3.1 Sistemas de Lienard
3.1 Sistemas de Lienard
3.1 Sistemas de Lienard
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>3.1</strong>. SISTEMAS DE LIENARD 1<strong>3.1</strong> <strong>Sistemas</strong> <strong>de</strong> <strong>Lienard</strong>Los sistemas <strong>de</strong> <strong>Lienard</strong> respon<strong>de</strong>n a la ecuación diferencialẍ + f(x)ẋ + g(x) =0 (<strong>3.1</strong>)que es una generalización <strong>de</strong> la ecuación diferencial que rige el comportamiento <strong>de</strong> un sistemamecánico <strong>de</strong> segundo or<strong>de</strong>n con fricción f(·) yfuerzasg(·) <strong>de</strong>bidas a funciones potenciales, bajosuposiciones a<strong>de</strong>cuadas sobre f(·) y g(·).Efectuando el cambio <strong>de</strong> variables x 1 = x, x 2 = ẋ + F (x), don<strong>de</strong> f(x) = F 0 (x) la ecuacióndiferencial (<strong>3.1</strong>) se pue<strong>de</strong> escribir como el sistema planarẋ 1 = x 2 − F (x 1 ),ẋ 2 = −g(x 1 ).(3.2)<strong>Lienard</strong> estableció en 1928 que, bajo ciertas condiciones sobre F (·) y g(·), la ecuación diferencial(<strong>3.1</strong>) o el sistema planar (3.2) sólo pue<strong>de</strong>n tener un único ciclo límite.En la prueba <strong>de</strong> éste y otros resultados <strong>de</strong> interés será útil <strong>de</strong>finir las funcionesy la función energíaF (x) =Z xf(σ)dσ, G(x) =Z x00g(σ)dσ,V (x 1 ,x 2 )= 1 2 x2 2 + G(x 1 ). (3.3)Abusando ligeramente <strong>de</strong> la notación, se indicará indistintamente V (x) o V (x 1 ,x 2 ) según convenga.Teorema 1 (<strong>Lienard</strong>). Bajolashipótesis(i) F y g son funciones reales continuas i.e. F, g ∈ C 1 (R);(ii) F y g son impares: F (x) =−F (−x); g(x) =−g(−x), lo que implica que F (0) = g(0) = 0;(iii) xg(x) > 0 para x 6= 0, i.e. g(·) está contenida en el primer y tercer cuadrante;(iv) F 0 (0) < 0;(v) F tiene ceros sólo en x =0,yenx = ±a, a ∈ R;(vi) F tien<strong>de</strong> monótonamente a infinito para x ≥ a, cuando x →∞;el sistema <strong>de</strong> <strong>Lienard</strong> (3.2) tiene un único ciclo límite y es estable. 2Bajo las hipótesis <strong>de</strong>l teorema, el sistema posee las siguientes propieda<strong>de</strong>s:• El origen es el único punto <strong>de</strong> equilibrio <strong>de</strong> (3.2).• La curvas <strong>de</strong> pendiente nula (nullclinas) están dadas porẋ 1 = 0 ⇒ x 2 = F (x 1 ),ẋ 2 = 0 ⇒ g(x 1 )=0 ⇒ x 1 =0.Sobre x 1 =0(el eje x 2 ),elflujo tiene dirección horizontal y hacia la <strong>de</strong>recha si x 2 > 0, ycambia <strong>de</strong> sentido para x 2 < 0. Sobre la curva x 2 = F (x 1 ) el flujo tiene dirección vertical (yaque sobre ella ẋ 1 =0)y orientada hacia abajo si x 1 > 0, y hacia arriba si x 1 < 0.• El sistema (3.2) es invariante bajo el cambio <strong>de</strong> coor<strong>de</strong>nadas (x 1 ,x 2 ) → (−x 1 , −x 2 ). Por lotanto, si [x 1 (t),x 2 (t)] es una solución <strong>de</strong> (3.2), también lo es [−x 1 (t), −x 2 (t)]. En consecuencia,si Γ es una trayectoria cerrada <strong>de</strong>l sistema, es simétrica respecto al origen.
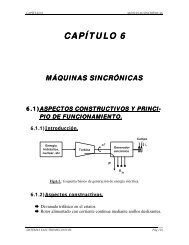
4Fig. 3.2: Ciclolímiteparaelsistema(3.7)conα =1/10.En 1958 el matemático chino Z. Zhang probó el siguiente teorema que complementa al <strong>de</strong> <strong>Lienard</strong>.Teorema 2 (Zhang) Bajo las hipótesis(i) a−1, y no es constante en un entorno <strong>de</strong>l origen. Enconsecuencia, el teorema <strong>de</strong> Zhang permite asegurar que el sistema tiene a lo sumo un único ciclo límiteestable (Fig. 3.2). 2En 1981 Zhang probó otro interesante teorema relacionado al número <strong>de</strong> ciclos que pue<strong>de</strong> exhibirel sistema <strong>de</strong> <strong>Lienard</strong> (3.2).
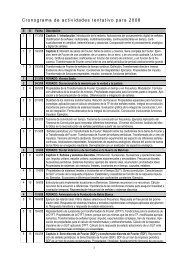
<strong>3.1</strong>. SISTEMAS DE LIENARD 5Fig. 3.3: Función f(x) (a) y los dos ciclos límite <strong>de</strong>l sistema (3.8) (b).Teorema 3 (Zhang) Bajo las hipótesis(i) g(x) =x;(ii) F ∈ C 1 (R);(iii) f(x) =F 0 (x) es una función par con exactamente dos ceros positivos a 1 0 y F (a 2 ) < 0;(v) f(x) es monótonamente creciente para x>a,el sistema (3.2) tiene a lo sumo dos ciclos límite. 2Ejemplo 3.3 Sistema con dos ciclosEn el sistema cuadráticoẋ 1 = x 2 − ( 825 x5 1 − 4 3 x3 1 + 4 x 5 1),(3.8)ẋ 2 = −x 1 ,es F (x) = 825 x5 − 4 3 x3 + 4 x yentonces,f(x) =F 0 5(x) = 8 5 x4 − 4x 2 + 4 5. La Fig. 3.3(a) muestra que lap √ p √función f(x) es par; sus raíces positivas son a 1 = 1 2 5 − 17 ' 0.47, a2 = 1 2 5+ 17 ' 1.51, yseverifica que F (a 1 ) ' 0.245,F(a 2 ) ' −0.87. En consecuencia se satisfacen todas las hipótesis <strong>de</strong>l teorema,y el sistema tiene a lo sumo dos ciclos límite. En realidad, el sistema posee exactamente dos ciclos (cf.Teorema 6) como se muestra en la Fig. 3.3(b). 2Por supuesto, cuanto mayores sean requisitos impuestos sobre las funciones F (x) y g(x) tanto másespecífico se pue<strong>de</strong> ser respecto al número <strong>de</strong> ciclos que tenga el sistema (3.2). Por ejemplo, sig(x) =x y F (x) es un polinomio, se tiene los siguientes resultados:Teorema 4 (Lins, <strong>de</strong> Melo y Pugh): El sistema (3.2) con g(x) =x y F (x) =a 1 x+a 2 x 2 +a 3 x 3con a 1 a 3 < 0 tiene exactamente un ciclo límite, que es estable si a 1 < 0 einestablesia 1 > 0. 2El matemático ruso Rychkov mostró que el sistema <strong>de</strong> <strong>Lienard</strong> (3.2) con g(x) =x y F (x) =a 1 x + a 3 x 3 + a 5 x 5 tiene a lo sumo dos ciclos límites.Si un sistema no lineal en un punto <strong>de</strong> equilibrio se comporta como un foco múltiple, <strong>de</strong> multiplicidadm, pue<strong>de</strong>n bifurcarse <strong>de</strong>s<strong>de</strong> él hasta m ciclos límite, que se <strong>de</strong>nominan ciclos límitelocales.Teorema 5 (Blows y Lloyd): El sistema (3.2) con g(x) =x y F (x) =a 1 x + a 2 x 2 + ··· +a 2m+1 x 2m+1 tiene a lo sumo m ciclos límite locales, y existen coeficientes con a 1 ,a 3 ,a 5 , ...,a 2m+1 alternando en signo tal que (3.2) tiene m ciclos límite locales. 2
8El origen es un punto <strong>de</strong> equilibrio, y existen infinitos ciclos límites Γ n formados por los círculos <strong>de</strong> radior =1/(nπ). Estos ciclos límites se acumulan en el origen; cada uno <strong>de</strong> los ciclos Γ 2n es estable mientrasque los Γ 2n+1 son inestables. 2El teorema <strong>de</strong> Dulac asegura que H n (a, b) < ∞. El número <strong>de</strong> Hilbert H n se <strong>de</strong>fine comoH n =sup H n (a, b).(a,b)∈R (n+1)(n+2)Los sistemas lineales no tienen ciclos límites en R 2 <strong>de</strong> don<strong>de</strong> resulta que H 1 =0. En cambio, parael caso más simple <strong>de</strong> sistemas no lineales, los sistemas planares cuadráticos [(<strong>3.1</strong>2) con n =2],no se ha podido <strong>de</strong>terminar el número <strong>de</strong> Hilbert H 2 . En 1952, el matemático ruso N. V. Buatinprobó que cualquier sistema planar cuadrático tiene a lo sumo 3 ciclos límites locales. Durantecierto tiempo se creyó que H 2 =3;sin embargo, en 1979 los matemáticos chinos S. L. Shi, L. S.ChenyM.S.Wangprodujeronejemplos<strong>de</strong>sistemas planares cuadráticos con 4 ciclos límites. Porlo tanto, H 2 ≥ 4. Basado en la evi<strong>de</strong>ncia disponible hasta el momento, se cree que H 2 =4. En1984 Y. X. Chin aseguró haber probado este resultado; sin embargo, una serie <strong>de</strong> errores fueronencontrados en este trabajo por Y. L. Cao.Respecto <strong>de</strong> H 3 , se sabe que un sistema planar cúbico pue<strong>de</strong> tener al menos 11 ciclos límite(Zola<strong>de</strong>k, 1995). En 1986 J. B. Li y Q. Huang hallaron un sistema planar cúbico con once cicloslímite. Hasta este momento, todo lo que pue<strong>de</strong> <strong>de</strong>cirse es que H 3 ≥ 11. El Problema 16 <strong>de</strong> Hilbertpara sistemas planares ha <strong>de</strong>spertado mucho interés en los últimos años, y probablemente continúehaciéndolo por algún tiempo más.3.2.1 ReferenciasN. Bautin, On the number of limit cycles which appear with a variation of coefficients from anequilibrium position of a focus or center type, Mat. Sb., 30, 1952, pp. 181-196. A.M.S. TranslationNo. 100, 1954, pp. 3-19.T. Blows, N. Lloyd, The number of small amplitu<strong>de</strong> limit cycles of <strong>Lienard</strong> equations, Math. Proc.Cambridge Phil. Soc., 95, 1984, pp. 751-758.H. Dulac, Sur les cycles limites, Bull.Soc.Math.France, 51, 1923, pp. 45-188.H. K. Khalil, Nonlinear Systems, 3ra ed., Prentice-Hall, New Jersey, 2002.J. Li, Q. Huang, Bifucation of limit cycles forming compound eyes in the cubic system. ChineseAnn. Math, 8B(4), 1987, pp. 391-403.A. Lins, W. <strong>de</strong> Melo, C. Pugh, On <strong>Lienard</strong>’s equation, Lecture Notes in Mathematics, 597,Springer-Verlag, 1977, pp. 335-357.L. Perko, Differential Equations and Dynamical Systems, 2da. Ed., Texts in Applied Mathematics7, Springer-Verlag, New York, 1996.Shi Songling, A concrete example of the existence of four limit cycles for plane quadratic systems,Sci. Sinica, 23, 1980, pp. 153-158.Zhang Ziefen, On the uniqueness of limits cicles of certain equations of nonlinear oscillations, Dokl.Akad. Nauk. SSSR, 19, 1958, pp. 659-662.Zhang Ziefen, On the existence of exactly two limit cycles for the <strong>Lienard</strong> equation, Acta Math.Sinica, 24, 1981, pp. 710-716.H. Zola<strong>de</strong>k, Eleven small limit cycles in a cubic vector field, Nonlinearity, 8, 1995, pp. 843-860.