

PCSI1 11-12 TD no6 : Lois de Newton et énergie
PCSI1 11-12 TD no6 : Lois de Newton et énergie
PCSI1 11-12 TD no6 : Lois de Newton et énergie
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
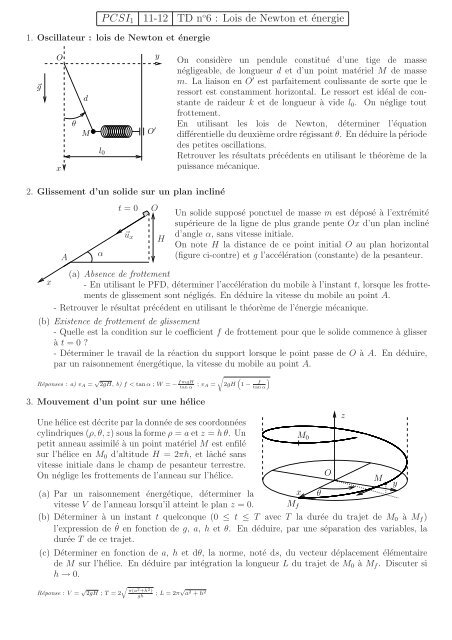
PCSI <strong>11</strong>1-<strong>12</strong> <strong>TD</strong> n o 6 : <strong>Lois</strong> <strong>de</strong> <strong>Newton</strong> <strong>et</strong> énergie1. Oscillateur : lois <strong>de</strong> <strong>Newton</strong> <strong>et</strong> énergie⃗gOxθdMl 0O ′yOn considère un pendule constitué d’une tige <strong>de</strong> massenégligeable, <strong>de</strong> longueur d <strong>et</strong> d’un point matériel M <strong>de</strong> massem. La liaison en O ′ est parfaitement coulissante <strong>de</strong> sorte que leressort est constamment horizontal. Le ressort est idéal <strong>de</strong> constante<strong>de</strong> rai<strong>de</strong>ur k <strong>et</strong> <strong>de</strong> longueur à vi<strong>de</strong> l 0 . On néglige toutfrottement.En utilisant les lois <strong>de</strong> <strong>Newton</strong>, déterminer l’équationdifférentielle du <strong>de</strong>uxième ordre régissant θ. En déduire la pério<strong>de</strong><strong>de</strong>s p<strong>et</strong>ites oscillations.R<strong>et</strong>rouver les résultats précé<strong>de</strong>nts en utilisant le théorème <strong>de</strong> lapuissance mécanique.2. Glissement d’un soli<strong>de</strong> sur un plan inclinéxAαt = 0⃗u xOHUn soli<strong>de</strong> supposé ponctuel <strong>de</strong> masse m est déposé à l’extrémitésupérieure <strong>de</strong> la ligne <strong>de</strong> plus gran<strong>de</strong> pente Ox d’un plan inclinéd’angle α, sans vitesse initiale.On note H la distance <strong>de</strong> ce point initial O au plan horizontal(figure ci-contre) <strong>et</strong> g l’accélération (constante) <strong>de</strong> la pesanteur.(a) Absence <strong>de</strong> frottement- En utilisant le PFD, déterminer l’accélération du mobile à l’instant t, lorsque les frottements<strong>de</strong> glissement sont négligés. En déduire la vitesse du mobile au point A.- R<strong>et</strong>rouver le résultat précé<strong>de</strong>nt en utilisant le théorème <strong>de</strong> l’énergie mécanique.(b) Existence <strong>de</strong> frottement <strong>de</strong> glissement- Quelle est la condition sur le coefficient f <strong>de</strong> frottement pour que le soli<strong>de</strong> commence à glisserà t = 0 ?- Déterminer le travail <strong>de</strong> la réaction du support lorsque le point passe <strong>de</strong> O à A. En déduire,par un raisonnement énergétique, la vitesse du mobile au point A.Réponses : a) v A = √ √ ( )2gH, b) f < tan α ; W = − fmgHtan α ; v A = 2gH 1 − ftan α3. Mouvement d’un point sur une héliceUne hélice est décrite par la donnée <strong>de</strong> ses coordonnéescylindriques (ρ,θ,z) sous la forme ρ = a <strong>et</strong> z = h θ. Unp<strong>et</strong>it anneau assimilé à un point matériel M est enfilésur l’hélice en M 0 d’altitu<strong>de</strong> H = 2πh, <strong>et</strong> lâché sansvitesse initiale dans le champ <strong>de</strong> pesanteur terrestre.On néglige les frottements <strong>de</strong> l’anneau sur l’hélice.(a) Par un raisonnement énergétique, déterminer la x θvitesse V <strong>de</strong> l’anneau lorsqu’il atteint le plan z = 0. M f(b) Déterminer à un instant t quelconque (0 ≤ t ≤ T avec T la durée du traj<strong>et</strong> <strong>de</strong> M 0 à M f )l’expression <strong>de</strong> ˙θ en fonction <strong>de</strong> g, a, h <strong>et</strong> θ. En déduire, par une séparation <strong>de</strong>s variables, ladurée T <strong>de</strong> ce traj<strong>et</strong>.(c) Déterminer en fonction <strong>de</strong> a, h <strong>et</strong> dθ, la norme, noté ds, du vecteur déplacement élémentaire<strong>de</strong> M sur l’hélice. En déduire par intégration la longueur L du traj<strong>et</strong> <strong>de</strong> M 0 à M f . Discuter sih → 0.Réponse : V = √ 2gH ; T = 2√ π(a 2 +h 2 )gh ; L = 2π √ a 2 + h 2M 0OzMy
4. Sphère creuseAACθ 0M⃗gCθ 0MSoit une sphère creuse <strong>de</strong> centre C <strong>et</strong> <strong>de</strong> rayonR, d’axe vertical OA, fixe dans le référentiel terrestregaliléen. On considère un point matérielM <strong>de</strong> masse m qui peut glisser sans frottementsur les <strong>de</strong>ux faces interne <strong>et</strong> externe <strong>de</strong> la sphère.OO(a) On positionne sans vitesse initiale M à l’intérieur <strong>de</strong> la sphère à un angle θ 0 = (CO,CM) (figure<strong>de</strong> gauche). Établir l’équation différentielle en θ <strong>et</strong> l’expression <strong>de</strong> la composante −→ R N <strong>de</strong> laréaction <strong>de</strong> la sphère. Donner θ(t) <strong>et</strong> −→ R N dans le cas d’un p<strong>et</strong>it angle θ 0 .Indication : on se limitera aux termes au plus d’ordre un.(b) On positionne sans vitesse initiale M à l’extérieur <strong>de</strong> la sphère à un angle θ 0 = (CA,CM) (figure<strong>de</strong> droite). Établir les équations donnant θ <strong>et</strong> −→ R N . Résoudre l’équation en θ pour les p<strong>et</strong>itsangles. On se limitera aux termes au plus d’ordre un. Quelle est la trajectoire? Discuter lavalidité <strong>de</strong> l’expression donnant θ si les angles ne sont pas p<strong>et</strong>its.Pour quel angle le point matériel M quitte-t-il la surface sphérique?Réponses : a) θ(t) = θ 0 cos√ gR t, b) θ(t) = θ 0ch√ gR t5. Anneau sur une cerceauUn anneau M, <strong>de</strong> masse m = 2 g, peut glisser sans frottement le long d’uncerceau vertical <strong>de</strong> rayon R = 10 cm. Il est soumis <strong>de</strong> la part du point Afixe à une force attractive F ⃗ = −kAM −−→ avec k = 1 N.m −1 . M est repérépar l’angle θ.On prend g = 9, 81 m.s −2 .(a) Déterminer, en appliquant le principe fondamental, les positions d’équilibre <strong>de</strong> M. Discuterphysiquement leur stabilité.(b) Exprimer le travail élémentaire <strong>de</strong> ⃗ F, en déduire l’énergie potentielle dont dérive ⃗ F.(c) Déterminer l’énergie potentielle <strong>de</strong> M. R<strong>et</strong>rouver les positions d’équilibre précé<strong>de</strong>ntes <strong>et</strong> étudierleur stabilité.6. Particule dans un puits <strong>de</strong> potentielUne particule <strong>de</strong> masse m se déplace sans frottements sur un axe (Ox) dans un référentiel galiléendans le champ <strong>de</strong> force −→ F = F(x)⃗u x dérivant <strong>de</strong> l’énergie potentielle :E p (x) = m 2 ω2 (x 2 + a4x 2)où ω > 0 <strong>et</strong> a > 0. On négligera l’existence <strong>de</strong> toute autre force. On se limite au domaine x > 0.Déterminer les positions d’équilibre <strong>et</strong> leur stabilité. Calculer la pério<strong>de</strong> <strong>de</strong>s oscillations <strong>de</strong> faibleamplitu<strong>de</strong> autour <strong>de</strong> la position d’équilibre, si elle existe. Que <strong>de</strong>vient-elle si les oscillations ne sontpas <strong>de</strong> faible amplitu<strong>de</strong> (on l’exprimera dans ce cas en fonction d’une intégrale qu’on ne chercherapas à calculer)?On prendra comme condition initiale x = a <strong>et</strong> ẋ = v 0 .Réponse : T = π ω7. Anneau sur une pisteOn considère le dispositif ci-<strong>de</strong>ssous où un anneau assimilable à un point matériel M <strong>de</strong> masse mest enfilé sur une tige formée <strong>de</strong> <strong>de</strong>ux parties circulaires (1) <strong>et</strong> (2) <strong>de</strong> rayons R 1 <strong>et</strong> R 2 , <strong>de</strong> centres C 1<strong>et</strong> C 2 , dans le plan vertical. On suppose R 2 > R 1 . On repère la position <strong>de</strong> l’anneau par l’angle θ.AOθM
Sur la partie (1) θ varie entre − π <strong>et</strong> π. Sur la partie (2), θ varie entre π <strong>et</strong> 5π . On note g = ||⃗g||2 2l’accélération <strong>de</strong> la pesanteur. Dans tout le problème, on suppose que le mouvement s’effectue √ sansfrottements. On raisonne dans le référentiel lié à la piste, supposé galiléen. On pose ω 1 = gR 1<strong>et</strong>ω 2 =√gR 2. Faire le bilan <strong>de</strong>s forces. De quelle nature est la liaison entre la piste <strong>et</strong> l’anneau?(a) Déterminer l’énergie potentielle E p <strong>de</strong> M en fonction <strong>de</strong> θ lorsque l’anneau est entre A <strong>et</strong> B(portion (1) <strong>de</strong> la piste) . On choisira E p (θ = π) = 0.zB(b) L’anneau est initialement enA tel que θ = − π . Il est lancé2avec une vitesse initiale <strong>de</strong>⃗gnorme V 0 = ||⃗v(t = 0)||. ParA C 1 (1)un raisonnement énergétique,R 1déterminer la vitesse V B duθ+ point M lorsqu’il est en B.MÀ quelle condition sur V 0 leEpoint M peut-il effectivementatteindre B? On considère(2)C 2S c<strong>et</strong>te condition vérifiée danstoute la suite.θ(c) Le point M est à présentsur la portion (2) <strong>de</strong> laR 2piste (cf figure). Déterminerl’expression <strong>de</strong> l’énergie potentielle<strong>de</strong> M en fonction <strong>de</strong>θ pour θ ∈ [π, 5π ]. L’origine2<strong>de</strong> l’énergie potentielle estMtoujours prise en B.F(d) Par un raisonnement énergétique, déterminer la vitesse V S du point M lorsqu’il atteint S (θ = 5π)2en fonction <strong>de</strong> V B , puis en fonction <strong>de</strong> V 0 . À quelle condition sur V 0 l’anneau sort-il <strong>de</strong> la pisteen S?(e) On veut r<strong>et</strong>rouver les résultats précé<strong>de</strong>nts en raisonnant graphiquement.i. Tracer l’énergie potentielle E p en fonction <strong>de</strong> θ pour θ ∈ [− π, 5π].2 2ii. Déterminer l’énergie mécanique E 0 <strong>de</strong> M en fonction <strong>de</strong> V 0 , m, g <strong>et</strong> R 1 .iii. En raisonnant graphiquement, déterminer les différents types <strong>de</strong> mouvement possibles <strong>et</strong>r<strong>et</strong>rouver les résultats <strong>de</strong>s questions précé<strong>de</strong>ntes. Qu’appelle-t-on état lié? État <strong>de</strong> diffusion?8. La molécule d’ammoniaczz00 <strong>11</strong>00 <strong>11</strong>xH010101ON00 <strong>11</strong>00 <strong>11</strong>00 <strong>11</strong>00 <strong>11</strong>HHyDans un modèle simplifié <strong>de</strong> la molécule d’ammoniacNH 3 , les trois atomes d’hydrogène H forment la based’une pyrami<strong>de</strong> dont l’atome d’azote N <strong>de</strong> masse moccupe le somm<strong>et</strong>.Les trois atomes d’hydrogène sont fixes dansle référentiel du laboratoire supposé galiléen <strong>et</strong>définissent le plan (xOy).L’atome d’azote est en mouvement suivant l’axe(Oz) perpendiculaire au plan défini par les atomesd’hydrogène. Il peut passer <strong>de</strong> part <strong>et</strong> d’autre <strong>de</strong> ceplan <strong>et</strong> sa cote est notée z.Le champ <strong>de</strong> pesanteur est négligeable pour décrire c<strong>et</strong>te structure atomique <strong>et</strong>la résultante <strong>de</strong>s forces qui s’exercent sur l’atome d’azote N supposé ponctuelest : −→ F = −β z (z 2 − a 2 )⃗u z où les constantes β <strong>et</strong> a sont positives.
(a) Déterminer l’énergie potentielle E p dont dérive la force −→ F . L’origine <strong>de</strong> c<strong>et</strong>te énergie potentielleest choisie en z = 0. En déduire les positions d’équilibre.(b) Donner, sans démonstration, la condition <strong>de</strong> stabilité d’un équilibre <strong>et</strong> déterminer les positionsd’équilibre stables <strong>et</strong> instables <strong>de</strong> l’atome d’azote. Représenter E p en fonction <strong>de</strong> z lorsque z varie<strong>de</strong> −∞ à +∞.(c) Une énergie E ≤ 1 4 β a4 est cédée au système au moment où l’atome d’azote est dans une positiond’équilibre stable z s . Montrer graphiquement que l’atome d’azote va osciller entre <strong>de</strong>ux valeurslimites z 1 <strong>et</strong> z 2 . Quel nom porte un tel état?On considère <strong>de</strong> p<strong>et</strong>ites oscillations autour <strong>de</strong> z s . Pour cela, on pose z = z s + q avec |q| ≪ |z s |.Faire un développement <strong>de</strong> E p à l’ordre le plus bas non nul en q. En déduire l’énergie mécanique<strong>de</strong> l’atome d’azote en fonction <strong>de</strong> q <strong>et</strong> ˙q. En déduire la fréquence <strong>de</strong>s p<strong>et</strong>ites oscillations.(d) Que se passe-t-il si l’énergie cédée E est supérieure à 1 4 β a4 ?9. Bille sur une surface hyperboliqueOn considère un référentiel galiléen associé au repère orthonormé (O,⃗u x ,⃗u y ,⃗u z ). L’axe (Oz) estvertical ascendant. La position d’un point M sera définie par ses coordonnées cylindriques r, θ <strong>et</strong> z.On notera respectivement ⃗u r <strong>et</strong> ⃗u θ les vecteurs unitaires déduits <strong>de</strong> ⃗u x <strong>et</strong> ⃗u y par rotation d’angle θautour <strong>de</strong> (Oz).(a) Faire un <strong>de</strong>ssin <strong>et</strong> exprimer le vecteur position −−→ OM dans la base cylindrique.(b) En déduire ( la vitesse ⃗v <strong>et</strong> l’accélération ⃗a dans la base cylindrique. Montrer que : ⃗a.⃗u θ =1 dr dt r2 dθdt).(c) On étudie le mouvement d’une bille d’acier M, <strong>de</strong> masse m, assimilée à un point matériel, sur unesurface <strong>de</strong> révolution. La surface sur laquelle roule la bille est engendrée par la révolution d’uneportion d’hyperbole : z = −k avec k > 0. On néglige les frottements. La réaction du support estrnotée : −→ R = R r ⃗u r + R θ ⃗u θ + R z ⃗u z . Justifier sans calcul que R θ = 0.(d) Faire un bilan <strong>de</strong>s forces s’exerçant sur la bille. Préciser si ces forces dérivent d’une énergiepotentielle. Dans l’affirmative, préciser l’expression <strong>de</strong> l’énergie potentielle associée en fonction<strong>de</strong> la variable r uniquement. On choisira l’origine <strong>de</strong> l’énergie potentielle lorsque r tend versl’infini.(e) Écrire le principe fondamental <strong>de</strong> la Dynamique <strong>et</strong> faire la projection dans la base cylindrique.En déduire que la quantité r 2 dθ est une constante, que l’on notera C.dt(f) Exprimer l’énergie mécanique sous la forme : E m = 1 m α 2 ṙ2 + 1 m C2 − mgk . Déterminer α en2 r 2 rfonction <strong>de</strong> k <strong>et</strong> r. Que peut-on dire <strong>de</strong> l’énergie mécanique?(g) On peut définir une énergie potentielle ”effective” : E peff = 1 m C2 . Tracer l’allure <strong>de</strong>2 rc<strong>et</strong>te énergie potentielle effective en fonction <strong>de</strong> r. En fonction <strong>de</strong> la valeur <strong>de</strong> l’énergie mécaniqueinitiale du système E 0 , discuter le caractère lié ou libre du mouvement.r 2 − mgk(h) Pour quelle valeur <strong>de</strong> r a-t-on un mouvement circulaire? On exprimera le rayon du mouvementcirculaire r c en fonction <strong>de</strong> C, g <strong>et</strong> k.(i) On lance la bille d’une distance r 0 avec une vitesse ⃗v 0 . Préciser la direction <strong>et</strong> le module <strong>de</strong> ⃗v 0pour avoir un mouvement circulaire.













