5.18. Ejercicios
5.18. Ejercicios
5.18. Ejercicios

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>5.18.</strong> <strong>Ejercicios</strong> 147<strong>5.18.</strong> <strong>Ejercicios</strong>Ejercicio 1. Para la señal analógica x a (t) = 3 sen(100πt),1. Dibuje la señal x a (t) para 0 ≤ t ≤ 30 ms.2. Determine la frecuencia de la señal discreta x [n] que resulta de muestrear x a (t) conuna frecuencia de muestreo F s =300 muestras/segundo, y muestre que es periódica.¿Cuál es el período en muestras? ¿Cuál es el período de la señal discreta enmilisegundos?3. Calcule los valores de las muestras de un período de x[n]. Dibuje x[n] en un mismodiagrama junto con x a (t).4. ¿Puede encontrar una frecuencia de muestreo F s tal que alguna de las muestras dela señal x[n] alcance el valor pico de x a (t)? ¿Cuál es la mínima F s apropiada paraeste fin?Ejercicio 2. Una señal analógica contiene frecuencias de hasta 10 kHz.1. ¿Qué rango de frecuencias de muestreo permitirán una reconstrucción exacta deesta señal a partir de las muestras?2. Si la señal se muestrea a F s = 8 kHz, ¿cuál es la frecuencia ω 1 (discreta) asociada alas componentes de frecuencia (analógica) f 1 = 5 kHz?3. Repita el inciso anterior para las componentes de frecuencia f 2 = 9 kHz.Ejercicio 3. La señal analógica x a (t) = sen (2π f 0 t) , −∞ < t < ∞ se muestrea cadaT = 1/F s segundos, donde F s es la frecuencia de muestreo. La señal muestreada es x[n] =x a (nT) = sen (2π f 0 Tn) = sen [2π ( f 0 /F s ) n] , −∞ < n < ∞.1. Grafique la señal x[n], 0 ≤ n ≤ 30 para F s = 5 kHz y f 0 = 0,5, 2, 3, y 4,5 kHz.2. Dibuje (a mano alzada) el espectro en frecuencia de la señal analógica y el de laseñal muestreada en cada uno de los casos.3. Repita los incisos 1 y 2 para la señal analógica x a (t) = cos (2π f 0 t) .4. Explique las similitudes y las diferencias entre las diferentes gráficas de las señalesmuestreadas de los incisos 1 y 3, ayudándose con los espectros de las señales correspondientes.Ejercicio 4. Una señal analógica x a (t) = sen(480πt) + 3 sen(720πt) se muestrea a razónde 600 veces por segundo (F s = 600 Hz).1. ¿La frecuencia de muestreo cumple con el Teorema de Nyquist? Si la respuesta esnegativa, determine la frecuencia de muestreo apropiada para la señal.2. ¿A qué frecuencias aparecen las réplicas del espectro de la señal “mal muestreada”?Procesamiento Digital de Señales U.N.S. 2011
148 5. Muestreo de señales3. ¿Cuáles son las frecuencias ω i de la señal discreta x[n] que resulta del muestreo?4. Si la señal x[n] se convierte en una señal continua utilizando un conversor D/Aideal, escriba explícitamente la expresión de la señal reconstruida y a (t).Ejercicio 5. La señal de tiempo continuo x(t) = 10 sen(2πt) + 10 sen(8πt) + 5 sen(12πt)se muestrea a una frecuencia f s = 5 Hz. Encuentre una señal x a (t) tal que sus muestrascoincidan con las de x(t) –es decir, x(n/ f s ) = x a (n/ f s )– pero cuyo contenido espectralsea nulo para | f | > f s /2.IEjercicio 6. La señal x (t) = e −0,02t2 sinc(t) se muestrea cada T segundos. Se encuentraque la transformada de Fourier X e jω de la señal muestreada x[n] = x (t)| t=nTverificaX e jω = 1. ¿Cuál es el mínimo valor de T para el cual es posible tal resultado?. Si estoes imposible para cualquier T, explique porqué.IEjercicio 7. Se conoce que una señal x (t) es de la forma x (t) = cos (2π f 0 t + φ 0) , conφ 0= π/4. Pedro muestrea la señal con F s1 = 150 Hz, y encuentra que f 0 = 50 Hz. Pablomuestrea la misma señal, pero con F s2 = 240 Hz, y encuentra que f 0 = 20 Hz.1. ¿Es posible determinar el verdadero valor de la frecuencia f 0 en base a esta información?Si no es posible, ¿cuáles son todos los posibles valores de f 0 ?2. Si se sabe que f 0 < 1000 Hz, ¿es posible determinar el verdadero valor de f 0 ?Ejercicio 8. Un sistema lineal e invariante en el tiempo tiene la función transferenciaH e jω = e −j(α/2)ω , |ω| < π. Determine, justificando su respuesta, si el sistema es causalo no cuando (a) α es par, y (b) α es impar.Ejercicio 9. En el sistema de procesamiento digital que se muestra en la figura, el períodode muestreo del conversor C/D es de ˜T = 5 ms y el del conversor D/C es T = 1 ms,respectivamente. La entrada es x(t) = 3 cos(100πt) + 2 sen(250πt) (t en segundos).1. Dibuje la forma del espectro de x[n].2. Dibuje la forma del espectro de y(t).3. Determine la salida y c (t) si la frecuencia de corte del filtro es f c = 1/(2 ˜T).4. Repita el inciso anterior si la frecuencia de corte es f c = 1/(2T).Procesamiento Digital de Señales U.N.S. 2011
<strong>5.18.</strong> <strong>Ejercicios</strong> 149Ejercicio 10. Una cámara de cine sensa la imagen de una marca sobre una rueda que giraa Ω revoluciones por segundo. La cámara toma una imagen cada T segundos. Determineel máximo período T máx para el cual las imágenes representan el movimiento de la rueda.Discutir que sucede si (i) T = T máx , (ii) T > T máx , o (iii) T < T máx .Ejercicio 11. La figura muestra el espectro en frecuencia de una señal analógica. Se deseadiscretizar esta señal.1. Determine la frecuencia de muestreo.2. ¿Se requiere filtro antialiasing? ¿Por qué?3. Dibuje el módulo del espectro en frecuencia de la señal muestreada.4. Dibuje la respuesta en frecuencia G(Ω) (módulo y fase) de un mantenedor de ordencero que trabaja a la frecuencia de muestreo determinada en el inciso 1.5. Si el mantenedor del inciso anterior se utiliza como filtro de reconstrucción, grafiqueel módulo del espectro de la señal resultante. En base a estos resultados, ¿consideraque el mantenedor de orden cero es un buen filtro reconstructor? Proponga unasolución si la respuesta es negativa.6. (interesante) El espectro de la figura puede pensarse como el resultado de modularuna señal y (t) con una señal m (t) = cos (2π 20 t), ¿Cuál es el espectro de y (t)?¿Puede determinar una frecuencia de muestreo que permita recuperar y (t) a partirde x(t)?IEjercicio 12. Una señal continua x c (t) se muestrea con un tren de pulsos p (t) de ancho τ,período T, y amplitud 1/τ de modo que el área bajo el pulso es unitaria. Específicamente,x m (t) = x c (t) × p (t) , yx[n] = 1 Z nT+τx c (t) p (t) dt ∼ = 1 xc (nT) + x c (nT + τ).TTτ1. Dibuje el espectro de x c (t) , x m (t) , x[n].nT2. ¿Es posible recuperar exactamente x c (t) a partir de x[n]? Si la respuesta es afirmativa,indique de qué manera. En caso contrario, justifique por qué no.Procesamiento Digital de Señales U.N.S. 2011
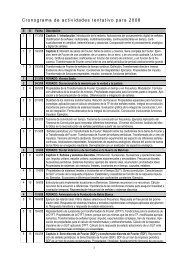
150 5. Muestreo de señalesEjercicio 13. Para un valor apropiado de T, el sistema de la figura1. ¿es lineal?2. ¿es invariante en el tiempo?Para cada inciso, esboce una demostración si la respuesta es afirmativa o de un contraejemploen caso contrario.Ejercicio 14. El sistema continuo de la figura es un “elevador al cuadrado”, s(t) = x 2 c(t) yX c (jΩ) = 0 para |Ω| ≥ 2π 1000. ¿Cuál es el mayor valor de T para el cual y c (t) = x 2 c(t)?Ejercicio 15. El sistema discreto de la figura es un “elevador al cuadrado”, y[n] = x 2 [n]y X c (jΩ) = 0 para |Ω| ≥ 2π 1000. ¿Cuál es el mayor valor de T tal que y c (t) = x 2 c(t)?Ejercicio 16. Para un sistema cuyo diagrama en bloques es similar al de la figura delEjercicio 13, el sistema continuo obedece la ecuación diferencial lineal a coeficientes constantesd 2dt 2 y c (t) + 4 d dt y c (t) + 3y c (t) = x c (t) .Determine la respuesta en frecuencia H e jω del sistema discreto cuando T = 0,1 s.Ejercicio 17. La señal x(t) = e −at e j2π f 0t u(t), a > 0, que no es de banda limitada, semuestrea a una frecuencia f s = 1/T. Compruebe que:1. La magnitud del espectro se la señal continua es:|X( f )| 2 =1a 2 + [2π ( f − f 0 )] 2 .2. La magnitud del espectro de la señal muestreada es:X(e jω ) 2 1=1 − 2e −aT cos[ω − 2π f 0 T)] + e −2aT .Procesamiento Digital de Señales U.N.S. 2011
<strong>5.18.</strong> <strong>Ejercicios</strong> 1513. La magnitud del espectro de N muestras de la señal muestreada esX N (e jω ) 2 = 1 − 2e−aTN cos(ω − 2π f 0 T)N + e −2aTN1 − 2e −aT cos(ω − 2π f 0 T) + e −2aT .MEjercicio 18. Usando MATLAB, grafique los espectros del Ejercicio 17. Para facilitar lacomparación, grafique la amplitud en dB de los tres espectros de potencia, normalizandoel máximo de cada espectro a 0 dB. Dibuje las tres respuestas en un único gráfico utilizandoun eje de frecuencias normalizado: f / f s para |X( f )| 2 , y ω/(2π) para X(e jω ) 2 ,X N (e jω ) 2 . Utilice los siguientes valores de los parámetros: a = 100, f s = 1000. Calculelos espectros para dos valores de f 0 , f A 0= 50 Hz, f B 0= 400 Hz, y tres valores de N:N 1 = 10, N 2 = 20, N 3 = 50.0N = 100N = 200N = 50−5−5−5−10−10−10−15−15−15−20−20−20−25−25−25−30−35X( f )X(e jω )X N(e jω )−400 0.2 0.4 0.6 0.8 1f 0/f s, ω/(2π)−30−35X( f )X(e jω )X N(e jω )−400 0.2 0.4 0.6 0.8 1f 0/f s, ω/(2π)−30−35X( f )X(e jω )X N(e jω )−400 0.2 0.4 0.6 0.8 1f 0/f s, ω/(2π)Espectros de la señal con frecuencia portadora f 0 = 50 Hz.0N = 100N = 200N = 50−5−5−5−10−10−10−15−15−15−20−20−20−25−30X( f )X(e jω )X N(e jω )−350 0.2 0.4 0.6 0.8 1f 0/f s, ω/(2π)−25−30X( f )X(e jω )X N(e jω )−350 0.2 0.4 0.6 0.8 1f 0/f s, ω/(2π)Espectros de la señal con frecuencia portadora f 0 = 400 Hz.−25−30X( f )X(e jω )X N(e jω )−350 0.2 0.4 0.6 0.8 1f 0/f s, ω/(2π)Comentario: En este ejemplo, como la señal se conoce analíticamente, es posible calculartanto el espectro continuo X ( f ) como el espectro discreto X(e jω ). Sin embargo, para unaseñal arbitraria, el único espectro de que puede conocer es X N (e jω ), que se calcula con laTDF de las N muestras adquiridas, con el agregado eventual de ceros para obtener ungráfico “continuo”.Ejercicio 19. La figura (a) muestra un sistema de procesamiento continuo de señalesdiscretas. El sistema continuo con respuesta impulsiva h c (t) es un filtro pasabajos idealcuya respuesta en frecuencia es 1,H c ( f ) =| f | < 10 kHz,0, en caso contrario.Procesamiento Digital de Señales U.N.S. 2011
152 5. Muestreo de señalesExprese y[n] en función de x[n] si:1. T 1 = T 2 = 10 −4 , y x[n] es arbitraria.2. T 1 = 0,25 × 10 −4 , T 2 = 10 −4 , y x[n] = [sinc(n/2)] 2 . X(e jω ) se muestra en la Fig. (b).Ejercicio 20. El osciloscopio Agilent DS03102 tiene un ancho de banda analógico de 60MHz, y una velocidad de muestreo máxima de 1 Gs/s. La memoria de adquisión es de4000 puntos, pero en pantalla sólo se muestran 1200, a razón de 100 puntos por división.1. ¿Cuál es el máximo tiempo de adquisición cuando se utiliza la máxima frecuenciade muestreo?2. ¿Cuál es el menor ajuste posible de la base de tiempos?3. Para una señal senoidal de 60 MHz (frecuencia igual al ancho de banda del osciloscopio)¿cuántos períodos se observan en la pantalla cuando la base de tiemposse ajusta en el valor del inciso anterior (es decir, cuando se muestrea a la máximafrecuencia posible)?4. El osciloscopio se conecta a un generador que entrega una onda senoidal de 1.003kHz. ¿cuál es la frecuencia de muestreo mínima para evitar el aliasing? ¿Cual es elajuste de la base de tiempos, en unidades de tiempo por división, que correspondea esta frecuencia?5. Teniendo en cuenta que las escalas (tanto de la base de tiempos como de los atenuadoresde entrada) siguen la proporción 1:2:5, ¿cuál es el verdadero valor de la basede tiempos que debe elegise en el inciso anterior? ¿Cuántos períodos de la señal seobservan en la pantalla con la base de tiempos en esta posición?6. ¿Cuál debe ser el ajuste de la base de tiempos para observar en la pantalla poco másde un ciclo de la señal?7. Si la base de tiempos se ajusta a 100 ms/div, ¿cuál es la frecuencia de muestreo?¿Hay aliasing? Grafique la forma de onda que se observa en la pantalla, y estime lafrecuencia de la misma a partir de esta medición.8. Para este ajuste de la base de tiempos, grafique el espectro de la señal analógica,el espectro de la señal muestreada, y el espectro de la señal reconstruida, que seobserva en la pantalla del osciloscopio. Compare sus resultados con los obtenidosen el inciso anterior.Procesamiento Digital de Señales U.N.S. 2011
<strong>5.18.</strong> <strong>Ejercicios</strong> 153Ejercicio 21. Las figuras (a), (b) (c) muestran tres señales definidas en el intervalo [0, 2T]comox(t) =y(t) =z(t) = A cos 2π f0 t, 0 ≤ t ≤ T = 2/ f 0 ,0, en caso contrario, A cos 2π(2 f0 )t, 0 ≤ t ≤ T = 2/ f 0 ,0, en caso contrario,x(t) + y(t − T).1. Calcular y graficar los espectros X( f ), Y( f ), Z( f ).2. Determinar y graficar los espectros X(e jω ), Y(e jω ), y Z(e jω ) de las señales de longitudfinita x[n], y[n] y z[n] que resultan de muestrear x(t), y(t) y z(t) con unafrecuencia f s (la misma para las tres señales) durante 2T = 4/ f 0 segundos. ¿Cuál esel mínimo valor posible de f s ? ¿Cuál es la longitud M (en muestras) de las señalesdiscretas?3. Se desea distinguir la ocurrencia o no de las señales (a) , (b) o (c) usando la TDF. Determinarel orden N de la TDF que permite detectar “fácilmente” sin ambigüedadescualquiera de los casos.4. El número N de muestras requeridas para la TDF, ¿coincide con el número M delinciso (2)? ¿Es conveniente muestrear a una frecuencia mayor o menor que la calculadaen ese inciso? ¿Por qué?5. Graficar los espectros X[k], Y[k], Z[k] que resultan de calcular las TDF del incisoanterior.6. ¿Cuáles muestras k i de X[k] (o Y[k], Z[k]) deben observarse para distinguir los casos(a) , (b) o (c)?Ejercicio 22. El ancho de banda de interés de una señal se extiende desde 0 hasta f M Hz,y desde allí el módulo de su espectro decae a razón de α dB/década. Se dispone de unprefiltro analógico que tiene una banda de paso plana desde 0 hasta f M Hz, y a partir deesa frecuencia la atenuación crece a razón de β dB/década. Se necesita que en el rangoentre 0 y f M las réplicas frecuenciales debidas al muestreo queden atenuadas más de AdB. Demuestre que la mínima frecuencia de muestreo que debe utilizarse para cumplireste requisito es f s = f M 1 + 10α+βA.Procesamiento Digital de Señales U.N.S. 2011
154 5. Muestreo de señalesEjercicio 23. El módulo del espectro de la señal de entrada a un sistema es|X( f )| =1p1 + (10 −4 f ) 8 .La mayor frecuencia de interés es de 20 kHz, y la señal se muestrea a f s Hz. Se necesitaque las réplicas ocasionadas por el muestreo queden atenuadas en más de 60 dB relativosa la amplitud de la señal, esto es, deben ser al menos 60 dB menores que la amplitud de lascomponentes de la señal en el rango de frecuencias de interés entre 0 y 20 kHz.1. Determine la menor frecuencia de muestreo f s que se debe adoptar si no se colocaun prefiltro analógico.2. Se dispone de un prefiltro analógico tipo Butterworth de tercer orden, cuya respuestaen frecuencia tiene magnitud|H( f )| =1p1 + ( f / f0 ) 6 .Es necesario que la atenuación del prefiltro en el rango de frecuencias de interés seamenor a 1 dB. ¿Cuál es el valor de la frecuencia de normalización f 0 en este caso?¿Cuál es la mínima frecuencia de muestreo f s que debe utilizarse? Compare estecálculo exacto con el método aproximado detallado en el Ejercicio 22.Ejercicio 24. Para el sistema de procesamiento del Ejercicio 23, se fija la frecuencia demuestreo a un valor prefijado que es menor al mínimo determinado en ese ejercicio,pero mayor que 2 f M . Para lograr la atenuación deseada de las réplicas causadas por elmuestreo, se utiliza un filtro Butterworth de mayor orden, con una banda de transiciónmás abrupta. El módulo de la respuesta en frecuencia de un filtro Butterworth de ordenN es1|H( f )| = p1 + ( f / f0 ) . 2NDada f s , determine el mínimo orden N del filtro de modo que la atenuación en la bandade paso sea menor que A P = 1 dB, y tal que la atenuación de las réplicas sea superior aA = 60 dB.CEjercicio 25. La figura ilustra el esquema básico de un oscilador digital sinusoidal implementadosegún la técnica de “look-up table”. Las muestras de un ciclo de la señalx[n] = cos(2πn/N), n = 0, 1, . . . , N se almacenan consecutivamente en el espacio dememoria. La señal de salida se genera direccionando secuencialmente las distintas posicionesde memoria, volviendo al principio cuando el argumento supera el valor 2π. Estopuede lograrse utilizando direccionamiento “módulo N” (una opción habitual en losprocesadores dedicados), es decir, implementando un buffer circular. Las muestras de x[n]se envían al conversor D/A cada T segundos.Procesamiento Digital de Señales U.N.S. 2011
<strong>5.18.</strong> <strong>Ejercicios</strong> 1551. Muestre que la frecuencia f 0 de la señal de salida puede ajustarse cambiando T.2. Si T se deja fijo, determine cuántas señales analógicas distintas pueden generarsecon la misma tabla.Ejercicio 26. En el sistema de la figura, x[n] = x c (nT) e y[n] = x[2n].1. Si x c (t) tiene una transformada de Fourier tal que X c (jΩ) = 0, |Ω| > 2π 100, ¿cuáles el valor de T que asegura que X e jω = 0, π/2 < |ω| < π?2. Calcule T ′ de modo que y c (t) = x c (t).CEjercicio 27. El método BPSK (binary phase shift keying) es una de las manera más simplesde transmitir información digital. Para una sucesión de bits b[n], que ocurren cada Tsegundos, se genera una señal x (t) de tipo NRZ (non return to zero) haciendox (t) = 1, si b[n] = 0,−1, si b[n] = 1,para nT ≤ t < (n + 1)T.donde T es el intervalo de bit de la señal. Una forma de onda típica de este tipo de señalesse muestra en la figura.Una señal NRZ x (t) con intervalo de bit T = 5 × 10 −4 segundos modula una portadoracompleja e j2π f 0t , generando la señal complejay(t) = x (t) e j2π f 0t .Se sabe que la frecuencia de la portadora está en el rango | f 0 | < 1000 Hz, y se deseaestimar f 0 a partir de un intervalo de medición finito de la señal BPSK modulada.1. Explique porqué será dificultoso estimar f 0 a partir del módulo de la TDF de y(t)(utilizando ventanas o no). En caso de duda, experimente con MATLAB.2. Para estimar f 0 se propone el procedimiento que se detalla a continuación. Expliqueporqué este método da resultados correctos, y determine el intervalo de muestreonecesario para determinar f 0 sin ambigüedades.a) Muestrear la señal y elevar el resultado al cuadrado. Es decir, calcular z[n] =y 2 (nT).Procesamiento Digital de Señales U.N.S. 2011
156 5. Muestreo de señalesb) Estimar f 0 a partir de la magnitud de la TDF de z[n].Ejercicio 28. En la Sección 5.11.1 se estudia el uso de un prefiltro para evitar el aliasing. Enla práctica, el filtro antialiasing no es ideal, pero las características no ideales (atenuaciónen la banda de paso, zona de transición, etc.) se pueden compensar al menos parcialmentecon un sistema de tiempo discreto ubicado a la salida del conversor C/D. En la figura semuestran dos sistemas de procesamiento de datos, uno de ellos con un filtro antialiasingideal (Sistema 1), y otro con un filtro antialiasing “real” (Sistema 2); las respuestas enfrecuencia del filtro ideal H i a(e jω ) y del filtro “real” H r a(e jω ) también se muestran en lafigura, donde f c = F s /2, y f p = 3F s /8. Diseñar el sistema discreto H(e jω ) del Sistema 2para que las sucesiones x[n] e y[n] sean iguales.Procesamiento Digital de Señales U.N.S. 2011
5.19. Tablas útiles 1575.19. Tablas útilesMuestreodominio frecuencial ( f ) dominio temporal dominio frecuencial (Ω)P T ( f ) = 1 T ∑ kX c ( f ) x c (t) X c (Ω)δ( f −kF s ) p T (t) = ∑ δ(t − nT)nP T (Ω) = 2π T ∑ nδ(Ω−kΩ s )X s ( f ) = X c ( f ) × P T ( f ) x s (t) = x c (t) ∗ p T (t) X s (Ω) = 12π X c(Ω) × P T (Ω)= T∑ 1 kX c ( f −kF s ) = ∑x c (nT)δ(t−nT) = T∑ 1 kX c (Ω−kΩ s )nX(e jω ) = X s ( f )| f =ωFs2π = 2πTωX c (ω F s= 1 T∑kh i= T∑1 X Fs c 2π (ω−2πk)k2π −kF s) x[n] = x c (t)| t=nT = T∑1kX s (Ω)| Ω=ωΩs2π = ω TX c (ω Ω s2π −kΩ s)= T∑1 X 1 c T (ω−2πk)kReconstruccióndominio frecuencial ( f ) dominio temporal dominio frecuencial (Ω)Y(e jω ) y[n] Y(e jω )Y s ( f ) = Y(e jω )| ω= f 2πFs= f 2πT(T, | f | F s2y s (t) = ∑ y[n]δ(t−nT)nh r (t) = senπtTπtT= sinc t THr (Ω) =Y s (Ω) = Y(e jω )| ω=Ω 2πΩs =ΩT(T, |Ω| Ω s2 = π TY r ( f ) = H r ( f )Y s ( f ) y r (t) = ∑ ny[n]h r (t−nT) Y r (Ω) = H r (Ω)Y s (Ω)= TY(e jω ) ω= f 2π=Fs= f 2πT ∑ ny[n] sinc t−nT T= TY(e jω )| ω=Ω 2πΩs =ΩTsi | f | < F s2si Ω| < Ω s2 = π TProcesamiento Digital de Señales U.N.S. 2011
158 5. Muestreo de señalesProcesamiento discreto de señales continuasdominio frecuencial ( f ) dominio temporal dominio frecuencial (Ω)X c ( f ) x c (t) X c (Ω)h iX(e jω ) = T∑1 X Fs c 2π (ω−2πk)kx[n] = x c (t)| t=nTX(e jω ) = T∑1 X 1 c T (ω−2πk)kY(e jω ) = H(e jω )X(e jω ) y[n] = h[n] ∗ x[n] Y(e jω ) = H(e jω )X(e jω )Y s ( f ) = Y(e jω )| ω= f 2πFs= f 2πTy s (t) = ∑y[n]δ(t−nT)nY s (Ω) = Y(e jω )| ω=Ω 2πΩs =ΩTY r ( f ) = H r ( f )Y s ( f ) y r (t) = ∑ ny[n]h r (t−nT) Y r (Ω) = H r (Ω)Y s (Ω)= TH(e jω )X(e jω )| ω= f 2π =Fs∑ ny[n] sinc t−nT T= TH(e jω )X(e jω )| ω=Ω 2πΩs= f 2πT=ΩT8>:H(e jω )| ω= f 2πFs= f 2πTsi | f | < F s2si | f | > F s28>:H(e jω )| ω=Ω 2πΩs=ΩTsi |Ω| < Ω s2si |Ω| > Ω s2Procesamiento continuo de señales discretasdominio frecuencial ( f ) dominio temporal dominio frecuencial (Ω)X c ( f ) = TX(e jω )| ω= f 2πFsx c (t) = ∑ nx[n]h r (t−nT) X c (Ω) = TX(e jω )| ω=ΩTY c ( f ) = H c ( f )X c ( f ) y c (t) = h r (t) ∗ x c (t) Y c (Ω) = H c (Ω)X c (Ω)Y(e jω ) = 1 T Y c( f )| f =ωFs2πy[n] = y c (t)| t=nTY(e jω ) = 1 T Y c(Ω)| Ω=ωΩs2π = ω TH(e jω ) =H c ( f )| f =ωFs , |ω| < π H(e jω ) = H c (Ω)| Ω=ω2πT, |ω| < πProcesamiento Digital de Señales U.N.S. 2011
5.19. Tablas útiles 159Decimaciónx f [n]= x[n] ∗ h PB [n]= ∑ x[l]h PB [n − l] ⇔ X f e jω = H PB e jω X e jωlx d [n] = x f [nM] ⇔ X d e jω = 1 MM−1 ∑ X f er=0ω−2πrj(M ) Interpolaciónx e [n] =(x[n/L], si n = 0, ±L, ±2L, . . .0, en caso contrario.x i [n] = x e [n] ∗ h I [n] = ∑ x i [l]h[n − l]l= ∑ x[l]h[n − lL]l⇔ X e e jω = X e jωL⇔ X i e jω = H I e jω X e e jω= L X e jωL , |ω| < π/LCambio de la frecuencia de muestreo por un factor no enteroIntercambio de filtrado y sub/sobre muestreoProcesamiento Digital de Señales U.N.S. 2011
160 5. Muestreo de señalesProcesamiento Digital de Señales U.N.S. 2011