Chapitre I Introduction : Objectif de l'étude - OATAO (Open Archive ...
Chapitre I Introduction : Objectif de l'étude - OATAO (Open Archive ...
Chapitre I Introduction : Objectif de l'étude - OATAO (Open Archive ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Dans un schéma implicite, chaque nœud interagit a priori avec l’ensemble <strong>de</strong>s autres<br />
nœuds <strong>de</strong> la structure. La résolution du système nécessite à chaque itération l’inversion d’une<br />
matrice pleine, ce qui se révèle très coûteux en temps <strong>de</strong> calcul.<br />
Dans un schéma explicite, en revanche, un nœud n’interagit qu’avec ses voisins<br />
immédiats. Cela implique qu’au cours <strong>de</strong> la résolution, seule la matrice [M] <strong>de</strong>s masses doit<br />
être inversée. La métho<strong>de</strong> <strong>de</strong>s masses concentrées permettant <strong>de</strong> construire une matrice [M]<br />
diagonale, cette inversion est évi<strong>de</strong>nte et donc très rapi<strong>de</strong>.<br />
Par contre, la stabilité du calcul explicite, conditionnée par une bonne propagation <strong>de</strong><br />
l’information d’élément à élément, impose au calcul un pas <strong>de</strong> temps réduit dépendant du<br />
maillage et <strong>de</strong>s propriétés du matériau. Au contraire, certains schémas implicites sont<br />
inconditionnellement stables, ce qui autorise l’utilisation d’un pas <strong>de</strong> temps plus grand et<br />
réduit d’autant le nombre d’itérations nécessaires à la résolution du calcul. Cependant, l’usage<br />
montre que, en dynamique rapi<strong>de</strong>, on obtient, à précision équivalente, <strong>de</strong>s résultats à moindre<br />
coût temporel en explicite qu’en implicite.<br />
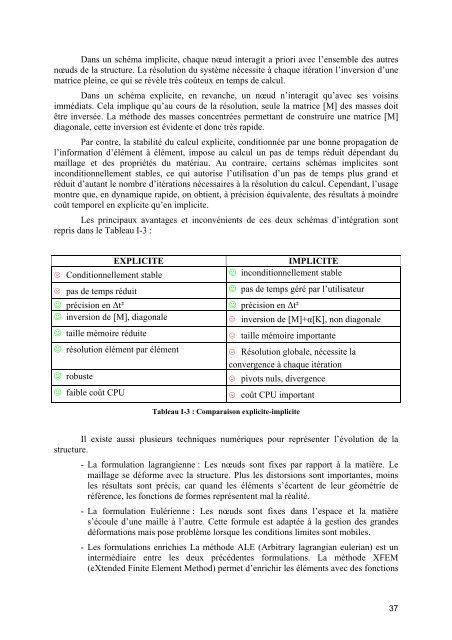
Les principaux avantages et inconvénients <strong>de</strong> ces <strong>de</strong>ux schémas d’intégration sont<br />
repris dans le Tableau I-3 :<br />
EXPLICITE<br />
☹ Conditionnellement stable<br />
☹ pas <strong>de</strong> temps réduit<br />
☺ précision en Δt²<br />
☺ inversion <strong>de</strong> [M], diagonale<br />
☺ taille mémoire réduite<br />
☺ résolution élément par élément<br />
☺ robuste<br />
☺ faible coût CPU<br />
IMPLICITE<br />
☺ inconditionnellement stable<br />
☺ pas <strong>de</strong> temps géré par l’utilisateur<br />
☺ précision en Δt²<br />
☹ inversion <strong>de</strong> [M]+α[K], non diagonale<br />
☹ taille mémoire importante<br />
☹ Résolution globale, nécessite la<br />
convergence à chaque itération<br />
☹ pivots nuls, divergence<br />
☹ coût CPU important<br />
Tableau I-3 : Comparaison explicite-implicite<br />
Il existe aussi plusieurs techniques numériques pour représenter l’évolution <strong>de</strong> la<br />
structure.<br />
- La formulation lagrangienne : Les nœuds sont fixes par rapport à la matière. Le<br />
maillage se déforme avec la structure. Plus les distorsions sont importantes, moins<br />
les résultats sont précis, car quand les éléments s’écartent <strong>de</strong> leur géométrie <strong>de</strong><br />
référence, les fonctions <strong>de</strong> formes représentent mal la réalité.<br />
- La formulation Eulérienne : Les nœuds sont fixes dans l’espace et la matière<br />
s’écoule d’une maille à l’autre. Cette formule est adaptée à la gestion <strong>de</strong>s gran<strong>de</strong>s<br />
déformations mais pose problème lorsque les conditions limites sont mobiles.<br />
- Les formulations enrichies La métho<strong>de</strong> ALE (Arbitrary lagrangian eulerian) est un<br />
intermédiaire entre les <strong>de</strong>ux précé<strong>de</strong>ntes formulations. La métho<strong>de</strong> XFEM<br />
(eXten<strong>de</strong>d Finite Element Method) permet d’enrichir les éléments avec <strong>de</strong>s fonctions<br />
37