌÐ ½AÅA¸AÉsÄAÅBÙmA· ÚM¸¡ÇHA·¸BÁK¿A½Bº¡ÛMÜBÆA¸A·ÃAÀBÅ¡ÇH·¿AÉ159
[ZSUP1]Max. Hund. : 1.596 Pos. [X,Y,Z]: 970.000 1317.156 431.250Max. D.Hor.: 0.343 Pos. [X,Y,Z]: 550.000 1391.592 350.000Max. Desp.X: 0.343 Pos. [X,Y,Z]: 550.000 1391.592 350.000Max. Desp.Y: 0.122 Pos. [X,Y,Z]: 920.000 1268.988 406.250[ZSUP2]Max. Hund. : 1.567 Pos. [X,Y,Z]: 970.000 1317.156 431.250Max. D.Hor.: 0.361 Pos. [X,Y,Z]: 550.000 1391.592 350.000Max. Desp.X: 0.361 Pos. [X,Y,Z]: 550.000 1391.592 350.000Max. Desp.Y: 0.129 Pos. [X,Y,Z]: 920.000 1268.988 406.250[ZSUP3]Max. Hund. : 1.638 Pos. [X,Y,Z]: 970.000 1317.156 431.250Max. D.Hor.: 0.393 Pos. [X,Y,Z]: 560.000 1383.336 350.000Max. Desp.X: 0.393 Pos. [X,Y,Z]: 560.000 1383.336 350.000Max. Desp.Y: -0.124 Pos. [X,Y,Z]: 1340.000 1553.084 525.000[ZSUP4]Max. Hund. : 1.622 Pos. [X,Y,Z]: 970.000 1317.156 431.250Max. D.Hor.: 0.351 Pos. [X,Y,Z]: 560.000 1383.336 350.000Max. Desp.X: 0.351 Pos. [X,Y,Z]: 560.000 1383.336 350.000Max. Desp.Y: -0.108 Pos. [X,Y,Z]: 1330.000 1537.302 525.000ÈMax. Pend.: 0.033870 Pos. [X,Y,Z]: 960.000 1314.495 431.250Max. DefU.: 0.002695 Pos. [X,Y,Z]: 1020.000 1251.937 393.750Max. Curv.: 0.000379 Pos. [X,Y,Z]: 1380.000 1472.878 550.000´ É ÇH¸AÄA¿bʇÒÖ »§ËnŇÉIAÌÇH¸Ać¿AÉs½AAÀBÍA·´ÁI¿AÉsÁK¿A½BºpۧܡÛMÝBƇ¸A·LÃAÀ‚Å¡ÇH·L¿‡É³§´ µA‡·L¸BʇØAÏÖ »§¼ ÉK¿AÌ Ð ½AÅA¸AÉsÄAÅBÑnA½AÄA´ÀB´ÅA½¡ÇH¿BÁI¿A½Bº¡ÛMÜ¡ÛMÝBÆA¸A·LÃAÀBÅ¡ÇH·¿AÉ160
³£´µAA·¸BÊA؇ÒÖ »§¼ ÉI¿AÌÐ ½AÅA¸AÉsÄAÅBÓnÅAÉKÆAÌ ¸AÔK¸AÀB´ÅA½¡ÇH¿BÑn¿A·´ ÔK¿A½¡ÇH¸AÌKÁI¿‡½Bº¡Û§Ü¡ÛMÝBÆA¸A·LÇÀBÅ¡ÇH·L¿Aɳ£´µAA·¸BÊA؇ÕÖ »§¼ ÉI¿AÌÐ ½AÅA¸AÉsÄAÅBÖ"ÅA½AÄA´ÅA½¡ÇHÅAÉsÁK¿A½Bº¡ÛMܡ݂ۧÆA¸A·LÃAÀBÅpÇH·L¿AÉ161
³§´µAA·L¸BʇʇØÖ »£¼ ÉK¿AÌÐ ½AÅA¸‡ÉEÄAÅ‚ÙnA· Ú§¸pÇHA·L¸‚ÁI¿A½‚º¡ÛMܡ݂ۧÆA¸A·LÃAÀ‚Å¡ÇH·L¿‡É³§´ µA‡·L¸BʇØA¹Ö »§¼ ÉK¿AÌ Ð ½AÅA¸AÉsÄAÅBÓnÅ¡¾H¿A·ÀB¸AÁK´ ÂA½B×m½A´ÇH¸A·´ ¸‚ÁI¿A½Bº¡ÛMÜ¡ÛMÝBÆA¸A·LÃAÀBÅ¡ÇH·¿AÉ162
ÞßàáâãäåçæéèÞ,åêÞ,äãë+ìå:êíëïîðàíñë+à(íÞ,âìòæß0ëôó:í5õ3ã:â3ã:ñ0å163
öø÷3ùöûTüý¬÷3ùÿþ–üLas conclusiones obtenidas tras la realización de este trabajo pueden resumirse enlos siguientes apartados:1. Los modelos empíricos y los teóricos no son suficientemente flexibles para sergeneralizados a los distintos tipos de explotación, ni a las diferentes propiedades ycaracterísticas de los macizos rocosos. Por el contrario, el modelo propuesto eneste trabajo, aunque es necesario definir con detalle la topografía del terreno y delas labores subterráneas, no exige un conocimiento exhaustivo de las propiedadesdel macizo lo que le dota de una gran flexibilidad desde un punto vista práctico.2. En esta formulación se considera, dentro del mismo modelo, el comportamientoevolutivo de la subsidencia. Esto permite plantear la evolución de la superficie enel tiempo, incluso al finalizar la explotación, convirtiendo al programa en unaherramienta muy útil para la predicción del posible daño ocasionado por laexplotación.3. La formulación presentada en este trabajo permite al técnico separar las etapas deevaluación del modelo, predicción de su comportamiento y obtención de lainformación gráfica. Esto le permite valorar la desviación en el tiempo que undeterminado conjunto de parámetros provoca o la idoneidad de una nuevaestrategia frente a otra. Todo ello redunda en una mayor capacidad deintervención del usuario.4. El proceso de optimización adoptado en este trabajo, basado en técnicas deInteligencia Artificial, es el más adecuado para resolver problemas de estacomplejidad, caracterizados por un gran espacio de búsqueda de los parámetros yuna superficie de error muy rugosa, con varios óptimos locales y una sensibilidadelevada. Todo esto impide la aplicación de las técnicas convencionales dedescenso.5. La generalización de las herramientas gráficas de cálculo de curvaturas,pendientes, deformaciones unitarias, etc. al entorno tridimensional permite ungran avance respecto al tratamiento clásico, dotando al técnico de la informaciónsuficiente y correctamente organizada para que pueda interpretar fácilmente losresultados.6. Por lo que se refiere a las estrategias evolutivas, las técnicas propuestas en estetrabajo suponen una mayor velocidad de convergencia hacia el mínimo queaquellas que no mantiene una correlación en los patrones que controlan ladistribución probabilística de alteración de los genes164
þ–ö¤£ý¦¥¨§ü©^þjû£û¡B÷þ¢¡büComo futuras líneas de investigación que continúen la presentada en este trabajo,se pueden destacar las siguientes:1. Avanzar en el estudio del método de la función de influencia para tener en cuentalas irregularidades del macizo rocoso afectado por la subsidencia, como fallas,diaclasas, distintos tipos de estratificación, etc. Por otro lado, haciendo uso de lamisma metodología presentada en este trabajo, proponer un modelo de función deinfluencia independiente que permita obtener los desplazamientos horizontales delos puntos del terreno.2. Mejorar el estudio teórico de las Estrategias Evolutivas, haciendo especialhincapié en la teoría estadística, para obtener una algoritmo de optimización másrápido que el propuesto en este trabajo. Parece interesante, así mismo, el uso deotros tipos de funciones de influencia, por ejemplo, no asintóticas de la formaα( x − a) ( b − x)β , que permitirían la distribución asimétrica de la influencia de loselementos extraídos sobre los puntos de la superficie.3. Incluir en el programa propuesto en este trabajo, la caracterización de las zonas deposible riesgo, definidas según unos criterios racionales de daño en las estructurassituadas en superficie. Para ello, se propone realizar un estudio analítico de losdiferentes efectos perjudiciales que sobre dichas construcciones tiene el fenómenode la subsidencia.165
ßê:í,å166
§ú3÷¡Bý£,÷3ü3þù¢£ý öø÷3ü§Son modelos informáticos de pensamiento que derivan su comportamiento de unametáfora basada en los procesos evolutivos de la naturaleza. Esto se logra mediante lacreación en el interior de la computadora de una población de individuos representadospor cromosomas, en esencia un conjunto de cadenas de caracteres análogas a loscromosomas que constituyen nuestro ADN. Posteriormente, cada uno de los individuosque constituye esta población es sometido a un proceso evolutivo.Es importante comprender que la evolución, en la naturaleza o en cualquier otrositio, no es un proceso dirigido que tenga un propósito determinado a priori. Es decir,no existe ninguna evidencia que avale la afirmación de que el objetivo de la evoluciónes la Humanidad. De hecho, los procesos de la naturaleza parecen conducir hacia lacreación de diferentes individuos que compiten por los recursos de su entorno. Algunosson mejores que otros. Aquellos que son mejores tienen más posibilidades de sobreviviry propagar su material genético.En la naturaleza, se observa que la codificación de la información genética(genoma) se realiza de forma que admita la reproducción asexual, lo que conducegeneralmente a la obtención de descendientes genéticamente iguales a sus padres. Porotra parte, la reproducción sexual permite la creación de descendientes radicalmentedistintos a sus padres pero pertenecientes a su misma especie.De una manera muy simplificada, lo que ocurre a nivel molecular es que un parde cromosomas chocan entre si, intercambian porciones de información genética y seseparan. Esta es una operación de recombinación, que recibe el nombre de cruce dentrode la jerga de los programadores de AG, por la forma en que la información genéticacruza de un cromosoma a otro.La operación de cruce tiene lugar en un entorno donde la selección de loscromosomas que encuentran pareja es función de la adaptación de cada individuo, esdecir, de lo bueno que es cada individuo compitiendo con los demás en su entorno.Algunos algoritmos genéticos hacen uso de una función simple de la medida de suadaptación para seleccionar (probabilísticamente) a los individuos que serán sometidosa la operación de cruce o reproducción (propagación de material genético inalterado).Otras implementaciones, utilizan un modelo en el que un conjunto de individuosescogidos al azar compiten entre si y se selecciona al mejor adaptado. Esto recibe elnombre de selección por torneo, y es la forma de selección que se observa en lanaturaleza cuando un grupo de machos pelea entre si por el privilegio de aparearse conuna hembra. Los dos procesos que contribuyen en mayor medida a la evolución son elcruce y la selección/reproducción basada en la adaptación de los individuos.167
Existen pruebas matemáticas que indican que el proceso de reproducción enfunción de la adaptación está, de hecho, cerca del óptimo en ciertos sentidos.La mutación también juega un gran papel en todo este proceso, aunque no sea elpapel dominante que se le da popularmente a la evolución, es decir, mutación aleatoriay supervivencia del mejor. Un AG (como simulación de un proceso genético) no es unabúsqueda aleatoria de la solución (individuo altamente adaptado) de un determinadoproblema. Los AG hacen uso de procesos estocásticos, pero el resultado es claramenteno aleatorio.Los AG son empleados en un gran número de aplicaciones. Un ejemplo de esto esel problema de la optimización multidimensional en el que la cadena de caracteres delcromosoma se emplea para codificar los valores de los diferentes parámetros que sedesea optimizar.En la práctica, por tanto, se puede implementar este modelo genético decomputación mediante tiras o matrices de bits o caracteres que representan loscromosomas. La operaciones sencillas de manipulación de bits permiten laimplementación de las operaciones de cruce, mutación y otras. A pesar de que se harealizado un gran esfuerzo investigador acerca de las cadenas de bits de longitudvariable, la mayoría del trabajo realizado con AG está enfocado en las cadenas delongitud fija. En este punto, se debe destacar la importancia de estos dos aspectos: lalongitud fija de las cadenas y la necesidad de codificar la representación de la soluciónbuscada como una cadena de caracteres, lo que diferencia a los AG de la programacióngenética, que no hace uso de una representación de longitud fija y, generalmente, no secodifica el problema.Cuando se implementa un algoritmo genético suele seguir el siguiente ciclo:- Evaluación de la adaptación de los individuos de la población.- Creación de una nueva población mediante operaciones como el cruce, lamutación y la reproducción en función de la adaptación.- Descarte de la población vieja e iteración de la nueva población.Cada iteración de este bucle recibe el nombre generación aunque no existe unarazón teórica para esto. De hecho, no se observa este tipo de comportamiento en laspoblaciones existentes en la naturaleza como un todo, sin embargo la implementaciónde este modelo tiene sus ventajas.La primera generación de este proceso actúa sobre una población obtenida deforma aleatoria. De aquí en adelante, las operaciones genéticas, de acuerdo con lasmedidas de la adaptación de cada individuo, actúan para mejorar la población.168
Èlistado:Un ejemplo de pseudo-código correspondiente a un AG se recoge en el siguienteEl algoritmo AG es// empieza con un tiempo inicialt := 0;// inicia una población de individuos, generalmente de forma aleatoriaIniciaPoblación P(t);// evalúa la adaptación de todos los individuos de la población inicialEvalúa P(t);// comprueba el criterio de terminación (tiempo, adaptación, etc.)mientras no acabado haz// aumenta el contador de tiempot := t + 1;// selecciona una sub-población para la obtención de descendientesP' := SeleccionaPadres P(t);// recombina los "genes" de los padres seleccionadosRecombina P'(t);// modifica estocásticamente la población emparejadaMuta P'(t);// evalúa la nueva adaptaciónEvalúa P'(t);// selecciona los supervivientes por su adaptaciónP := Sobrevive P,P'(t);fin mientrasfin AG´ É ÇH¸AÄA¿bʇÕÖ »§Ö"ÉIŇAÄA¿BÁKÂAÄA´µA¿‚µAÅA½AÍA·L´ÁK¿BÄAÅBA½ "!"#%$ & '(!)+*","-"& $ ./!169
¡B÷¡(§0§öøý¦13ùéþ2¥^÷3úuû£ý¦¥¨§3 þ2La programación evolutiva es una estrategia de optimización estocástica similar alos algoritmos genéticos, pero emplea como criterio de búsqueda, tanto lasrepresentaciones genómicas como las operaciones de cruce.Al igual que los AG, la PE es útil en los problemas de optimización donde otrosmétodos como el del gradiente o el método analítico directo no pueden emplearse. Estatécnica es de gran interés en los problemas de optimización de funciones combinatoriaso de valores reales donde la superficie de optimización o entorno de adaptación tieneun aspecto rugoso, es decir, presenta múltiples soluciones localmente óptimas.La PE, de forma similar a lo visto para los AG, se basa en la suposición que unentorno de adaptación puede ser caracterizado por un conjunto de variables, y que existeuna solución óptima del problema en términos de dichas variables. Por ejemplo, si setrata de determinar el camino más corto en el problema del viajante, cada solución seríaun camino. La longitud de ese camino podría ser expresada como un número, quepodría servir como medida de la adaptación. El entorno de adaptación de este problemapodría definirse como la hipersuperficie proporcional a la longitud de los caminos en unespacio de caminos posibles. El objetivo sería encontrar el camino de menor longitud endicho espacio.La PE básica se compone de las siguientes tres etapas, que se repiten hasta que elnúmero de iteraciones alcanza un valor máximo establecido de antemano o se encuentrauna solución adecuada:- Elección de una población inicial de forma aleatoria. El número de solucionesen una población influye de manera decisiva en la velocidad del proceso deoptimización, pero no existen respuestas sobre cual es el número de solucionesapropiadas y cuál es excesivo.- Cada solución se replica en una nueva población. Cada uno de estosdescendientes se modifican de acuerdo con la distribución de los tipos demutaciones, desde el mínimo cambio posible hasta el máximo.- Se determina la adaptación de cada una de las nuevas soluciones y se conservanlas n mejores o las n primeras, escogidas al azar entre las mejores, paraconstituir la siguiente población.Existen dos claras diferencias entre la programación evolutiva y los algoritmosgenéticos. Primero, no existe ninguna restricción en la representación. El AG típicosupone la codificación de las soluciones del problema como una cadena de elementos otokens representativos, el denominado genoma. Por el contrario, en la PE larepresentación se deriva del propio problema. Por ejemplo, una red neuronal puede ser170
epresentada de la misma forma en que es implementada, ya que la operación demutación no exige una codificación lineal.En segundo lugar, la operación de mutación simplemente modifica determinadosaspectos de la solución de acuerdo con una distribución estadística que da más peso alas pequeñas variaciones en los descendientes, y menos importancia a los cambiossignificativos a medida que se acerca al óptimo global. Existe en esta afirmación unatautología implícita: si el óptimo global no es conocido aún, ¿cómo puede seramortiguado el efecto de las mutaciones a medida que nos acercamos a él? Para resolveresta dificultad, se han propuesto e implementado varias técnicas, la más extendida es lameta-evolutiva, en la que la varianza de la distribución de las mutaciones está sometidaa modificación según un operador mutante de varianza fija, evolucionando de estaforma con la solución.Las operaciones de cruce como abstracción de la recombinación sexual ha sidocuestionada en varios frentes por la comunidad PE.Así, (Atmar [109]) critica el uso de esta terminología, ya que el cruce es unproceso que tiene lugar antes que el sexo durante la división meiótica de la célula y supapel en la evolución no está todavía muy claro. Más allá de la mera cuestiónsemántica, frente a la concepción comúnmente aceptada, en la que el sexo actúa comoun acelerador de la diversidad, él propone que el sexo actúa como un mecanismo deeliminación de los defectos genéticos contenidos en la herencia.Argumenta, además, que la codificación simplista de los parámetros en losproblemas de optimización realizada por los algoritmos genéticos, donde un rasgo esequivalente a un determinado patrón o conjunto de símbolos del genoma, no representaadecuadamente el proceso de la selección natural y oculta causa y efecto. Él propone,por el contrario, una selección al nivel del fenotipo. Así, Atmar caracteriza elplanteamiento PE por la variación a este nivel, sin tener en cuenta la representación aniveles más bajos, mientras que los AG celebran el alcance de una solución óptimamediante la exclusión potencial de los detalles en la codificación.Se han realizado varias evaluaciones sobre la importancia de la operación decruce, pero todas sugieren que el valor de esta operación no está claro todavía.Un ejemplo de pseudo-código correspondiente a un PE se recoge en el siguientelistado:171
ÈEl algoritmo PE es// empieza con un tiempo inicialt := 0;// inicia una población de individuos, generalmente de forma aleatoriaIniciaPoblación P(t);// evalúa la adaptación de todos los individuos de la población inicialEvalúa P(t);// comprueba el criterio de terminación (tiempo, adaptación, etc.)mientras no acabado haz// aumenta el contador de tiempot := t + 1;// modifica estocásticamente toda la poblaciónP' := Muta P(t);// evalúa la nueva adaptaciónEvalúa P'(t);// selecciona los supervivientes por su adaptaciónP := Sobrevive P,P'(t);fin mientrasfin PE´É¬ÇH¸AÄA¿Bʇ¹"4 »§ÖÉKÅAAÄA¿‚ÁIÂAÄA´µA¿BµAÅA½‡ÍA·L´ÁK¿BÄAÅBA½A¸5#%!" "#%6"'(6"./$ 78,(92:!8 ;"& $%:¦6En este punto cabe indicar que la PE no hace uso del proceso de cruce comooperador genético.172
þ–ü¢£û£ý¦¥¨§3pþ–þ¢En 1963, dos estudiantes de la Universidad Técnica de Berlín (TUB) seconocieron y pronto empezaron a colaborar en experimentos que empleaban el túnel deviento del Institute of Flow Engineering. Durante la búsqueda de formas óptimas paralos objetos introducidos en un flujo, que por aquel entonces era una cuestión delaboriosa experimentación intuitiva, concibieron la idea de operar estratégicamente. Sinembargo, las estrategias basadas en las coordenadas o el gradiente simple no tuvieronningún éxito. Entonces, uno de los estudiantes tuvo la idea de introducir cambiosaleatorios en los parámetros que caracterizaban la forma del objeto, siguiendo elejemplo de las mutaciones en la naturaleza. Nacía así la estrategia evolutiva. Un tercerestudiante se unió a ellos y comenzaron la construcción de un experimentadorautomático, que trabajaría de acuerdo con unas reglas simples de mutación y selección.Por tanto, la estrategia evolutiva (Rechenberg [53]) fue inventada para resolverproblemas técnicos de optimización, siendo una técnica conocida sólo por losingenieros civiles como solución alternativa a los planteamientos convencionales.Generalmente no existe una función analítica objetiva para la solución de estosproblemas, por lo que no existe un determinado método de optimización aplicable encada caso, salvo la propia intuición del ingeniero.Los primeros intentos para imitar la evolución orgánica mediante el uso decomputadoras todavía recuerdan los métodos de optimización iterativos conocidos hastala época. En una estrategia evolutiva de dos miembros o EE(1+1), cada padre produceun descendiente en cada generación mediante la aplicación de mutaciones normalmentedistribuidas, es decir, los pasos pequeños son más probables que los pasos grandes,hasta que un hijo lo hace mejor que su padre y ocupa su lugar. Debido a esta estructuratan sencilla, se pueden obtener resultados teóricos sobre la velocidad de convergencia yel control de la magnitud de los pasos. Así, una de las reglas descubiertas durante laexperimentación para dos funciones objetivo unimodales (el modelo esférico y elmodelo de tunel) es que la relación entre las mutaciones exitosas y el total demutaciones debía ser de 1/5. Esta relación ha sido confirmada posteriormente por otrosinvestigadores (Voigt y Born [115]).Este primer algoritmo, que hace uso únicamente de la mutación, ha sido mejoradopara obtener una EE(µ+1) donde se hace uso de la recombinación gracias a la existenciade µ padres. El esquema de mutación y el control de la magnitud de los pasos setrasladó de un método a otro sin modificación.Posteriormente, se generalizaron estas estrategias imitando los siguientesprincipios de la evolución orgánica: una población posibilita el proceso de173
Èrecombinación con un emparejamiento aleatorio, mutación y selección. Así, en laEE(µ+λ), la generación parental es tenida en cuenta durante el proceso de selección,mientras que en la EE(µ,λ) únicamente los descendientes sufren el proceso de selección.Generalmente, se denota por µ el tamaño de la población, y por λ el número dedescendientes producidos en cada generación. Para expresarlo de otra forma:El algoritmo EE es// inicia una población de individuos, generalmente de forma aleatoriaIniciaPoblación P(t);// evalúa la adaptación de todos los individuos de la población inicialEvalúa P(t);// comprueba el criterio de terminación (tiempo, adaptación, etc.)mientras no acabado haz// modifica estocásticamente toda la poblaciónP' := Muta_Recombina P(t);// evalúa la nueva adaptaciónEvalúa P'(t);// selecciona los supervivientes por su adaptaciónsi EE(µ,λ) hazP := Sobrevive P'(t);si EE(µ+λ) hazP := Sobrevive P,P'(t);fin mientrasfin EE´ É ÇH¸AÄA¿b܇Ø"4 »§Ö"ÉKÅAAÄA¿BÁKÂAÄA´µA¿BµAÅA½AÍA·´ÁK¿BÄAÅBA½‡¸9>=/& #?6"& *" "$ 6(9@:¦!" ;"&A$B:¦6Sin embargo, el trabajo con EE puede resultar arduo debido a la gran cantidad deteoría probabilística y estadística aplicada que es necesario dominar para comprendersus entresijos. Por ello, se presenta a continuación un sencillo ejemplo que explica deuna manera sencilla la forma de trabajo de este tipo de algoritmo evolutivo.Un individuo perteneciente a la población de un problema EE está constituido porel siguiente genotipo, que representa un punto en el espacio de búsqueda:- Variables objeto: las variables reales x i deben ser sintonizadas medianterecombinaciones y mutaciones de tal forma que la función objetivo alcance suóptimo global- Variables estratégicas: las variables σ i o pasos medios determinan la mutabilidadde las x i . Ellas representan la desviación estándar de una distribución normalN(0, σ i ) siendo añadidas a las x i como una mutación indirecta. Con un valornulo de la esperanza, los padres producirán una descendencia con característicasmedias similares a las de ellos. Por otro lado, con el fin de que la magnitud delos pasos crezca o disminuya con la misma probabilidad, los valores σ i mutan,de una generación a otra, siguiendo una distribución normal exponencial (e N ).Estos valores cambiantes ocultan el modelo interno que la población ha hecho desu entorno, es decir, la auto adaptación ha reemplazado el control externo de lasEE(1+1).Este concepto funciona porque, tarde o temprano, la selección prefiere aaquellos individuos que han construido un buen modelo de la función objetivo,174
produciendo con ello una mejor descendencia. Por lo tanto, el aprendizaje tienelugar en dos niveles diferentes: 1) al nivel del genotipo, es decir, al nivel de lasvariables objeto y estratégicas, y 2) al nivel del fenotipo, es decir, al nivel de laadaptación.Dependiendo del valor de las x i para cada individuo, la función objetivoresultante f ( x ) , donde x denota el vector de variables objetivo, sirve comofenotipo (adaptación) en la etapa de selección. En una EE(µ+λ), los µ mejoresde los µ+λ individuos sobreviven para convertirse en padres de la siguientegeneración. Sin embargo, en la EE(µ,λ) la selección tiene en cuenta sólo a los λindividuos que constituyen la descendencia. Este segundo esquema es másrealista y por lo tanto más exitoso, ya que ningún individuo puede sobrevivirpara siempre, lo que teóricamente puede ocurrir en las EE(µ+λ). Aunque no estípico su uso dentro de los problemas convencionales de optimización, unaEE(µ,λ) que permita el deterioro intermedio funciona mejor. Únicamentemediante el descarte de los individuos altamente adaptados puede tener lugaruna adaptación permanente de la magnitud de los pasos y, por lo tanto, se evitanlargas fases de estancamiento debidas a valores de σ i desadaptados. Estosignifica que tales individuos han construido un modelo interno que no esapropiado para un progreso futuro de la población, por lo que debe serdescartado.Mediante la selección de una determinado proporción µ/λ se puede determinar laconvergencia de la EE: Si se desea una convergencia rápida, pero local se debeelegir un proceso de selección corto y duro, p.e. (5,100); pero si desea obtenerun valor óptimo global se debe buscar una selección más blanda, p.e. (15,100).La auto adaptación dentro de la EE depende de los siguientes agentes:- Aleatoriedad: No se puede implementar la mutación como un simple procesoaleatorio. Esto significaría que un hijo es completamente independiente de suspadres.- Tamaño de la población: La población ha de ser lo suficientemente extensa. Nose debe permitir únicamente la reproducción de los mejores, sino la de unconjunto de individuos válidos. Los biólogos han acuñado el termino variedadrequerida para indicar la necesidad de una variedad genética que prevenga a lasespecies de una degeneración genética creciente que acabaría con ellaseventualmente.- Cooperación: Con el fin de explotar los efectos de una población compuesta pormás de un individuo, estos deben recombinar sus conocimientos (cooperar) yaque no se debe esperar que el conocimiento se acumule sólo en los individuosmejor adaptados.175
- Deterioro: La mejora del desarrollo futuro depende de los modelos internos decada individuo (magnitud de los saltos mutantes), por lo que se debe permitir undeterminado deterioro de una generación a otra. En la naturaleza, una forma devida limitada no es un signo de fracaso, sino un importante medio de prevenir elcongelamiento genético de la especie.Las EE han demostrado su éxito frente a otros métodos iterativos en un grannúmero de problemas (Schwefel [59]). Son muy adaptables a casi todos los tipos deproblemas de optimización, ya que requieren muy poca información acerca delproblema; por ejemplo, no es necesario conocer las derivadas de la función objetivo. Lafunción objetivo puede incluso no estar definida en dominios cerrados, como es el casode las funciones derivadas de los procesos de simulación. Esto es aplicable también alas restricciones que pueden representar el resultado de un estudio por el método de loselementos finitos. Las EE han sido adaptadas también a problemas de optimizaciónvectorial (Kursawe [121]), y pueden servir como proceso heurístico en los problemascombinatorios np-completos como el problema del viajante o problemas con unasuperficie de repuesta ruidosa o cambiante.176
ü–ý ü2£§þ20§ÿü öøú§üý ý¬ö¤§©^÷¡bþü¡üöCLa forma más sencilla de explorar la naturaleza de los sistemas clasificadores, sinentrar a discutir las ideas propuestas por (Holland [56,60,84,85,106,119]), es seguir lalínea animat (animal + robot = animat) propuesta por (Booker [65]) en 1982 yestudiada más a fondo posteriormente por (Wilson [83]), quien acuño el términoanimat. El trabajo en este ámbito continua hoy en día, pero bajo el epígrafe de VidaArtificial y no de computación evolutiva.Sin embargo, los sistemas clasificadores pueden considerarse como descendientesdirectos de las ideas de Holland, y pueden verse como una de las primeras aplicacionesde los AG, donde se emplea este tipo de algoritmos evolutivos para adaptar el sistema alos cambios del entorno, como se explica con mayor detalle a continuación.Holland deseaba un sistema de conocimiento capaz de clasificar losacontecimientos que tenían lugar en su entorno y luego reaccionar frente a ellosapropiadamente. Entonces, ¿qué era necesario para construir tal sistema? Obviamente,era necesario (1) un entorno, (2) receptores que informaran al sistema de losacontecimientos exteriores, (3) actuadores que permitieran al sistema manipular suentorno, (4) el propio sistema, de momento una caja negra, que tendría conectados a él(2) y (3), y que vive en (1).En el planteamiento animat, 1) es un mundo digital creado de forma artificial,como la malla bidimensional propuesta por Booker en el sistema Gofer, que contienecomida y veneno. Donde el propio Gofer trata de (a) aprender a distinguir entre estosdos tipos de objetos, y (b) sobrevivir bien alimentado.Imagínese un animat muy simple, por ejemplo, un modelo simplificado de rana,que tiene por entorno una pequeña charca (1). Este modelo tiene ojos, es decir,detectores sensoriales de entrada (2); manos y piernas, es decir, manipuladores delentorno (3); es un dispositivo de detección y captura de moscas, es decir, una rana (4);por lo tanto, se tienen ya todas las piezas necesarias.La caja negra más primitiva que se puede imaginar es una computadora. Tienedispositivos de entrada (2), de salida (3), y un sistema de transmisión de mensajes entrelos dos que convierte (es decir, computa), determinados mensajes de entrada enmensajes de salida, de acuerdo con un conjunto de reglas, generalmente denominadasprograma de la computadora. De la teoría de las Ciencias de Computación, se toma lamás sencilla de las estructuras de programación, esto es, algo llamado sistema deproducción, o SP para abreviar. (Post [4]), y posteriormente (Minsky [39]) demostraronque un SP era computacionalmente completo. A pesar que sólo está constituido por unconjunto de reglas si-entonces, se parece bastante a una computadora completa.177
Cada una de las reglas si-entonces recibe el nombre de clasificador, y debe teneruna representación que permita un fácil manejo, por ejemplo, como cadenas binarias. Elconjunto de todas las reglas se denomina población de clasificadores. Es obvioentonces, como se pueden obtener nuevas reglas para este sistema, basta hacer uso de unAG para generar nuevas reglas/clasificadores a partir de la población actual.Todo lo que queda ahora, son los mensajes que atraviesan la caja negra. Estosdeben ser también sencillas cadenas de ceros y unos, que se guardarán en una estructurade datos llamada lista de mensajes.Con todo esto, se puede imaginar el funcionamiento interno de la caja negra comosigue: El dispositivo de entrada (2) genera mensajes, es decir, cadenas de 0/1, que seescriben en la lista de mensajes. Luego, todos estos mensajes son contrastados con laparte condicional de cada uno de los clasificadores para averiguar qué acciones debenser activadas. A continuación se vacía la lista de mensajes, siendo ocupada por lasacciones codificadas, que son también mensajes. Por último, el dispositivo de salida (3)extrae de la lista aquellos mensajes que afectan a los actuadores, comenzando de nuevoel ciclo.Cabe destacar, que con esta configuración es posible tener mensaje internos, yaque la lista de mensajes no se vacía después que (3) la ha comprobado, por lo que, losmensajes procedentes del dispositivo de entrada en el siguiente ciclo son añadidos alfinal de la lista.La idea general de los SC es empezar desde cero, sin ningún conocimiento previo,empleando una población de clasificadores generada al azar, permitiendo que el sistemaaprenda por inducción su propio programa (Holland [85]). Esto reduce la cadena deentrada a un conjunto de patrones recurrente, que debe ser repetido una y otra vez, parapermitir que el animat clasifique su situación/contexto actual y reaccione de formaapropiada a los acontecimientos.Reglas InternasPor ejemplo, el comportamiento de la rana consiste básicamente en moversealeatoriamente en la micronaturaleza digital que constituye su entorno. Siempre que unpequeño objeto volador aparece, si no tiene franjas, la rana debe comerlo, porque esmuy posible que sea una jugosa mosca o cualquier otro insecto volador. Si tiene franjas,es mejor dejar en paz al insecto, porque podría tratarse de una abeja o una avispa. Sinembargo, si la rana se tropieza con un objeto sospechosamente grande, debe utilizar susactuadores inmediatamente para alejarse de él lo más posible.Estas pautas de comportamiento pueden representarse por las siguientescondiciones si-entonces:178
SI objeto pequeño, volador a la derecha ENTONCES enviar @SI objeto pequeño, volador a la izquierda ENTONCES enviar %SI objeto pequeño, volador en el centro ENTONCES enviar $SI objeto grande, sospechoso ENTONCES enviar |SI no objeto grande, sospechoso ENTONCES enviar *SI * y @ ENTONCES girar la cabeza 15 grados a la derechaSI * y % ENTONCES girar la cabeza 15 grados a la izquierdaSI * y $ ENTONCES avanzar en la dirección actualSI | ENTONCES avanzar rápidamente en la dirección opuesta a la actualAhora, este conjunto de reglas debe ser codificado para poder ser empleado dentrode un sistema clasificador. Una posible codificación puede ser la siguiente, la partecondicional está compuesta por dos condiciones que pueden ser combinadas medianteun Y lógico, de tal forma que ambas deben verificarse para que la acción asociada seactive. Esta estructura necesita un operador NO, (por lo tanto, se emplea un operadorNAND y es bien sabido que cualquier computadora puede construirse únicamente conoperadores NAND), que en la notación empleada se indica por el prefijo ‘-’:IFTHEN0000, 00 00 00 000000, 00 01 00 010000, 00 10 00 101111, 01 ## 11 11-1111, 01 ## 10 001000, 00 00 01 001000, 00 01 01 011000, 00 10 01 101111, ## ## 01 11Obviamente, la cadena ‘0000’ denota pequeño, y ‘00’ en la primera parte de lasegunda columna indica volador. Los últimos dos bits de la segunda columna indican ladirección de acercamiento del objeto, donde ‘00’ significa derecha, ‘01’ significaizquierda, etc.En la regla número 4, se emplea el símbolo no importa ‘#’ que acepta ambosvalores, 0 y 1, es decir, la posición del objeto grande y sospechoso es completamenteindiferente. Un sencillo hecho que puede salvar la vida digital de la rana.Un ejemplo de pseudo-código de sistema clasificador sin aprendizaje se recoge enel listado 21.Para convertir este algoritmo en otro con aprendizaje son necesarias las siguientesdos etapas (Holland [84]):- El ciclo principal debe ser cambiado para que la activación de cada clasificadordependa de algunos parámetros adicionales, que serán modificados comoresultado de la experiencia, es decir, existe un refuerzo desde el entorno dedeterminadas acciones.- y/o cambiar el contenido de la lista de clasificadores, o sea, generar nuevasreglas/clasificadores mediante la eliminación, adición o combinación de lasacciones y condiciones correspondientes a los clasificadores existentes.179
ÈÈUn Algoritmo SCs es// empieza con un tiempo inicialt := 0;// crea la lista de mensajes vacíaIniciaListaMensajes LM(t);// genera al azar una población de clasificadoresIniciaPoblaciónClasificadores P(t);// verifica la condición de finalización (tiempo, adaptación, etc.)mientras no Acabado haz// incrementa el contador de tiempot := t + 1;// 1.- comprueba si hay mensajes de entradaLM := LeeDetectores (t);// 2.- compara LM con los clasificadores y guarda las comparaciones// positivasLM’ := ComparaClasificadores ML,P(t);// 3.- procesa los nuevos mensajes a través de los dispositivos de// salidaML := EnviaActuadores ML’(t);fin mientrasfin SCs´ É ÇH¸AÄA¿b܇Ê"4 »§Ö"ÉIÅAAÄA¿BÁKÂAÄA´µA¿BÄAÅBA½D>$ =/&A*"'(6E< 6"=/$ F $ .G6"H"!"#I"#%*","H"$ J/6LK%*El algoritmo anterior quedaría de la siguiente manera:Un Algoritmo SCc es// empieza con un tiempo inicialt := 0;// crea la lista de mensajes vacíaIniciaListaMensajes LM(t);// genera al azar una población de clasificadoresIniciaPoblaciónClasificadores P(t);// verifica la condición de finalización (tiempo, adaptación, etc.)mientras no Acabado haz// incrementa el contador de tiempot := t + 1;// 1.- comprueba si hay mensajes de entradaLM := LeeDetectores (t);// 2.- compara LM con los clasificadores y guarda las comparaciones// positivasLM’ := ComparaClasificadores ML,P(t);// 3.- los clasificadores con mayor prioridad recogidos en LM’ ganan// la carrera y envían sus mensajesLM’ := SeleccionaClasificadoresPrioritarios ML’,P(t);// 4.- penaliza la fuerza de los clasificadores que envían mensajesLM’ := PenalizaClasificadores ML’,P(t);// 5.- procesa los nuevos mensajes a través de los dispositivos de// salidaML := EnviaActuadores ML’(t);// 6.- recibe la respuesta del entorno (refuerzo)R := RecibeRefuerzo (t);// 7.- distribuye el refuerzo entre los clasificadoresP’ := DistribuyeRefuerzo R,P(t);// 8.- eventualmente, dependiendo de t, un AE (generalmente un AG)// se aplica a la población de los clasificadoressi criterio entoncesP := GeneraNuevasReglas P’(t);sinoP := P’fin mientrasfin SCc´ É ÇH¸GÄA¿B܇Ü"4 »§ÖÉKÅAAÄA¿BÁKÂAÄA´µA¿BÄAÅBA½D$ =G& *"'(6E< 6"=/$ F $ ./6"HM!"#NEO!",(I"#?*","H"$ JG6LKB*180
³£´µAA·¸BʇÊAÊ"4 »SMTÅAÀ‚ÆAÌ ¿BÄAÅBÃA·%UA¿AÌKÄAÅBÁK¿A½¡ÇH·L¿AÌKÆA¸A·L¸B̸B¿AÆAÅA·¸AÁK´ ÂA½B¸"VWU"XzÁ¡B÷¡(§0§öøý¦13ùP3þ–ùQ2£§ý¬ö¤§3 RLa programación genética es la extensión del modelo de aprendizaje genético enel espacio de los programas. Es decir, los objetos que constituyen la población no soncadenas de longitud fija donde se codifican las posibles soluciones del problema, sinoque son programas que, cuando son ejecutados, generan las posibles soluciones delproblema. Estos programas se representan en programación genética como arboles decontrol, y no como líneas de código propiamente.Así, por ejemplo, un simple programa como ‘a+b*c’ se representaría como:+a*bco, de una forma más precisa, como un conjunto de estructuras de datos adecuadas quese conectan entre si para conseguir un determinado efecto. Ya que esto se puede realizarde una forma muy sencilla en el lenguaje Lisp, la mayoría de los programadores quehacen uso de esta técnica recurren a él. Sin embargo, esto es un mero detalle de laimplementación. Existen métodos más directos que no emplean el Lisp como entornode programación.Los programas que constituyen la población están compuestos por elementosescogidos entre el conjunto de las funciones y el conjunto de símbolos, que songeneralmente conjuntos fijos de símbolos seleccionados por su idoneidad para lasolución de problemas dentro del dominio de interés.En la programación genética, la operación de cruce se implementa mediante laelección aleatoria de sub-árboles, de acuerdo con la adaptación de cada individuo, quese intercambian posteriormente. Cabe indicar, que la PG no hace uso generalmente de lamutación como operador genético.181
öC¡bý¦£þ¢¡bý ÷3ü©^þ©¨§Y÷Las estructuras situadas en la superficie pueden verse afectadas por la subsidencia,que está caracterizada por los siguientes parámetros:- Desplazamiento vertical.- Desplazamiento horizontal.- Pendiente de la cubeta, es decir, la derivada del desplazamiento vertical respectoa la horizontal.- Deformaciones horizontales, es decir, la derivada de los desplazamientoshorizontales respecto a la horizontal.- Curvatura vertical, que puede ser aproximada por la derivada de la pendiente opor la segunda derivada del desplazamiento vertical respecto a la horizontal.El daño producido en las estructuras es debido generalmente a una combinaciónde estos fenómenos básicos. Estos parámetros, por lo tanto, constituyen la base para lapredicción de daño en las estructuras.Limitar la deformación del terreno hace referencia únicamente a aquellosparámetros de la subsidencia que no dan lugar a daños permanentes en las estructuras,independientemente del futuro uso que se haga de ellas. Por lo tanto, de esta definiciónse extrae que sí es posible un mínimo movimiento del terreno y que sus límites estáncondicionados por las características constructivas de la estructura, así como por sufuturo uso. En otras palabras, las restricciones deben ser más severas en estructurascríticas como las estaciones de seguimiento de satélites, los edificios públicos, losmonumentos, los asentamientos industriales, etc., mientras que en estructuras pocousadas, los límites pueden ser menos exigentes. Incluso, estas restricciones pueden sereliminadas en aquellas estructuras construidas para resistir los efectos de la subsidencia.Las estructuras sometidas a los movimientos originados por los fenómenos desubsidencia pueden experimentar flexiones, distorsiones, torsiones, contracciones oextensiones, inclinaciones y traslaciones en diferentes grados dependiendo de lascondiciones del lugar. Generalmente estos movimientos se manifiestan como diferentestipos de daños. Usualmente la naturaleza y el grado de las deformaciones estructuralesvaría a lo largo de la estructura en respuesta a los cambiantes movimientos del terreno.Se ha observado que la deformación de los edificios originada por movimientosdel terreno comienza al nivel de la cimentación propagándose al resto de la superestructuraposteriormente. Esta transmisión depende de la naturaleza de la estructura, enparticular, de su continuidad y del tipo de uniones.El desarrollo de unos criterios de daño en superficie apropiados implica lassiguientes cuatro etapas, muy relacionadas entre si:182
1. Formulación de las condiciones de daño: La definición de las condiciones quesupondrán un daño en las estructuras es un requisito previo, ya que permitirá definir quedaño causará en cada uno de los tipos de estructuras que puede estar afectado por lasubsidencia. Se pueden definir, entonces, como aquellas condiciones que conducen a unuso perjudicial o amenazan la seguridad de la estructura2. Selección de los parámetros apropiados: La mayoría de las estructuraspresentan diferentes grados de susceptibilidad frente a los distintos tipos demovimientos del terreno. Por ejemplo, una estructura de gran altura se verá másafectada por la inclinación del terreno, mientras que una estructura de poca altura y másalargada será más susceptible a las deformaciones horizontales. Es, por tanto, necesarioseleccionar un conjunto de parámetros que permitan predecir el impacto de lasubsidencia en una determinada construcción.3. Cuantificación de los movimientos del terreno permisibles: Esta etapa suponeestablecer los límites cuantitativos de los parámetros escogidos en la etapa anterior paralos tipos fundamentales de edificios y grados de daño. Generalmente es difícilestablecer un límite definitivo, por lo que se recurre a un rango de valores.4. Correlación de los efectos en superficie y las labores subterráneas: Unaaplicación fundamental de los criterios de daño reside en el diseño de las laboressubterráneas en zonas ocupadas por estructuras y edificios que pueden ser dañados. Estosupone la correlación de los movimientos del terreno con la geometría de las labores,con los métodos de explotación en el caso de labores mineras y con la geología de lazona afectada. La eficacia de los criterios de daño en superficie depende en gran medidade la buena correlación entre los movimientos del terreno y la geometría de las laboressubterráneas.Es bien sabido que sólo una fracción de las deformaciones y distorsiones del terrenoson transferidas a la estructuras. El grado de transferencia es función de unconjunto de variables complejas como las características propias del suelo y de lasestructuras. Los criterios expuestos no tienen en cuenta esta interacciónsuelo-estructura, así como tampoco se detallan las características de los distintoscomponentes estructurales. Por tanto la aplicabilidad de estos criterios varía de unaestructura a otra.Por otro lado, la categorización de los edificios se ha basado únicamente en lascaracterísticas de la superestructura, existiendo discrepancias en aquellos casos en losque aparecen daños en otras partes del edificio. Tampoco se han realizado distincionesentre las deformaciones a tracción o a compresión del terreno. Generalmente, son lasdeformaciones a tracción las que causan un mayor daño en los edificios, por lo que son183
estas las que más se han tenido en cuenta al evaluar los datos sobre deformacioneshorizontales.En definitiva, cabe señalar que los límites cuantitativos recogidos en estoscriterios son aproximados y sirven sólo como guías a la hora de establecer el posibledaño que causará en los edificios afectados una determinada explotación.Criterios de daño propuestosComo paso previo al establecimiento de los criterios de daño, se realizará unatipificación tanto de las instalaciones como de los posibles daños que estas puedanpresentar.Las instalaciones pueden dividirse en cuatro grandes grupos:DescripciónCategoría- Estructuras de ladrillo y poca envergadura. 1- Estructuras de acero y hormigón armado. 2- Estructuras flexibles (madera). 3- Estructuras de gran rigidez. 4Zm¸"UAÌ ¸BʇÜ"4 »£Ùm¸¡ÇHÅAµA¿A·LÐ ¸AÉsÄAÅ(S"ÄA´¾H´ÁK´ ¿AÉsÖ"·L¿AÆAAÅAÉ ÇH¸AÉComo la principal aplicación de estos criterios es la estimación de los posiblesdaños debidos a la subsidencia de una zona amplia de terreno, esta clasificación permiteagrupar las instalaciones de la zona afectada de una forma sencilla y rápida.Por lo que se refiere a los daños, estos pueden agruparse de forma genérica en lossiguientes tres grupos:- Daños arquitectónicos caracterizados por la presencia de grietas de pequeñotamaño en el recubrimiento de paredes, ventanas y puertas.- Daños de tipo funcional caracterizados por la inestabilidad de algunos elementosestructurales como puertas y ventanas atascadas, rotura de cristales, etc.- Daños de tipo estructural caracterizados por el deterioro y posible colapso de loselementos primarios de la estructura. Estos suponen generalmente una reconstrucción agran escala, incluso total, de la estructura.Es importante resaltar que aunque el riesgo de colapso de la estructura se asociaen esta clasificación únicamente con el nivel de daño estructural, el grado de distorsiónasociado a los otros tipos de daño pueden suponer un riesgo para las personas enalgunos casos.son:Por otro lado, los parámetros escogidos para la definición de los criterios de daño184
Zm¸"UA̸BÊAÎ"4 »§Ö"¸A·LÃAÀ‚Å¡ÇH·L¿AÉsÄAÅB̸([""UAÉI´ÄAÅA½AÁK´ ¸Parámetro Símbolo Unidades- Distorsión Angular DA x 10 -3- Deformación horizontal DH x 10 -3- Flexión F x 10 -3- Radio de Curvatura RC KmEs ventajoso el uso de varios parámetros ya que, dependiendo de su aplicación,unos pueden tener más importancia que otros. Así, la distorsión angular se distingue delos asentamientos diferenciales en que estos no tienen en cuenta las rotaciones de loscuerpos rígidos, mientras que la distorsión angular da una indicación de las deformacionesverticales relativas.Por último los límites cuantitativos obtenidos a partir de la documentaciónexaminada se recogen en la tabla 14. En algunos casos, la categoría de la estructura a laque se refería un determinado dato no ha podido ser determinada por lo que se haomitido.Fuente Localización Categoría de laInstalaciónCategoría delDañoTipo deMovimientoValores PermitidosNIEMCZYK (1949) ALEMANIA 1.0-2.0MEYERHOFF (1953) 0.5-1.0SKEMPTON & McDONALD (1957) 1.0-2.0POLSHIN & TOKAR (1957) C.E.I. 1.0SOWERS (1962) EE. UU. 1 ARQU. DA 1.0-2.0O'ROURKE (1976) EE. UU. 1.0ATTEWELL (1977) EE. UU. 1.0BOSCARDIN (1980) EE. UU. 1.2NIEMCZYK (1949) ALEMANIA 0.6BEEVERS & WARDELL (1954) REINO UNIDO 0.4POLSHIN & TOKAR (1957) C.E.I. 0.5PRIEST & ORCHARD (1958) REINO UNIDO 0.8GOTO (1968) JAPÓN 1 ARQU. DH 0.5SINGH & GUPTA (1968) INDIA 0.4-0.5LITTLEJOHN (1975) REINO UNIDO 0.25NCB (1975) REINO UNIDO 0.5-1.0O'ROURKE (1975) EE. UU.
Zm¸"UA̸bʇÝ"4 »\"¸AÌ ¿A·ÅAÉ^]‚áۧ´ÀB¿AÉsÄAÅBÌ ¿AÉsÖ"¸A·LÃAÀBšǘ·L¿AÉÈVNIMI (1958) C.E.I. 2.0-4.0ULRICH (1974) 1 FUNC. DH 1.0CORDING ET AL (1978) EE. UU. 2.5-3.5ADAMEK ET AL (1982) POLONIA 1.5RIGBY & DEKOMA (1952) 0.14-0.22WOOD (1952) 1 FUNC. F 0.25HORNE & LAMBE (1964) EE. UU. 0.6VNIMI (1958) C.E.I. 3-20ULRICH (1974) 1 FUNC. RC 20ADAMEK (1982) POLONIA 20NISHIDA ET AL (1982) JAPÓN 13O'ROURKE ET AL (1977) EE. UU. 1 ESTRUC. DA 7.0-8.0NCB (1975) REINO UNIDO 1 ESTRUC. DH 3.5BOSCARDIN (1980) EE. UU. 2.75SKEMPTON & McDONALD (1956) EE. UU. 1.0-2.0POLSHIN & TOKAR (1956) C.E.I. 2.0SOWERS (1962) EE. UU. 2.0-2.5BRETH & CHAMBOSSE (1975) 2 ARQU. DA 2.2O'ROURKE (1976) EE. UU. 1.3ATTEWELL (1977) EE. UU. 2.0THOMAS (1953) 2.5-3.3SKEMPTON & McDONALD (1956) EE. UU. 2 FUNC. DA 3.3-6.6STARZEWSKI (1974) POLONIA 3.3-5.0MAHAR & MARINO (1981) EE. UU. 3 ARQU. DA 2.0GOTO (1968) JAPÓN 3 ARQU. DH 1.0STARZEWSKI (1974) POLONIA 3 FUNC. DA 5.0-10.0BROMS & FREDRIKSSON (1976) SUECIA 3.3-5.0Los criterios propuestos se recogen en la tabla 15. Así, para una determinada categoríade edificio y un nivel dado de daño se señala el rango de valores admisible paracada uno de los cuatro parámetros evaluados. Cabe señalar que los criterios propuestosestán basados en los datos obtenidos en la bibliografía manejada, por lo que la validezde estos depende en gran medida de la fiabilidad de las distintas fuentes consultadas.DA (x 10 -3 ) DH (x 10 -3 ) F (x 10 -3 ) RC (Km)CategoríaEdificio1234Nivel de DañoARQU.FUNC.ESTRUC.ARQU.FUNC.ESTRUC.ARQU.FUNC.ESTRUC.ARQU.FUNC.ESTRUC.Rango deValores0.5-2.02.0-6.07.0-8.01.0-2.52.5-6.6-2.03.3-10.0----ValorRecomendado1.02.5-3.07.01.33-3-1.53.3-5.0----Rango deValores0.25-1.51.0-4.02.75-3.5---1.0-----ValorRecomendado0.51.5-2.03.0---1.0-----Rango deValores0.3-1.00.14-0.6----------ValorRecomendado0.30.5----------Rango deValores-3-20----------ValorRecomendado-20----------- Indica dato no disponible.Ð ÀB´ÇHÅAÉEÄAÅBÌ¿AÉEÆA¸A·ÃAÀBÅ¡ÇH·L¿AÉZj¸"UG̸Bʇº"4 »£Ùn·´ÇHÅA·´ ¿AÉsÄAÅBÓn¸"_A¿BÅA½(S"ɬÇH·AÁ¬ÇHA·¸AÉG`186
ú>ý¬ü¢£
a ì a äìåcbñßõáòß
[1] DIE THEORIE DER BODENSENKUNGEN IN KOHLENGEBIETEN.Goldreich, AJ. Springer1913. Berlín[2] DIE BERECHNUNG DER BODENSENKUNGEN IM EMSCHERGEBIET.Keinhorst, H.Festschrift 25 Jahre Emschergenossenschaft1925. Essen[3] BEITRAG ZUR FRAGE DER VORAUSBERECHNUNG BERGBAULICHERSENKUNGEN.Bals, R.Mitt. Markscheidew 42/431932. pp 98-111[4] FORMAL REDUCTIONS OF THE GENERAL COMBINATORIAL DECISIONPROBLEMPost, E.L.American Journal of Mathematics, 651943. pp 197-268[5] A TREATISE ON THE MATHEMATICAL THEORY OF ELASTICITY.Love, A.E.H.1944. New York[6] SURFACE MOVEMENT DUE TO MINING.King, H.G.; Smith, H.G.J. Leeds Univ. Min. Soc, 301954. Leeds. pp 127-136[7] VORUSBERECHNUNG VON BODENBEWGUNGEN.Schleier, O.Vermessungs- und Risswesen Bergschäden. (Der Deutsche Steinkohlenbergbau: TechnischesSammelwerk vol. 2)1956. Essen. pp 452-508[8] EVOLUTIONARY OPERATION: A METHOD OF ENCREASING INDUSTRIALPRODUCTIVITYBox, G.E.P.Applied Statistics, 61957. pp 81-101[9] SIMULATION OF GENETIS SYSTEMS BY AUTOMATIC DIGITAL COMPUTESFraser, A.S.Australian Journalof Biological Sciences, 101957. pp 484-491[10] OBSERVATIONS OF SURFACE MOVEMENTS UNDER INFLUENCE OF MININGAND THE THEORETICAL INTERPRETATION.Knothe, S.Proc. European Congress on Ground Movement.1957. University of Leeds. pp 210-215[11] THE THEORIES AND MODEL RESEARCH OF MOVEMENTS OF GROUND MASSES.Litwiniszyn, J.Proc. European Congress on Ground Movement.1957. University of Leeds. pp 206-209[12] BAUEN IM BERGBAUGEBIETLuetkens, O.1957. Berlin: Springer189
[13] DISTORTION OF UNDERMINED SURFACE AND SHAFT PILLAR DIMENSIONING.Martos, F.Publs. Hung. Res. Inst. Min. no. 21958. pp 23-30[14] DIGITAL SIMULATION OF AN EVOLUTIONARY PROCESSFriedman, G.J.General Systems Yearbook, 41959. pp 171-184[15] AN ELASTIC ANALYSIS OF ROCK MOVEMENTS CAUSED BY MINING.Hackett, P.Trans. Instn Min. Engrs, 118, pt 71959. pp 421-435[16] A NEW APROACH TO THE ESTIMATION OF MINING SUBSIDENCE.Marr, J.E.Trans. Isntn Min. Engrs, 118, pt 111959. pp 692-707[17] THE PROBLEM OF ANALYSING AND INTERPRETING OBSERVED GROUNDMOVEMENT.Wardell, K.Colliery Engng, 361959. pp 529-538[18] AN ELASTIC TREATMENT OF GROUND MOVEMENT DUE TO MINING - I.Berry, D.S.J. Mech. Phys. Solids, 81960. pp 280-292[19] AN ELASTIC TREATMENT OF GROUND MOVEMENT DUE TO MINING - II.Berry, D.S.; Sales, T.W.J. Mech. Phys. Solids, 91961. pp 52-62[20] DIE VORAUSBERECHNUNG VON SENKUNG, SCHIEFLAGE UND KRÜMMUNGÜBER DEM ABBAU IN FLACHER LAGERUNGEhrhardt, W.; Sauer, A.Bergb.-Wiss, 81961. pp 415-428[21] PARTIAL EXTRACTION AS A MEANS OF REDUCING SUBSIDENCE DAMAGE.Inf. Bull. Prod. Dep. Natn. Coad Board, 61 2311961. 16 p[22] AN INTRODUCTORY MATHEMATICAL ANALYSIS OF THE MOVEMENTS ANDSTRESSES INDUCED BY MINING IN STRATIFIED ROCK.Salamon, M.D.G.Univ. Durham, King's Coll.Min, Res, Publ. 9. Bull. No. 3, Series: Strata Control/Res.1961. No. 16, 19p.[23] OPTIMIZATION TROUGH EVOLUTION AND RECOMBINATIONBremermann, H.J.Self-Organizing Systems. Spartan Books1962. Washington, USA[24] OUTLINE FOR A LOGICAL THEORY OF ADAPTIVE SYSTEMSHolland, J.H.JACM, 31962. pp 297-314190
[25] NEUERE VERFAHREN FUR DIE VORAUSBERECHNUNGEN VONBODENSENKUNGEN, VORNEHMILCH ÜBER ABBAUEN IN STEILER LAGERUNG.Niederhofer, G.Mitt. Markscheidew, 691962. pp 33-75[26] THE INFLUENCE OF STRATA MOVEMENT AND CONTROL ON MINIGDEVELOPMENT AND DESIGN.Salamon, M.D.G.Ph.D. thesis, University of Durham1962[27] LES AFFAISSEMENTS MINIERS DANS LE BASSIN DU NORD ET DUPAS-DE-CALAIS.Daunesse, C.; Rambaud, Y.Annls Mines1963. Paris. pp 595-633[28] ELASTIC ANALYSIS OF DISPLACEMENTS AND STRESSES INDUCE BY MINING OFSEAM OR REEF DEPOSITS - I: FUNDAMENTAL PRINCIPLES AND BASICSOLUTIONS DERVIED FROM IDEALIZED MODELS.Salamon, M.D.G.J. S. Afr. Inst. Min. Metall., 64, No. 41963. pp 128-149[29] SOME STUIDES IN MACHINE LEARNING USING THE GAME OF CHECKERSSamuel, A.L.Computers and Thoughts. McGraw-Hill1963. New York, USA[30] THE LIVING BRAINWalter, W.G.1963. New York, USA[31] ELASTIC ANALYSIS OF DISPLACEMENTS AND STRESSES INDUCE BY MINING OFSEAM OR REEF DEPOSITS - II: PRACTICAL METHOS OF DETERMININGDISPLACEMENT STRAIN AND STRESS COMPONENTS FROM A GIVEN MININGGEOMETRY.Salamon, M.D.G.J. S. Afr. Inst. Min. Metall., 64, No. 61964. pp 128-149[32] ELASTIC ANALYSIS OF DISPLACEMENTS AND STRESSES INDUCE BY MINING OFSEAM OR REEF DEPOSITS - III: AN APLICATION OF THE ELASTIC THEORY,PROTECTION OF SURFACE INSTALLATION BY UNDERGROUND PILLARS.Salamon, M.D.G.J. S. Afr. Inst. Min. Metall., 64, No. 101964. pp 469-500[33] ELASTIC ANALYSIS OF DISPLACEMENTS AND STRESSES INDUCE BY MINING OFSEAM OR REEF DEPOSITS - IV: INCLINED REEF.Salamon, M.D.G.J. S. Afr. Inst. Min. Metall., 65, No. 51964. pp 319-338[34] BESTIMMUNG DER ABSENKUNG DER TAGESOBERFLÄCHE BEI DERBEWEGUNG VON GESTEINEN IN FORM EINES RHEOLOGISCHEN FLIEßENS.Cernyi, G.I.Jvz. VUZ, Górny Zh. 91966. pp 3-9191
[35] ROCK MECHANICS APPLIED TO THE STUDY OF ROCKBURST.Cook, N.G.W. et alJ. S. AFr. Inst. Min. Metall., 661966. pp 435-528[36] LINEARE PROGRAMMIERUNG UND ERWEITERUNGENDantzig, G.B.1966. Berlin: Springer[37] ARTIFICIAL INTELLIGENCE TROUGH SIMULATED EVOLUTIONFogel, L.J.; Owens, A.J.; Wlash, M.J.1966. New York, USA[38] SUBSIDENCE ENGINEER'S HANDBOOK.N.C.B., Production Department1966. London.[39] COMPUTATION: FINITE AND INFINITE MACHINESMinsky, M.L.Prentice-Hall1967. Englewood Cliffs, NJ. USA[40] OPTIMALITY PRINCIPLES IN BILOGIERosen, R.1967. London[41] THE FINITE ELEMENT METHOD IN STRUCTURAL AND CONTINUUMMECHANICS.Zienkiewicz, O.C.; Cheung, Y.K.McGraw-Hill1967. Londres[42] PRECALCULATION OF GROUND MOVEMENTES CAUSED BY MINING.Hiramatsu, Y.; Oka, Y.Int. J. Rock Mech. Min. Sci., 51968. pp 399-414[43] CONTROLLED AND UNCONTROLLED COLLAPSE OF MINE PILLARS.Salamon, M.D.G.C.O.M. Res. Report, no. 48 68, Research Organisation1968. South Africa[44] ELASTIC MODULI OF STRATIFIED ROCK MASS.Salamon, M.D.G.Int. J. Rock Mech. Min. Sci, 51968. pp 519-527[45] HOW HIGH-SPEED COMPUTERS ADVANCE DESIGN OF PRACTICAL PILLARSYSTEMS.Starfield, A.M.; Fairhust, C.Engng Min. J., 1691968. pp 78-84[46] NEW CONCEPTS IN THE DESIGN OF PILLAR LAYOUTS.Salamon, M.D.G.; Deist, F.H.C.O.M. Res. Report, no. 25 70, Research Organisation1970. South Africa[47] STABILITY, INSTABILITY AND DESIGN OF PILLAR WORKINGS.Salamon, M.D.G.Int. J. Rock Mech. Min. Sci., 71970. pp 613-631192
[48] ROCK MECHANICS PROBLEMS ASSOCIATED WITH LONGWALL TRIALS INSOUTH AFRICA.Salamon, M.D.G; Oravecz, K.I.; Hardman D.R.5th Int. Strata Control Conference, pap no. 141972. London. 8p[49] STRATA CONTROL TECHNIQUES IN SHAFTS AND LARGE EXCAVATIONS.Wagner, H.; Salamon, M.D.G.Pap. Discuss. Ass. Miné Mgrs S. Afr.1972. pp 123-140[50] SOME CASE STUDIES OF MINE SUBSIDENCE AND ITS MATHEMATICALMODELLING. APPLICATION OF ORCK MECHANICS.Dahl, H.D; Choi, D.S.Proc. Symp. on Rock Mechanics, 15th1973. USA. pp 1-21[51] OPTIMIZATION TECHNIQUES WITH FORTRANKuester, J.L.; Mize, J.H.McGraw-Hill1973.[52] LOADING OF COAL PILLARS IN BOARD AN PILLAR WORKINGS.Oravecz K.I.Ph.D. thesis, University of Witwatersrand1973[53] EVOLUTIONSSTRATEGIE: OPTIMIERUNG TECHNISCHER SYSTEME NACHPRINZIPIEN DER BIOLIGUSCHEN EVOLUTIONRechenberg, I.Fromman-Holzboog1973. Stuttgart[54] ROCK MECHANICS OF UNDERGROUND EXCAVATIONS.Salamon M.D.G.Advances in Rock Mechanics, vol. 1, part BProc. 3rd Congress Int. Soc. for Rock Mec.1974. Denver[55] BESTIMMUNG DER VERTIKALEN VERFORMUNGEN DER SCHACHTRÖHREBEIM ABBAU VON KOHLENFLÖZENSzpetkowski, S.Geodezja i Kartografia, 231974. Polonía. pp 125-140[56] ADAPTATION IN NATURAL AND ARTIFICIAL SYSTEMS.Holland, J.H.The University of Michigan Press1975. Ann Arbor. USA[57] DIE FERNWIRKUNG EINES ABBAUELEMENTES BEI ELASTOPLASTISCHEMGEBIRGE.Neuhaus, W.Glückauf-Forsch, 361975. pp 199-205[58] DIR BERECHNUNGSGRUNDLAGEN DER BERGSCHADENKUNDLICHENEINWIRKUNGSNETZE UND IRHE MÖGLICHKEITEN UND GRENZENNeuhaus, W.Mitt. Markscheidew, 831976. pp 41-60193
[59] NUMERISCHE OPTIMIERUNG VON COMPUTERMODELLEN MITTELS DEREVOLUTIONSSTRATEGIESchwefel, H.P.Basel, Birkhaeuser.1977[60] COGNITIVE SYSTEMS BASED ON ADAPTIVE ALGORITHMSHolland, J.H.; Reitman, J.S.Pattern-directed inference systems. Academics Press1978. NY. USA[61] THE ROLE OF LINEAR MODELS IN THE ESTIMATION OF SURFACE GROUNDMOVEMENTS INDUCED BY MINIG TUBULAR DEPOSITS.Salamon M.D.G.Large Ground Movements and Structures, Geddes J.D. ed.1978. London, 187-208[62] MINING SUBSIDENCE: HISTORICAL REVIEW AND STATE OF THE ART.Shadbolt, C.H.Proc., Conf. on Large Ground Movements and Structures.1978. Cardiff, Wales. pp 705-748[63] TEORIA S. KNOTHEGO W UJECIU CZASOPRZESTRZENNYM.Sroka, A.Polska Akademia Nauk, Geodezja, 241978. Kraków.[64] NUMERICAL OPTIMIZATION OF COMPUTER MODELSSchwefel, H.P.Chicheste: Wiley1981[65] INTELLIGENT BEHAVIOR AS AN ADAPTION TO THE TASK ENVIROMENTBooker, L.B.PdD Dissertation, Univ. Of Michigan, Logic Computers Group1982. Ann Arbor. USA[66] MINING SUBSIDENCE ENGINEERING.Kratzsch, H.Springer-Verlag1982. Berlin[67] COMPLEMENTARY INFLUENCE FUNCTIONS FOR PREDICTING SUBSIDENCECAUSED BY MINING.Sutherland, H.J.; Munson, D.E.Proc. 23rd U.S. Symposium on Rock Mechanics,1982. USA. pp 1115-1121[68] ASSESSMENT OF SUBSIDENCE DATA FROM THE NORTHERN APPALACHIANBASIN FOR SUBSIDENCE PREDICTION.Tandanand, S.; Powell, L.R.USBM Rep. R1 8630. US Bureau of Mines1982[69] CORRELATION AND ANALYSIS OF SUBSIDENCE DATA.Brunner, D.J. et alDepartment of Materials Science and Mineral Engineering. University of California1983. Berkeley, USA[70] DESIGN CONSIDERATIONS FOR LAYOUTS OF STOPES IN TABULAR DEPOSITS.More O'Ferall R. C.Roch Mechanics in Mining Practice, Budavari S. ed1983. Johannesburg. pp 133-149194
[71] LINEAR MODELS FOR PREDICTING SURFACE SUBSIDENCE.Salamon, M.D.G.Proc. 5th Int. Cong. on Rock Mechanics.1983. Melbourne. pp 107-114.[72] PRINCIPLES OF THE SUPPORT OF TABULAR EXCAVATIONS.Wagner, H.Roch Mechanics in Mining Practice, Budavari S. ed1983. Johannesburg. pp 151-171[73] PROPOSED CRITERIA FOR SUBSIDENCE DAMAGE TO BUILDINGS.Bhattacharya, S.; Singh, M. M.Proc. 25th U.S. Symposium on Rock Mechanics,1984. NY, USA. pp 747-755.[74] RECENT DEVELOPMENTS IN SUBSIDENCE PREDICTION AND CONTROL FORTHE EASTERN U.S. COALFIELDS.Karmis, M.; Triplett, T.; Schilizzi, P.Proc. 25th U.S. Symposium on Rock Mechanics.1984. NY, USA. pp 713-721.[75] GROUND MOVEMENT CHARACTERISTICS ABOVE MINED PANELS INAPPALACHIA - AND EMPIRICAL APROACH.Karmis, M.; Triplett, T.; Schilizzi, P.; Hassenfus, G.Proc. Int. Conf. on Case Histories in Geotech. Eng.1984. USA. pp 1221-1227[76] GEOMETRY OF SUBSIDENCE ASSOCIATED WITH LONGWALL MINING.GROUND MOVEMENTS AND STRUCTURES.Tsur Lavie, Y.; Denekamp, S.A.Proc. Int. Conf., 3rd1984. Wales. pp 325-337[77] PRECALCULATION OF SUBSIDENCE OVER LONGWALL PANEL IN NORTHERNAPPALACHIAN COAL REGION.Adamek, V.; Jeran P.W.Inf. Circ. U.S. Bur. Mines1985. pp 34-52[78] COMPUTER MODELLING OF THE SURFACE EFFECTS OF SUBSIDENCECONTROL METHODS.Heasley, K.A.; Saperstein, L.W.Proc. U.S. Symp. On Rock Mechanics, 26th1985. USA. pp 189-196[79] SUBSIDENCE OVER ROOM AND PILLAR MINE IN APPALACHIAN COALPROVINCE AND THE USE OF SUBSIDENCE PREDICTIVE METHODS.Jones, T.Z.; Kohli, K.K.Proc. U.S. Symp. on Rock Mechanics, 26th1985. USA. pp 179-187[80] NUMERICAL MODELLING OF THE BEHAVIOUR OF OVERBURDEN ROCK MASSASSOCIATED WITH LONGWALL MINING.Siriwardane, H.J.Proc. U.S. Symp. on Rock Mechanics, 26th1985. USA. pp 171-177.[81] SUBSIDENCE PREDICTION FOR SASKATCHEWAN POTASH MINES.Steed, C.; Bawden, W.F.; Coode, A.M.; Mottahed, P.Proc. U.S. Symp. on Rock Mechanics, 26th1985. USA. pp 163-170195
[82] PRECALCULATION OF SURFACE SUBSIDENCE DUE TO COAL MINING.Sugawara, K.; Obara, Y.; Okamura, H.; Wang, Y.Proc. Int. Conf. on Numerical Methods in Geomechanics, 5th1985. Nagoya. pp 1603-1610[83] KNOWLEDGE GROWTH IN AN ARTIFICIAL ANIMALWilson, S.W.Proc. 1st Int. Conf. On Genetic Algorithms1985. pp 16-23[84] ESCAPING BRITTLENESS: THE POSSIBILITIES OF GENERAL-PURPOSELEARNING ALGORITHMS APPLIED TO PARALLEL RULE-BASED SYSTEMSHolland, J.H.Machine Learning: An Artificial Intelligence approach, Vol II1986. Los Altos, CA. USA. pp 593-623[85] INDUCTION: PROCESSES OF INFERENCE, LEARNING AND DISCOVERYHolland, J.H.; et alMIT Press1986. USA[86] HUNDIMIENTOS MINEROS. MÉTODOS DE CÁLCULO.Ramirez Oyanguren, P.; Rambaud Pérez, C. et al.Instituto Tecnológico Geominero de España.1986. Madrid, ESPAÑA.[87] THREE DIMENSIONAL NUMERICAL MODELLING OF SURFACE SUBSIDENCEINDUCED BY UNDERGROUND MINING.McNabb, K.B.Tech. Rep. 146, Div. Geomechanics CSIRO1987. Australia. 20 pp[88] MINING SUBSIDENCE AND DISPLACEMENT PREDICTION USING INFLUENCEFUNCTION METHODS.Ren, G.; Reddish, D.J.; Whittaker, B.N.Min. Sci. Technol., 51987. pp 89-104[89] ZUM PROBLEM DER BERECHNUNG DYNAMISCHER, BERGMANNISCHBEDINGTER SENKUNGENSchober, F.; Sroka, T.; Sroka, A.Das Markscheidewesen, 94 Nr 41987. pp 416-424[90] COLLECTIVE PHAENOMENA IN EVOLUTIONARY SYSTEMSSchwefel, H.P.31st Annual Meet. International Soc. for General System Research1987. Budapest. pp 1025-1033[91] PREDICTION OF SUBSIDENCE USING COMPLEMENTARY INFLUENCEFUNCTIONS.Sutherland, H.J.; Munson, D.E.Int. J. Rock Mech. Min. Sci. Geomech. Abstr., 211987. pp 195-202[92] NUMERICAL MODELLING OF SUBSIDENCE INDUCED BY UNDERGROUND COALMINING.Coulthard, M.A.; Dutton, A.J.Key Questions in Rock Mechanics, Proc. U.S. Symp. on Rock Mechanics, 29th1988. USA. pp 529-536196
[93] SIZING POPULATIONS FOR SERIAL AND PARALLEL GENETIC ALGORITHMSGoldberg, D.E.TCGA Report No 88005. University of Alabama1988. USA[94] METHODS OF ASSESSING EFFECTS OF LONGWALL MINIG ON SURFACESUBSIDENCE.Hazen, G.A; Sargand, S.M.Mining Engineering, 61988. pp 451-454[95] THE INFLUENCE OF FAULTING ON GROUND MOVEMENT DUE TO COALMINING. THE U.K. AND EUROPEAN EXPERIENCE.Hellewell, E.G.Min. En., 1471988. London. pp 334-337[96] DEVELOPMENTS IN ROCK MECHANICS: A PERSPECTIVE OF 25 YEARS.Salamon, M.D.G.Trans. Instn Min. Metall. (Sect. A: Min. industry), v 97.1988. London, U.K. A57-68.[97] SUBSIDENCE PREDICTION RESULTING FROM UNDERGROUND MINIG - ANUMERICAL MODELLING TECHNIQUE.Shankar, K.V.; Dhar, B.B.Proc. Indian Geotech. Conf., Vol. 11988. Allahabad. pp 451-454[98] MODELLING OF SUBSIDENCE CAUSED BY LONGWALL MINIG USING FINITEELEMENT AND DISPLACEMENT DISCONTINUITY METHODS.Siriwardane, H.J.Proc. Int. Conf. on Numerical Methods in Geomechanics, 8th1988. Innsbruck. pp 1901-1910[99] PREDICTION OF SURFACE MOVEMENT WITH EMPHASIS ON HORIZONTALDEFORMATION DUE TO MINING.Bai, M; Elsworth, D; Saperstein, L.W.Symposium on Rock Mechanics: Rock Mechanics as a Guide for Efficient Utilization of NaturalResources.1989. U.S. pp 731-738[100] DEVELOPMENT OF A MECHANISTIC MODEL FOR PREDICTION OF MAXIMUNSUBSIDENCE AND SUBSIDENCE PROFILE DUE TO LONGWALL MINING.Begley, R.D; Khair, A.W.Symposium on Rock Mechanics: Rock Mechanics as a Guide for Efficient Utilization of NaturalResources.1989. U.S. pp 495-502[101] GENETIC ALGORITHMS IN SEARCH OPTIMIZATION AND MACHINE LEARNINGGoldberg, D.E.Addison-Wesley1989. USA[102] FINITE ELEMENT ANALYSES OF THE MOESTAKE MINE STUDY SLOPE: ANUPDATE.Pariseau, W.G.; Duan F.Proc. 3rd Int. Conf. on Numerical Model in Geomech.1989. NY, USA. pp 566-576197
[103] SUBSIDENCE PREDICTION USING A LAMINATED LINEAR MODEL.Salamon, M.D.G.Symposium on Rock Mechanics: Rock Mechanics as a Guide for Efficient Utilization of NaturalResources.1989. U.S. pp 503-510.[104] UNIFORM CROSSOVER IN GENETIC ALGORITHMSSyswerda, G.Proc. 3rd Int. Conf. On Genetic Algorithms1989[105] SUBSIDENCE OCCURRENCE PREDICTION AND CONTROL.Whittaker, B.N.; Reddish, D.J.Elsevier. Developments in Geotechnical Engineering, Vol. 561989. Amsterdam[106] ARTIFICIALLY ADAPTIVE AGENTS IN ECONOMIC THEORYHolland, J.H.; Miller, J.American Economic Review: Proc. 103rd Annual Meeting of Americam Economics Association1990. pp 365-370[107] SUBSIDENCE DEVELOPMENT WITH TIME - EXPERIENCES FROM LONGWALLOPERATIONS IN THE APPALACHIAN COALFIELDJarosz, A.; Karmis, M.; Sroka, A.Int. J. Mining and Geological Engineering, 81990. USA. pp 261-273[108] SUBSIDENCE PREDICTIONS TECHNIQUES IN U.S.A.: STATE OF THE ARTREVIEW.Karmis, M.; Agioutantis,Z.; Jarosz A.Min. Res. End., v. 3, No. 3, pp 197-2101990. USA[109] ON THE ROLES OF MALESAtmar, J.W.Animal Behavior, Vol.411991. pp 195-205[110] AUTOCAD R11/R12 REFERENCE MANUAL.Autodesk AG.1991. USA[111] NEW THREE DIMENSIONAL FINITE DIFFERENCE MODEL OF GROUND WATERFLOW AND LAND SUBSIDENCE IN THE HUSTON AREA.Bravo, R. Rogers, J.R; Cleveland, T.G.Proc. Int. Symp. On Land Subsidence, 4th1991. Houston. pp 15-26[112] NONLINEAR MOBELLING OF GROUNDWATER FLOW AND TOTAL SUBSIDENCEOF THE MEXICO CITY AQUIFER-AQUITARD SYSTEM.Rivera, A.; Ledoux, E.; de Marsily, G.Proc. Int. Symp. On Land Subsidence, 4th1991. Houston. pp 45-58[113] A CRITICAL REVIEW OF MINE SUBSIDENCE PREDICTION METHODS.Srivastava, A.M.C.; Bahuguna, P.P.Min. Sci. & Technol., v. 13, No. 3, pp 369-382.1991. Saxena, N.C., USA198
[114] INFLUENCE OF OVERBURDEN MASS BEHAVIOURAL PROPERTIES ONSUBSIDENCE LIMIT CHARACTERISTICS.Yao, X.L.; Whittaker, B.N.; Reddish, D.J.Mining Science And Technology, 131991. pp 167-173[115] A STRUCTURED DISTRIBUTED ALGRITHM FOR FUNCTION OPTIMIZATIONVoigt, H.M.; Born, J.4th Int. Conf. on Genetic Algorithms1991. San Diego. USA[116] AUTOCAD R12 ADS PROGRAMMER'S REFERENCE MANUAL.Autodesk AG.1992. USA[117] EFECTOS DE LA SUBSIDENCIA SOBRE LAS CONSTRUCCIONES EN SUPERFICIE.González Nicieza, C.; Toraño Alvarez, J.; Bello García, A.; Fernández Fernández, V.Anales de Ingeniería Mecánica. Año 9, nº5, pp 201-205.1992. Madrid[118] DEVELOPMENT OF VOID DIFFUSION MODELS TO PREDICT SUBSIDENCE DUETO UNDERGROUND COAL MININGHao, Q.; Chugh, Y.P.Proc. 11th Int. Conf. on Ground Control in Mining. University of Wollongong, N.S.W.1992. Australia. pp 517-525[119] ADAPTATION IN NATURAL AND ARTIFICIAL SYSTEMSHolland, J.HMIT Press1992. USA[120] EFFECTS OF SUBSIDENCE ON STEEP TOPOGRAPHY AND CLIFF LINESKay, D.; Carter, J.P.Proc. 11th Int. Conf. on Ground Control in Mining. University of Wollongong, N.S.W.1992. Australia. pp 483-490[121] EVOLUTION STRATEGIES FOR VECTOR OPTIMIZATIONKursawe, F.National Chiao Tung University1992. Taipei. pp 187-193[122] A COMPREHENSIVE COMPUTER MODEL FOR PREDICTING DYNAMICSUBSIDENCE FOR LOGNWALL OPERATIONSLuo, Y.; Peng, S.S.Proc. 11th Int. Conf. on Ground Control in Mining. University of Wollongong, N.S.W.1992. Australia. pp 511-516[123] SEAM ELEMENT: PREDICTION OF SUBSIDENCE DUE TO COAL MINING.Salamon, M.D.G.; Yang, G.Proc. 3rd Workshop on Surface Subsidence Due to Underground Mining1992. USA. pp 47-55[124] INFLUENCE OF THE SLOPING OF GROUND SURFACES ON MINE SUBSIDENCEShu, D.M.; Bhattacharyya, A.K.Proc. 11th Int. Conf. on Ground Control in Mining. University of Wollongong, N.S.W.1992. Australia. pp 475-482[125] AN OVERVIEW OF GENETIC ALGORITHMS: FUNDAMENTALS AND RESEARCHTOPICSBeasley, D.; Bull, D.R.; Marin, R.R.University Computing, 15 (2-4). UCISA1993. UK199
[126] ASPECTOS GRÁFICOS DE LA PREDICCIÓN DE LA SUBSIDENCIA MINERABello García, A.; Morís M., G.; Menéndez Díaz, A.; González Nicieza, C, Rodríguez Díaz, M.A.VI Congreso Internacional de Expresión Gráfica en la Ingeniería, Vol 2, pp 9-181993. Asturias[127] FUZZY INFLUENCE FUNCTION METHOD FOR CALCULATING MINESUBSIDENCE IN A HORIZONTAL SEAM.Liao, C.P.Geotechnical and Geological Engineering; 11(4)1993. pp 235-247[128] SURFACE SUBSIDENCE PREDICTION BY NONLINEAR FINITE ELEMENTANALYSIS.Najjar, Y.; Zaman, M.J. of Geotech. Engineering, Vol. 119, No. 111993. pp 1790-1804[129] A NUMERICAL APPROACH TO SUBSIDENCE PREDICTION AND STRESSANALYSIS IN COAL MINING USING A LAMINATED MODEL.Yang, C.; Chugh, Y.P.; Yu, Z.; Salamon, M.D.G.Int. J. Rock Mech. Min. Sci. and Geomech. Abstr., Vol 30, No. 71993. Great Britain. pp 1419-1422[130] A GENETIC ALGORITHM TUTORIALWhitley, D.Computer Science Department, Colorado State University1993. USA[131] NON-LINEAR FINITE ELEMENT ANALYSIS OF SURFACE SUBSIDENCE ARISINGFROM INCLINED SEAM EXTRACTION.Yao, X.L.; Reddish, D.J.; Whittaker, B.N.Int. J. Rock Mech. Min. Sci. and Geomech. Abstr., Vol 30, No. 41993. Great Britain. pp 431-441[132] CARATERIZACIÓN GRÁFICA DE LAS ZONAS DE RIESGO PRODUCIDAS POR ELFENÓMENO DE SUBSIDENCIA MINERABello, A.; Rusev, P.VI Congreso Internacional de Expresión Gráfica en la Ingeniería, Vol 2, pp 217-2271994. Toledo.[133] PREDICCIÓN DE LA SUBSIDENCIA MINERABello García, A.; González Nicieza, C.; Ordieres Meré, J.B.; Ariznavarreta Fernández, F.XI Congreso Nacional de Ingeniería Mecánica1994. Valencia[134] EL PROGRAMA ITGESUB COMO APLICACIÓN A LOS ESTUDIOS DESUBSIDENCIA MINERAGómez de las Heras, J.; Ochoa Bretón, A.; González Nicieza, C.; Bello García, A.IX Congreso Internacional de Minería y Metalurgia, pp 435-4501994. León[135] THE HITCHHIKER’S GUIDE TO EVOLUTIONARY COMPUTATION: A LIST OFFREQUENTLY ASKED QUESTIONSHeitkoetter, J.; Beasley, D.USENET: comp.ai.genetics1994.[136] EVOLUTION STRATEGIES: SIMPLE MODELS OF NATURAL PROCESSESKursawe, F.Revue Internationale de Systemique1994. France200