2 Servomoteurs rotatifs sans ressort de rappel - Siemens Schweiz AG
2 Servomoteurs rotatifs sans ressort de rappel - Siemens Schweiz AG
2 Servomoteurs rotatifs sans ressort de rappel - Siemens Schweiz AG

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Table <strong>de</strong>s matières1 Introduction...................................................................................................51.1 Historique <strong>de</strong>s modifications du document.....................................................51.2 A propos <strong>de</strong> ce document...............................................................................51.3 Contenu du document ....................................................................................52 <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong>...........................................62.1 Domaines d'application ..................................................................................62.2 Références et désignations............................................................................62.3 Description <strong>de</strong>s fonctions ...............................................................................72.3.1 Description complémentaire <strong>de</strong>s fonctions pour les moteurs à actionprogressive.....................................................................................................82.4 Appareils <strong>de</strong> régulation et <strong>de</strong> comman<strong>de</strong>.......................................................82.5 Construction et exécution...............................................................................92.6 Eléments <strong>de</strong> réglage et <strong>de</strong> comman<strong>de</strong>.........................................................103 Technique....................................................................................................113.1 Moteur ..........................................................................................................113.2 Plage <strong>de</strong> rotation et limitation mécanique ....................................................113.3 Contacts auxiliaires et signaux <strong>de</strong> comman<strong>de</strong> .............................................123.4 Fonction <strong>de</strong> caractéristique réglable.............................................................133.5 Zone neutre ..................................................................................................144 Indications pour l'ingénierie......................................................................154.1 Remarques pour la sécurité .................................Erreur ! Signet non défini.4.2 Prescriptions spécifiques aux appareils .......................................................164.3 Indications concernant l'optimisation du point <strong>de</strong> vue <strong>de</strong> la CEM ................174.4 Détermination du type <strong>de</strong> servomoteur ........................................................175 Indications pour le montage......................................................................196 Indications pour le câblage .......................................................................206.1 Longueurs <strong>de</strong> ligne et section <strong>de</strong>s câbles ....................................................206.2 Câblage <strong>de</strong>s servomoteurs à comman<strong>de</strong> trois points ..................................226.3 Câblage <strong>de</strong>s servomoteurs à comman<strong>de</strong> progressive .................................237 Remarques pour la mise en service .........................................................247.1 Vérification générale.....................................................................................247.2 Contrôle électrique du fonctionnement.........................................................248 Caractéristiques techniques .....................................................................269 Schémas......................................................................................................289.1 Schémas <strong>de</strong>s connexions.............................................................................289.2 Repérage <strong>de</strong>s câbles ...................................................................................299.3 Schémas <strong>de</strong> raccor<strong>de</strong>ment (comman<strong>de</strong> 3 points)........................................309.4 Schémas <strong>de</strong> raccor<strong>de</strong>ment (comman<strong>de</strong> progressive)..................................319.4.1 Application type ............................................................................................319.4.2 Raccor<strong>de</strong>ment spécial pour comman<strong>de</strong> progressive ...................................3110 Indications pour l'élimination <strong>de</strong>s appareils............................................32Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.20053/36
11 Annexe.........................................................................................................3311.1 Encombrements pour GDB / GLB / GSF...1E...............................................3311.2 Encombrements pour GDB / GLB...1J et pour GDB / GLB...1L ...................3311.3 Documents référencés..................................................................................344/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
1 Introduction1.1 Historique <strong>de</strong>s modifications du documentModifications Date Chapitre PagesExtension <strong>de</strong> la gamme aux modèlesGDB / GLB...1J et GDB / GLB...1LRaccor<strong>de</strong>ment électrique en parallèle <strong>de</strong>servomoteurs17.06.2004 tousLongueurs <strong>de</strong> ligne et section <strong>de</strong>s câbles 6.1Caractéristiques techniques (dimensions) 31.03.2005 8Indications pour l'élimination <strong>de</strong>s appareils 10Encombrements 11.2Documents référencés4.211.3tout ledocument1.2 A propos <strong>de</strong> ce documentDestinationCe document s'adresse aux responsables produits et aux collaborateurs <strong>de</strong>s différentsdomaines <strong>de</strong> marchés, chargés <strong>de</strong> l'ingénierie et <strong>de</strong> la mise en service.ObjetIl constitue une base <strong>de</strong> connaissances. Il fournit aux utilisateurs ci-<strong>de</strong>ssus toutes lesinformations nécessaires pour l'ingénierie, le montage, le câblage, la mise en service etla maintenance <strong>de</strong>s servomoteurs linéaires GDB...1... / GLB...1... / GSF…1.Documents <strong>de</strong> référenceDans le chapitre 11.2 «Documents <strong>de</strong> référence», vous trouverez une liste <strong>de</strong>s documentsconcernant les servomoteurs <strong>rotatifs</strong> et linéaires et leurs accessoires.1.3 Contenu du documentCe document contient les caractéristiques techniques <strong>de</strong>s servomoteurs <strong>de</strong> la sérieGDB...1... / GLB...1... / GSF…1 pour :• Comman<strong>de</strong> trois points et• Comman<strong>de</strong> progressiveLes sujets suivants sont traités :• Références <strong>de</strong>s appareils avec options correspondantes• Domaines d'application et fonctions• Exécution <strong>de</strong>s servomoteurs avec les éléments <strong>de</strong> réglage et <strong>de</strong> comman<strong>de</strong>• Contacts auxiliaires réglables et fonction <strong>de</strong> caractéristique• Indications concernant l'ingénierie et consignes et prescriptions <strong>de</strong> sécurité• Indications pour le montage, le câblage et la mise en service• Caractéristiques techniques• Schémas• Indications pour l'élimination <strong>de</strong> ces appareils en respectant les directives pour laprotection <strong>de</strong> l'environnementBuilding Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.20055/36
2 <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong><strong>de</strong> <strong>rappel</strong>IntroductionCe chapitre présente les applications, les fonctions et les combinaisons d'appareils ; ilindique les références et la structure <strong>de</strong> cette famille <strong>de</strong> moteurs, ainsi que ses éléments<strong>de</strong> réglage et <strong>de</strong> comman<strong>de</strong>.2.1 Domaines d'applicationCes servomoteurs <strong>rotatifs</strong> sont utilisés dans <strong>de</strong>s installations <strong>de</strong> ventilation et <strong>de</strong> climatisationpour la comman<strong>de</strong> <strong>de</strong> volets d'air et <strong>de</strong> clapets :• pour surface <strong>de</strong> volets jusqu'à env. 0,8 m 2 (GDB) / 1,5 m 2 (GLB), selon la facilité <strong>de</strong>manœuvre, ou env. 0,3 m² pour GSF...1,• en association avec <strong>de</strong>s régulateurs à comman<strong>de</strong> progressive (0...10 V–) ou <strong>de</strong>srégulateurs trois points (pour la comman<strong>de</strong> <strong>de</strong> volets <strong>rotatifs</strong> et linéaires).2.2 Références et désignationsLe tableau qui suit montre les options relatives aux différents types <strong>de</strong> moteurs <strong>rotatifs</strong> :GDB../GLB.. 131.1E 132.1E 136.1E 331.1E 332.1E 336.1E 161.1E 163.1E 164.1E 166.1EGDB../GLB.. 131.1L 161.1L 163.1LGDB../GLB.. 131.1J 161.1J 163.1JGSF.. 161.1EType <strong>de</strong> comman<strong>de</strong> 3 points à action progressiveAlimentation 24 V~ X X X X X X X X XAlimentation 230 V~ X X XEntrée <strong>de</strong> signal Y0...10 V– X X X0...35 V– avec fonction <strong>de</strong>caractéristique Uo, ∆UX X XIndicateur <strong>de</strong> positionU= 0...10 V–X X X XPot. <strong>de</strong> recopie 1 kΩ X XAuto-adaptation <strong>de</strong> laplage <strong>de</strong> la rotationX X X X X XContacts auxiliaires (2) X X X XSélect. sens <strong>de</strong> rotation X X X X X XAccessoires, pièces <strong>de</strong>rechangePour élargir le fonctionnement <strong>de</strong>s servomoteurs, il existe divers accessoires :Kit <strong>de</strong> conversion rotatif / linéaire pour montage au sol ou muralASK71.6Kit <strong>de</strong> conversion rotatif / linéaire avec levierASK71.5Levier universelASK71.9Pièces diverses / pièces encastrées / leviersASK78.xFiche technique pour accessoires et pièces <strong>de</strong> rechangeN46986/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
Type2.3 Description <strong>de</strong>s fonctionsLe tableau donne une liste <strong>de</strong>s fonctions avec le type <strong>de</strong> comman<strong>de</strong> correspondant :GDB13...1... / GLB13...1...GDB33…1 / GLB33...1GDB16...1... / GLB16...1...GSF16…1Type <strong>de</strong> comman<strong>de</strong> 3 points à comman<strong>de</strong> progressiveSignal <strong>de</strong> comman<strong>de</strong>, avecY = 0...35 V– avecfonction <strong>de</strong> caractéristiquepoint <strong>de</strong> départ Uo = 0...5 V− etréglableplage <strong>de</strong> travail ∆U = 2...30 V−Rotation dans le sens <strong>de</strong>s aiguilles d'une montre ou en sens inverse selon ...... la comman<strong>de</strong>.• la position du commutateur : sens <strong>de</strong>saiguilles d'une montre ou sens inverse• du signal <strong>de</strong> comman<strong>de</strong>Mouvement rotatif, sens <strong>de</strong>En l'absence <strong>de</strong> courant, le servomoteur Le moteur reste dans la position atteinte :rotation :reste dans la position atteinte.• si le signal <strong>de</strong> comman<strong>de</strong> se maintient àune valeur constante• en cas <strong>de</strong> coupure <strong>de</strong> la tension d'alimentationAffichage <strong>de</strong> la position :mécaniqueAffichage <strong>de</strong> l'angle <strong>de</strong> rotation par l'indicateur <strong>de</strong> position.Affichage <strong>de</strong> la position :électriqueContact auxiliaireAuto-adaptation <strong>de</strong> la plage<strong>de</strong> la rotationRéglage manuelDélimitation <strong>de</strong> l'angle <strong>de</strong>rotationEn reliant le potentiomètre <strong>de</strong> recopie àune source <strong>de</strong> tension externe, on peutprélever une tension proportionnelle àl'angle <strong>de</strong> rotation.(*)• Signalisation <strong>de</strong> position : une tension <strong>de</strong>sortie U = 0...10 V–, proportionnelle àl'angle <strong>de</strong> rotation est générée.• Le sens d'action (inversé ou non) <strong>de</strong> latension <strong>de</strong> sortie U dépend <strong>de</strong> la positiondu commutateur <strong>de</strong> sens <strong>de</strong> course DIL.(**)Les points <strong>de</strong> commutation <strong>de</strong>s contacts auxiliaires A et B peuvent être réglés individuellemententre 0 et 90° par pas <strong>de</strong> 5°.(***)• Le servomoteur détermine automatiquementles butées mécaniques <strong>de</strong> fin <strong>de</strong> rotation• La fonction <strong>de</strong> caractéristique (Uo, ∆U)est reproduite sur la plage d'angle <strong>de</strong> rotationdéterminée.En appuyant sur la touche <strong>de</strong> débrayage, on peut effectuer un réglage manuel du moteur.L’angle <strong>de</strong> rotation maximal peut être réglé entre 0° et 90° par pas <strong>de</strong> 2° à l'ai<strong>de</strong> d'unevis <strong>de</strong> réglage.(*) Pas d'affichage <strong>de</strong> la position, électrique, pour les GDB / GLB13...1J et GDB / GLB13...1L(**) Pas d'affichage <strong>de</strong> la position, électrique, pour les GDB / GLB16...1J(***) Pas <strong>de</strong> fonction <strong>de</strong> contact auxiliaire avec les GDB / GLB13...1J, GDB / GLB13...1L, GDB / GLB16...1J etGDB / GLB16...1LBuilding Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.20057/36
2.3.1 Description complémentaire <strong>de</strong>s fonctions pour les moteursà action progressiveFonction <strong>de</strong> caractéristique(GDB / GLB163.1,GDB / GLB164.1)Le point <strong>de</strong> départ Uo et la plage <strong>de</strong> travail ∆U peuvent être configurés au moyen <strong>de</strong><strong>de</strong>ux potentiomètres (voir «Technique»). Les servomoteurs disposant <strong>de</strong> ces fonctionspeuvent être utilisés pour les applications suivantes :• Possibilité <strong>de</strong> comman<strong>de</strong> <strong>de</strong> volets avec limitation d'angle <strong>de</strong> rotation par exempledans une plage <strong>de</strong> 0...45° pour la totalité <strong>de</strong> la plage du signal <strong>de</strong> comman<strong>de</strong>0...10 V– (plage <strong>de</strong> point <strong>de</strong> démarrage Uo et plage <strong>de</strong> travail effective ∆Uw) (avecou <strong>sans</strong> auto-adaptation).• Organe <strong>de</strong> réglage séquentiel dans <strong>de</strong>s boucles <strong>de</strong> réglage disposant uniquementd'un signal <strong>de</strong> comman<strong>de</strong> <strong>de</strong> 0...10 V– pour la comman<strong>de</strong> <strong>de</strong> plusieurs séquences.• Pour les systèmes <strong>de</strong> régulation avec un signal <strong>de</strong> comman<strong>de</strong> dérivé du 0...10 V–,par exemple 2...10 V–.Auto-adaptation <strong>de</strong> laplage <strong>de</strong> la course <strong>de</strong>rotation(GDB / GLB / GSF16…1)Le servomoteur détermine automatiquement les butées mécaniques <strong>de</strong> fin <strong>de</strong> course<strong>de</strong> rotation si l'auto-adaptation est activée et si l'appareil est sous tension.L'auto-adaptation est désactivée puis activée à nouveau alors que l'appareil est soustension.Le tableau indique les différents effets <strong>de</strong> la reproduction <strong>de</strong> la fonction <strong>de</strong> caractéristiquesur la plage <strong>de</strong> rotation selon que l'auto-adaptation est activée ou non (cf. aussichapitre «Fonction <strong>de</strong> caractéristique réglable»).Auto-adaptation non activée• Le servomoteur reproduit la fonction<strong>de</strong> caractéristique (Uo, ∆U) sur laplage <strong>de</strong> réglage Ys = 100 % pourl'angle <strong>de</strong> rotation 90°.• Le servomoteur calibre l'affichage <strong>de</strong>position avec U = 0...10 V– pour l'angle<strong>de</strong> rotation 90°.Auto-adaptation activée• Le servomoteur reproduit la fonction <strong>de</strong>caractéristique (Uo, ∆U) sur la plage <strong>de</strong>réglage Ys = 100 % pour la plage <strong>de</strong> rotationdéterminée.• Le servomoteur calibre l'affichage <strong>de</strong>position avec U = 0...10 V– pour l'angle<strong>de</strong> rotation 90°.L'électronique calibre le signal <strong>de</strong> comman<strong>de</strong> selon la plage <strong>de</strong> rotation réglée pour les– GDB / GLB161.1..., GDB / GLB166.1E et GSF16…1 avec 0...10 V−– GDB / GLB163.1... et GDB / GLB164.1E avec les valeurs choisies pour le point <strong>de</strong>départ Uo et la plage <strong>de</strong> travail ∆U (voir sous «Technique»).Remarque :La tension <strong>de</strong> sortie pour l'affichage <strong>de</strong> position n'est pas influencée, c'est-à-dire que laplage <strong>de</strong> travail complète <strong>de</strong> 100 % (angle <strong>de</strong> rotation nominal = 90°) correspond à0...10 V−.2.4 Appareils <strong>de</strong> régulation et <strong>de</strong> comman<strong>de</strong>Les servomoteurs peuvent être raccordés à tout appareil <strong>de</strong> réglage et d'automatismeprésentant les sorties suivantes. Respecter les conditions <strong>de</strong> sécurité requises.Type <strong>de</strong> servomoteur Type <strong>de</strong> comman<strong>de</strong> Sortie du régulateurGDB13...1 / GLB13...1 3 points 24 V~GDB33...1 / GLB33...1 3 points 230 V~GDB16...1 / GLB16...1 /GSF16…1action progressive 0...10 V– / 0...35 V–8/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
2.5 Construction et exécutionDescription succincteBoîtierTrain d'engrenagesFixation d'axeRéglage manuelRéglette anti-torsionPièce <strong>de</strong> centrageRaccor<strong>de</strong>ment électriqueLes servomoteurs <strong>rotatifs</strong> GDB...1... et GLB...1... existent pour les comman<strong>de</strong>s troispoints et progressives. Le couple <strong>de</strong> rotation maximal est <strong>de</strong> 5 Nm (GDB) ou 10 Nm(GLB). Le servomoteur est précâblé.Les servomoteurs <strong>rotatifs</strong> GSF...1 sont prévus pour une comman<strong>de</strong> progressive. Lecouple <strong>de</strong> rotation maximal est <strong>de</strong> 2 Nm. Le servomoteur est précâblé.Boîtier en matière plastique robuste et léger. Il garantit une durée <strong>de</strong> vie élevée <strong>de</strong>l'appareil même sous les conditions les plus exigeantes.Train d'engrenages <strong>sans</strong> entretien et silencieux, protégé contre les surcharges et lesblocages même en fonctionnement prolongé.Le manchon d'accouplement est en acier fritté arrêt trempé. La vis qui y est intégréeavec un six pans intérieur (4 mm) permet <strong>de</strong> fixer le servomoteur sur <strong>de</strong>s axes avecsections (carré, rond) et diamètres différents.Dans l'état hors tension, le moteur ou le volet d'air peut être réglé manuellement enappuyant sur la touche <strong>de</strong> débrayage rouge.Une réglette perforée munie d'un boulon permet <strong>de</strong> fixer le servomoteur.Elle sert à• assurer une adhérence par force entre l'axe <strong>de</strong> registre avec un petit diamètre(8…10 mm) et le manchon d'accouplement,• réduire <strong>de</strong>s mouvements longitudinaux du servomoteur dus à <strong>de</strong>s mouvements excentriques.Les moteurs sont livrés avec un câble <strong>de</strong> raccor<strong>de</strong>ment monté <strong>de</strong> 0,9 m.Eléments spécifiques<strong>de</strong>s typesContact auxiliairePotentiomètre pour point<strong>de</strong> départ / plage <strong>de</strong> travailCommutateurs DILPotentiomètre <strong>de</strong> recopiepour affichage <strong>de</strong> positionCache pour commutateursDIL (seulement pourGDB / GLB / GSF16...1)Les servomoteurs sont livrés sous forme <strong>de</strong> variantes spécifiques avec les élémentssuivants :Deux contacts auxiliaires A et B situés en faça<strong>de</strong> du moteur permettent <strong>de</strong> régler lesfonctions supplémentaires.Les <strong>de</strong>ux potentiomètres pour les fonctions <strong>de</strong> caractéristique Uo et ∆U sont accessiblesen faça<strong>de</strong> <strong>de</strong> l'appareil.Les trois commutateurs DIL servent– à la sélection <strong>de</strong> l'auto-adaptation <strong>de</strong> la plage <strong>de</strong> la rotation,– au réglage du sens <strong>de</strong> rotation,– à la sélection du sens <strong>de</strong> rotation entre caractéristique <strong>de</strong> la tension <strong>de</strong> sortie inverséeet non inversée pour l'affichage <strong>de</strong> position.Le potentiomètre est incorporé et peut être raccordé via un câble.Il sert à protéger les commutateurs DIL <strong>de</strong> la poussière et <strong>de</strong>s projections d'eau.Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.20059/36
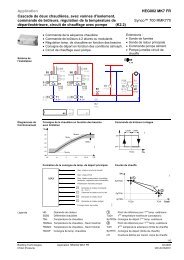
2.6 Eléments <strong>de</strong> réglage et <strong>de</strong> comman<strong>de</strong>Servomoteur1234self adapt090°YsUo U VU2 101630 24Uo0 1235 4self adapt045°5 690°A ° B10 2080 70 60 50Aux SwitchAdjustment7 816151412,13111094634Z11171 Plaque <strong>de</strong> base et boîtier2 Echelles d'angles <strong>de</strong> rotation 0°...90° /90°...0°3 Potentiomètre <strong>de</strong> réglage <strong>de</strong> la plage<strong>de</strong> travail ∆U4 Potentiomètre <strong>de</strong> réglage <strong>de</strong> la plagedu point <strong>de</strong> départ Uo5 Commutateurs DIL pour- auto-adaptation- sens <strong>de</strong> rotation- caractéristique <strong>de</strong> tension <strong>de</strong> sortieinversée ou non inversée6 Cache pour commutateurs DIL7 Câble d’alimentation et pour affichage<strong>de</strong> la position8 Câble <strong>de</strong> raccor<strong>de</strong>ment <strong>de</strong>s contactsauxiliaires9 Poussoir pour débrayage <strong>de</strong>l'engrenage10 Manchon d'accouplement11 Pièce <strong>de</strong> centrage (diamètre d'axe8...10 mm)12,13 Axes <strong>de</strong> réglage <strong>de</strong>s contactsauxiliaires A et B14 Indicateur <strong>de</strong> position15 Levier <strong>de</strong> réglage avec vis <strong>de</strong> fixationd'axe16 Vis <strong>de</strong> réglage pour limitation <strong>de</strong> l'angle<strong>de</strong> rotation17 Réglette anti-torsion18 Bornier <strong>de</strong> raccor<strong>de</strong>ment pour câbles<strong>de</strong> 2,5 mm² max. (Lumberg KRES03)19 Connecteur MTA100/640456-618 19Configuration <strong>de</strong>s commutateursDILCommutateur DIL 1 :Auto-adaptationLes fonctions suivantes peuvent être réglées et doivent être vérifiées :self adapt04634 Z15L'auto-adaptation peut être activée/désactivée. Description <strong>de</strong> cette fonction,voir chapitre «Technique».Réglage d'usine : Auto-adaptation désactivée (0)Commutateur DIL 2 :Sens <strong>de</strong> rotationself adapt04634 Z16Le sens <strong>de</strong> rotation réglé doit correspondre au sens <strong>de</strong> rotation désirépour le volet (sens <strong>de</strong>s aiguilles d'une montre ou sens inverse).Réglage d'usine : Sens <strong>de</strong>s aiguilles d'une montre ( )Commutateur DIL 3 :Caractéristique <strong>de</strong> latension <strong>de</strong> sortie pourl'affichage <strong>de</strong> la positionOn peut sélectionner le sens d'action <strong>de</strong> la tension <strong>de</strong> sortie U pour l'affichage <strong>de</strong> positionélectrique indépendamment du sens <strong>de</strong> rotation. Les possibilités sont :Sens <strong>de</strong> rotation 0…90° Position du commutateur DIL Tension <strong>de</strong> sortie Unon inversée 0...10 V–inversée 10...0 V–non inversée 0...10 V–inversée 10...0 V–Réglage d'usineself adapt04634 Z17Caractéristique non inversée ( )Y S = 0…100% (0°…90°)U = 0...10 V–10/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
3 TechniqueCe chapitre traite <strong>de</strong>s thèmes suivants :• Moteur• Contacts auxiliaires réglables• Fonction <strong>de</strong> caractéristique réglable (signal <strong>de</strong> comman<strong>de</strong> 0...35 V–)• Caractéristique <strong>de</strong> régulation compte tenu <strong>de</strong> la zone neutre3.1 MoteurMoteur synchrone offrant un réglage précis <strong>de</strong> la vitesse. L'accouplement magnétiquepermettant la surveillance du couple protège le moteur et les registres.3.2 Plage <strong>de</strong> rotation et limitation mécaniqueLe graphique suivant montre le rapport entre les limitations mécaniques internes etexternes <strong>de</strong> la plage <strong>de</strong> rotation.Plage <strong>de</strong> rotation <strong>de</strong> l'engrenageButées internes0° 95°-2,5°97.5°Butées externesPlage <strong>de</strong> rotation du servomoteur(<strong>sans</strong> limitation <strong>de</strong> l'angle<strong>de</strong> rotation) Pré-réglage <strong>de</strong> l'engrenage(réglage d'usine)0° 5° 20° 40° 60° 80° 95°1PointeurEchelle <strong>de</strong>s angles <strong>de</strong> rotation0°2,5°90°4634D0311/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
3.3 Contacts auxiliaires et signaux <strong>de</strong> comman<strong>de</strong>La figure suivante montre le rapport entre les points <strong>de</strong> commutation réglables <strong>de</strong>scontacts auxiliaires A et B, l'angle <strong>de</strong> rotation et le signal <strong>de</strong> comman<strong>de</strong>.0° 95°Plage <strong>de</strong> rotation <strong>de</strong> l'engrenageContacts auxiliairesréglage usine : A=5°; B=85°plage <strong>de</strong> réglage : 5°…90°ABA ° B10 205°5°⇒ 1 x click85°Etats <strong>de</strong> commutationS1 S1 S4 S4(Q11)(Q11)(Q21)(Q21)(Q12)(Q14)(Q12)(Q14)(Q22)(Q24)(Q22)(Q24)S2 S3 S2 S3 S5 S6 S5 S680 70 60 50Réglages ducontact auxiliaireRotation en fonction du signal<strong>de</strong> comman<strong>de</strong>Signal <strong>de</strong> comman<strong>de</strong> progressif,10 V–, 24 V~ reste en position(G,GO,Y=U) s'ouvre (G,G0,Y>U) se ferme (G,G0,Y
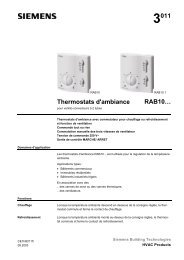
3.4 Fonction <strong>de</strong> caractéristique réglable<strong>Servomoteurs</strong>GDB / GLB163.1,GDB / GLB164.1L'appareil est commandé par le signal <strong>de</strong> comman<strong>de</strong> progressif 0...35 V– d'un régulateur.L’angle <strong>de</strong> rotation est proportionnel à ce signal. Le potentiomètre "Uo" permet <strong>de</strong>définir le point <strong>de</strong> départ entre 0...5 V– et, avec le potentiomètre "∆U" on règle la plage<strong>de</strong> travail entre 2...30 V−.Caractéristique réglable(selon modèle)Ys [%]1001)4)4634Z12YsUoUV02 5 10 30 35 Y [V]∆UwU O∆U (max. 30 V)3)2)4634D01U2 101630 24Uo0 12Ys Plage <strong>de</strong> réglage (100 % = angle <strong>de</strong> rotation 90°)Y Signal <strong>de</strong> comman<strong>de</strong>Uo Plage du point <strong>de</strong> départ∆U Plage <strong>de</strong> travail pour Ys = 100 %(plage <strong>de</strong> travail virtuelle, si Y > 10 V)∆Uw Plage <strong>de</strong> travail active = 10 V − Uo543Exemples selonPoint <strong>de</strong> départ Plage <strong>de</strong> travail ∆U Plage <strong>de</strong> réglagediagrammeUo réglé réglée activeYs1) Plage <strong>de</strong> travail min. 0 V– 2 V– 2 V– 100 % / 90°2) Angle <strong>de</strong> rotation min. 5 V– 30 V– 5 V– 16,7 % / 15°3) Angle <strong>de</strong> rotation min. 0 V– 30 V– 10 V– 33,3 % / 30°4) Réglage d'usine 0 V– 10 V– 10 V– 100 % / 90°Remarque :• L'entrée Y est limitée à 10 V– maximum, c'est-à-dire que les signaux > 10 V– sontécrêtés.• La plage <strong>de</strong> travail réglable ∆U est <strong>de</strong> 30 V maximum.• La plage <strong>de</strong> travail effective ∆Uw = 10 V − Uo se situe entre 0 V et 10 VExempleFormule <strong>de</strong> calculRéglages <strong>de</strong>s potentiomètresCaractéristique pourl'exempleOn cherche la plage <strong>de</strong> travail à régler ∆U, si le servomoteur doit s'ouvrir <strong>de</strong> 0...50 %(0…45°). Le point <strong>de</strong> départ Uo est 2 V.Calcul <strong>de</strong> la valeur <strong>de</strong> réglage pour ∆U :∆ U=Plage <strong>de</strong> réglage max Ys maxPlage <strong>de</strong> réglageUo = 2 V, ∆U = 16 VY S[%]100<strong>de</strong> travail Ys[%][%]⋅100 %( 10 [ V] − Uo[ V]) = ⋅ ( 10 V −2 V) = 16 V50 %504634D020Uo2 10 18∆Uw (8 V)∆U (16 V)Y [V]Plage <strong>de</strong> réglage max. Ysmax = 100 % (90°)Plage <strong>de</strong> réglage <strong>de</strong> travail Ys = 50 % (45,5°)Plage <strong>de</strong> travail virtuelle ∆U = 16 VPlage <strong>de</strong> travail active ∆Uw = 8 V13/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
3.5 Zone neutre<strong>Servomoteurs</strong>GDB16..1.. / GLB16..1.. /GSF16..1 (0...10 V–)Remarque :Pour les servomoteurs à action progressive, il faut tenir compte <strong>de</strong> la caractéristique <strong>de</strong>régulation pour le point <strong>de</strong> réglage <strong>de</strong> consigne choisi. Le schéma représente la caractéristique<strong>de</strong> réglage compte tenu <strong>de</strong> la zone neutre pour la plage 0...10 V–.Le schéma représente la caractéristique <strong>de</strong> réglage compte tenu <strong>de</strong> la zone neutre.Les valeurs indiquées sur le graphique pour la zone neutre sont valables pour la plage0...10 V– (<strong>sans</strong> fonction <strong>de</strong> caractéristique).-ESens <strong>de</strong> rotation90° 0°sens antihoraire -EHystérésisH = 70 mV0° 90°Sens horaireHystérésisH = 70 mV+EZone neutre NZ = 200 mV4614D03ffrLe schéma indique le rapport entre la tension différentielle E = Y – U (différence entrevaleur <strong>de</strong> consigne Y et valeur effective U) et le sens <strong>de</strong> rotation, compte tenu <strong>de</strong> l'hystérésiset <strong>de</strong> la zone neutre.<strong>Servomoteurs</strong>GDB163.1... / GLB163.1...GDB164.1... / GLB164.1...(0...35 V−)Pour la plage 0...35 V− (avec fonction <strong>de</strong> caractéristique) nous avons pourla zone neutre NZ = 2 % <strong>de</strong> la plage <strong>de</strong> travail ∆Ul'hystérésis H = 0,7 % <strong>de</strong> la plage <strong>de</strong> travail ∆U14/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
4 Indications pour l'ingénierieIntroductionConformité <strong>de</strong> l'utilisationLes manuels <strong>de</strong>s systèmes utilisés contiennent <strong>de</strong>s indications importantes pour l'ingénierie.Il est conseillé <strong>de</strong> les consulter avant <strong>de</strong> poursuivre la lecture <strong>de</strong>s paragraphessuivants et <strong>de</strong> porter une attention particulière aux indications concernant la sécurité.Les servomoteurs ne doivent être utilisés dans le système que pour les applicationstelles que précisées dans la documentation relative aux principes <strong>de</strong> base <strong>de</strong> ce système.Il faut par ailleurs tenir compte <strong>de</strong>s particularités et prescriptions spécifiques àchaque servomoteur, telles qu'elles sont indiquées dans ce chapitre et au chapitre 8«Caractéristiques techniques» du présent document.4.1 Remarques concernant la sécuritéA respecterimpérativementIndications concernantla sécuritéConsignes généralesSécuritéTBTS, TBTPMise à la terre <strong>de</strong> G0(zéro du système)Recommandation pour lamise à la terre <strong>de</strong> G0Ce chapitre traite <strong>de</strong>s prescriptions générales et <strong>de</strong>s consignes relatives à la tensionsecteur et à l'alimentation. Il contient <strong>de</strong>s informations importantes pour votre sécuritéet celle <strong>de</strong> l'installation entière.Dans ce document, le triangle <strong>de</strong> mise en gar<strong>de</strong> ci-contre signifie que les prescriptionset indications correspondantes doivent être impérativement respectées. Sinon la sécurité<strong>de</strong>s personnes et <strong>de</strong>s biens n'est pas assurée.Lors <strong>de</strong> l'étu<strong>de</strong> et l'exécution du projet, il convient <strong>de</strong> respecter :• les réglementations relatives aux installations électriques et aux courants forts envigueur dans le pays concerné,• les autres normes nationales <strong>de</strong> sécurité,• les prescriptions relatives aux installations électriques dans le pays concerné,• les prescriptions du fournisseur d'énergie électrique,• les schémas, listes <strong>de</strong> câbles, plans d'ensemble, spécifications et conventions duclient ou du bureau d'étu<strong>de</strong>s mandaté,• les prescriptions <strong>de</strong> tiers, par ex. les directives du maître d'oeuvre, etc.La sécurité électrique dans les systèmes <strong>de</strong> gestion <strong>de</strong> bâtiment <strong>de</strong> <strong>Siemens</strong> / HVACProducts est basée essentiellement sur l'utilisation <strong>de</strong> la très basse tension avecséparation sécurisée par rapport à la tension secteur.Selon que la très basse tension est mise à la terre ou non, on obtient une applicationconforme en matière <strong>de</strong> TBTS (très basse tension <strong>de</strong> sécurité) ou TBTP (très bassetension <strong>de</strong> protection) selon HD 384 "Installations électriques dans les bâtiments" :<strong>sans</strong> mise à la terre = TBTS ou, en anglais, SELV = Safety Extra Low Voltageavec mise à la terre = TBTP ou, en anglais, PELV = Protection by Extra Low VoltageEn ce qui concerne la mise à la terre <strong>de</strong> G0, les points suivants doivent être respectés :• le G0 du 24 V~ peut être mis à la terre ou non. A ce sujet, prendre en compte lesprescriptions et habitu<strong>de</strong>s locales.• une mise à la terre peut être nécessaire ou non admise pour raisons fonctionnelles.• En général, il est conseillé <strong>de</strong> mettre à la terre les systèmes 24 V~, si cela n'estpas en contradiction avec les prescriptions du constructeur.• Pour éviter <strong>de</strong>s circuits <strong>de</strong> retour par la terre, les systèmes avec TBTP ne peuventêtre reliés à la terre qu'en un seul point ; à défaut d'autres indications, ceci se faitle plus souvent sur le transformateur.Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.200515/36
Tension d'alimentation24 V~, 230 V~Les consignes suivantes sont à respecter pour ces tensions d'alimentation :PrescriptionTension d'alimentation24 V~Tension d'alimentation230 V~Spécification pourles transformateurs24 V~Maintien <strong>de</strong> latension d'alimentation24 V~Maintien <strong>de</strong> latension secteur230 V~Cette tension doit répondre aux exigences pour la très bassetension <strong>de</strong> sécurité (TBTS) ou <strong>de</strong> protection (TBTP) :• Ecart admissible <strong>de</strong> la tension nominale 24 V~ sur les servomoteurs: +/– 20 %• Ecart admissible <strong>de</strong> la tension nominale 230 V~ sur les servomoteurs: +/– 10 %• Utilisation <strong>de</strong> transformateurs <strong>de</strong> sécurité selon EN 61558, àdouble isolement, calculé pour 100 % <strong>de</strong> durée <strong>de</strong> fonctionnement,pour l'alimentation <strong>de</strong> circuits en TBTS ou en TBTP.• Pour déterminer la puissance du transformateur, additionnerla consommation en VA <strong>de</strong> tous les servomoteurs utilisés.• La puissance prélevée au transformateur ne <strong>de</strong>vrait pasdépasser 50 % <strong>de</strong> la charge nominale pour <strong>de</strong>s raisons <strong>de</strong>ren<strong>de</strong>ment.• La puissance nominale du transformateur doit être au minimum25 VA. Avec <strong>de</strong>s transformateurs <strong>de</strong> plus faible puissance,le rapport entre tension <strong>de</strong> marche à vi<strong>de</strong> et tension àpleine charge est plus défavorable. (> + 20 %).• Transformateurs côté secondaire :• Selon la charge effective <strong>de</strong> tous les appareils raccordés :• Un fusible doit toujours être monté pour G (potentiel du système).• Si cela fait l'objet d'une prescription, il faut un fusible <strong>de</strong> plussur la liaison G0 (zéro du système).• Transformateurs côté primaire selon les prescriptions relativesaux installations électriques <strong>de</strong>s bâtiments dans le paysconcerné4.2 Prescriptions spécifiques aux appareilsSécurité <strong>de</strong>s appareilsla sécurité <strong>de</strong>s appareils est entre autres assurée par• l'alimentation en très basse tension 24 V~ selon TBTS ou TBTP,• Isolation double entre la tension secteur 230 V~ et les circuits TBTS / TBTP.Contacts auxiliairesA, BSur les sorties <strong>de</strong> comman<strong>de</strong> <strong>de</strong>s contacts auxiliaires A et B, on doit appliquer exclusivementsoit une tension secteur, soit une très basse tension <strong>de</strong> sécurité. Il estinterdit <strong>de</strong> combiner ces <strong>de</strong>ux types d'alimentation. Le fonctionnement avec <strong>de</strong>s phasesdifférentes n'est pas autorisé.Potentiomètre <strong>de</strong> recopieRaccor<strong>de</strong>ment électrique<strong>de</strong> moteurs en parallèlePour le circuit externe d'affichage <strong>de</strong> la position <strong>de</strong>s volets, respecter les caractéristiquesélectriques du potentiomètre.Il est possible <strong>de</strong> raccor<strong>de</strong>r en parallèle jusqu'à 10 servomoteurs <strong>de</strong> même type, mais ilfaut pour cela tenir compte <strong>de</strong>s longueurs <strong>de</strong> ligne et <strong>de</strong>s sections <strong>de</strong>s câbles.Pour plus d'informations, voir chapitre 6 «Indications pour le câblage».Mise en gar<strong>de</strong>,maintenanceIl est interdit d'ouvrir le servomoteur.L'appareil n'exige aucun entretien. Les travaux d'entretien ne peuvent être effectuésque par le constructeur.16/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
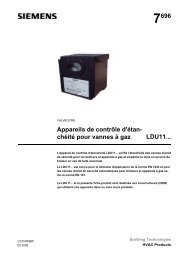
4.3 Indications concernant l'optimisation dupoint <strong>de</strong> vue <strong>de</strong> la CEMPose <strong>de</strong>s câbles dans uneseule gaineTypes <strong>de</strong> câbleSéparation <strong>de</strong>s câblesCâbles non blindésSéparer les câble fortement émetteurs <strong>de</strong>s probables "victimes" <strong>de</strong> ces émissions.• Câbles perturbateurs : câbles <strong>de</strong> moteur, en particulier moteurs alimentés par <strong>de</strong>sconvertisseurs, câbles <strong>de</strong> puissance.• "Victimes" possibles : câbles <strong>de</strong> comman<strong>de</strong>, câbles basse tension, câbles d'interface,câbles <strong>de</strong> réseau local, câbles <strong>de</strong> signaux numériques et analogiques.• Les <strong>de</strong>ux types <strong>de</strong> câble peuvent être posés dans la même gaine <strong>de</strong> câble, maisdans <strong>de</strong>s compartiments séparés.• Si l'on ne dispose pas d'une gaine fermée sur trois côtés avec paroi <strong>de</strong> séparation,les câbles perturbateurs doivent être séparés <strong>de</strong>s autres par une distance minimale<strong>de</strong> 150 mm ou posés dans <strong>de</strong>s gaines séparées.• Les croisements <strong>de</strong> câbles fortement émetteurs avec leurs "victimes" éventuellesdoivent se faire à angle droit.• Si, exceptionnellement, les câbles <strong>de</strong> signalisation et les câbles <strong>de</strong> puissance émetteurssont posés parallèlement, le risque d'interférence est grand. Il faut dans ce caslimiter la longueur du câble <strong>de</strong> signalisation 0...10 V− pour les servomoteurs à actionprogressive.Nous conseillons en général d'utiliser <strong>de</strong>s câbles non blindés. Pour le choix <strong>de</strong> câblesnon blindés, il faut suivre les conseils d'installation du constructeur. En général, lescâbles non blindés torsadés par paires ont <strong>de</strong>s caractéristiques CEM suffisantespour les applications <strong>de</strong> gestion technique <strong>de</strong> bâtiment (y compris pour les données).Ils présentent en outre l'avantage qu'aucun couplage avec la terre environnante n'est àprendre en compte.4.4 Détermination du type <strong>de</strong> servomoteurCouple <strong>de</strong> rotationrequisLe choix du servomoteur dépend <strong>de</strong> plusieurs facteurs liés au couple. Le couple totalnécessaire pour actionner le volet d'air peut être calculé en multipliant la valeur ducouple nominal Nm/m 2 et la surface du volet (indiqués par le constructeur) :Couple total [Nm] = Couple nominal [Nm/m 2 ] × surface du volet [m 2 ]Au lieu d'utiliser le couple nominal, on peut aussi déterminer le couple total à partir <strong>de</strong>sdiagrammes <strong>de</strong> dimensionnement <strong>de</strong>s constructeurs <strong>de</strong> volets.Diagramme <strong>de</strong> dimensionnementLe diagramme suivant (exemple EMCO) permet <strong>de</strong> déterminer le couple total pourcette marque <strong>de</strong> volet d'air.Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.200517/36
Coupel <strong>de</strong> friction <strong>de</strong> rotation t <strong>sans</strong> influence <strong>de</strong> lair) [Nm]1098765199516651335100543210200 400 600 800 1000 1200 1400 1600 1800 2000Hauteur du registre H [mm]675375Largeur du registre B [mm]010002000Pression totale [P]4621D01fr160010 20120010 205 10 158004005 10 15Couple <strong>de</strong> rotation total [Nm]Largeur <strong>de</strong> registre B [mm]ExempleVolets à lamelles :largeur = 1200 mmhauteur = 1005 mmpression totale = 2000 PaLe diagramme indique un couple total d'environ 10 Nm.Détermination du type<strong>de</strong> moteurLe type <strong>de</strong> servomoteur nécessaire peut être déterminé comme suit :Si leCouple <strong>de</strong> rotation total1SF[ Nm]estutilisez le type≤ 15 Nm GEB...1 (15 Nm) 2≤ 25 Nm GBB...1 (25 Nm) 3≤ 30 Nm 2 x GEB...1 (2 x 15 Nm) 4≤ 35 Nm GIB...1 (35 Nm) 5≤ 70 Nm 2 x GIB...1 (2 x 35 Nm) 6Remarques :1Facteur <strong>de</strong> sécurité SF: Lors du calcul du nombre <strong>de</strong> servomoteurs, il faut tenircompte <strong>de</strong> variables non quantifiables telles qu’un léger décentrage, l’âge <strong>de</strong>s volets,etc. Nous conseillons d’adopter un facteur <strong>de</strong> sécurité <strong>de</strong> 0,8. Il faut choisir lemême facteur pour le calcul du couple moteur avec la valeur du couple nominal.Si le couple moteur effectivement nécessaire est supérieur à 10 Nm, on peut utiliser2un servomoteur <strong>de</strong> la série GEB...1 ou3un servomoteur <strong>de</strong> la série GBB...1 ou4<strong>de</strong>ux servomoteurs <strong>rotatifs</strong> (Powerpack) <strong>de</strong> la série GEB13...1, GEB33...1 ou5un servomoteur <strong>de</strong> la série GIB...1.6En cas <strong>de</strong> couple moteur supérieur à 30 Nm, on peut assembler mécaniquementsur l'axe du volet <strong>de</strong>ux servomoteurs <strong>de</strong> la série GIB...1. (voir fiches produit N4621,N4626, N4656 et N4698).18/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
5 Indications pour le montageInstructions <strong>de</strong> montagePosition <strong>de</strong> montageLa notice <strong>de</strong> montage 4 319 2883 0 (M4634) ou 74 319 0394 0 (M4628), jointe au moteur,fournit toutes les informations et les étapes pour préparer et effectuer correctementle montage.Choisir un emplacement <strong>de</strong> montage permettant l'accès aisé aux éléments <strong>de</strong> réglagesitués sur le couvercle, aux connecteurs ou au bornier et aux câbles (voir chap. 11.1 et11.2 «Encombrements»).Protection <strong>de</strong> l'appareil• GDB / GLB / GSF...1• GDB / GLB...1J et GDB / GLB...1L<strong>de</strong>gré <strong>de</strong> protection IP54<strong>de</strong>gré <strong>de</strong> protection IP20Réglette anti-torsionPréréglage duservomoteurRéglage manuelLimitation mécanique <strong>de</strong>l’angle <strong>de</strong> rotationAxes <strong>de</strong>s voletsUtilisation <strong>de</strong>s kits <strong>de</strong>conversion rotatif / linéaireLa réglette anti-torsion (voir «Encombrements») est nécessaire pour le montage surl'axe du volet. Dans ce cas, il faut que la tige dispose <strong>de</strong> suffisamment <strong>de</strong> prise dans leboîtier.Le servomoteur est positionné en usine avec un angle <strong>de</strong> + 2,5°, afin d'assurer unepression satisfaisante sur les volets.En appuyant sur la touche <strong>de</strong> débrayage, on peut effectuer un réglage manuel du moteur.On peut au besoin limiter l’angle <strong>de</strong> rotation <strong>de</strong> l’axe sur toute la a plage, par pas <strong>de</strong> 2°,en modifiant la position <strong>de</strong> la vis <strong>de</strong> réglage.Pour <strong>de</strong>s informations sur la longueur minimale et le diamètre <strong>de</strong>s axes <strong>de</strong> volets, voirle chapitre 8 «Caractéristiques techniques».Pour la conversion du mouvement rotatif en mouvement linéaire, se référer au chapitre2.2 «Références et désignations». Les kits <strong>de</strong> conversion sont montés selon <strong>de</strong>s instructions<strong>de</strong> montage séparées.Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.200519/36
6 Indications pour le câblageAvant <strong>de</strong> commencer le câblage, consultez les chapitres suivants :• «Remarques sur la sécurité», chapitre 4.1• «Prescriptions spécifiques aux appareils», chapitre 4.2• «Indications concernant l'optimisation du point <strong>de</strong> vue <strong>de</strong> la CEM», chapitre 4.3• «Schémas», chapitre 9, ainsi que le• Schéma <strong>de</strong> l'installation <strong>de</strong> CVC6.1 Longueurs <strong>de</strong> ligne et section <strong>de</strong>s câblesLes longueurs <strong>de</strong> ligne admissibles et les sections <strong>de</strong>s câbles dépen<strong>de</strong>nt <strong>de</strong> laconsommation <strong>de</strong>s servomoteurs et <strong>de</strong> la chute <strong>de</strong> tension admissible <strong>de</strong>s lignes <strong>de</strong>connexion vers les servomoteurs. Les longueurs <strong>de</strong> ligne peuvent être déterminées àpartir du graphique suivant ou à l'ai<strong>de</strong> <strong>de</strong>s formules indiquées.Remarque :Chute <strong>de</strong> tensionadmissiblePour la détermination <strong>de</strong> la longueur <strong>de</strong> ligne et <strong>de</strong> la section, il faut non seulementtenir compte <strong>de</strong> la chute <strong>de</strong> tension admissible <strong>de</strong>s lignes d'alimentation et <strong>de</strong> signalisation(voir tableau ci-<strong>de</strong>ssous), mais aussi respecter la tolérance admissible <strong>de</strong> la tensiond'alimentation du moteur (voir chapitre 8 «Caractéristiques techniques»).Le dimensionnement <strong>de</strong>s lignes entre le potentiomètre <strong>de</strong> position et les servomoteursdépend du type <strong>de</strong> moteur utilisé et s'effectue sur la base suivante :Type <strong>de</strong>servomoteurTensiond'alimentationConducteursChute <strong>de</strong> tension max.admissibleGDB / GLB13...1... 24 V~ G, Y1, Y2 4 % chacun (total 8 %)GDB / GLB16...1... /GSF16…124 V~G0, GG0, Y, U4 % chacun (total 8 %)1 % chacun (pour 0...10 V−)GDB / GLB33...1 230 V~ L, N 2 % chacun (total 4 %)Remarques concernantle conducteur G0(GDB / GLB16...1... /GSF16…1)Tenir compte <strong>de</strong>s critères suivants :• En cas <strong>de</strong> comman<strong>de</strong> progressive, l'erreur admissible du signal <strong>de</strong> comman<strong>de</strong>, dueà la chute <strong>de</strong> tension sur le conducteur G0, ne doit pas dépasser 1 %.• La chute <strong>de</strong> tension du conducteur G0, engendrée par les pointes <strong>de</strong> courant <strong>de</strong>charge du circuit redresseur du servomoteur, peut atteindre 2 Vcc max.• Les variations <strong>de</strong> charge du servomoteur peuvent provoquer <strong>de</strong>s auto-oscillations encas <strong>de</strong> dimensionnement incorrect du conducteur G0, par suite <strong>de</strong> la variation <strong>de</strong> lachute <strong>de</strong> tension continue.• La perte <strong>de</strong> tension d'alimentation pour 24 V~ ne doit pas dépasser 8 % (4 % sur leconducteur G0).• La chute <strong>de</strong> tension continue sur la ligne G0 est causée par :− <strong>de</strong>s dissymétries dans la tension interne du moteur (8 mA- env.)− le courant du signal <strong>de</strong> comman<strong>de</strong> 0,1 mA– (à partir <strong>de</strong> Y = 0...10 V–) et− le courant du signal <strong>de</strong> sortie 1 mA– (à partir <strong>de</strong> U = 0...10 V–).• Elle peut être négligée pour les observations suivantes.Diagramme L/Ppour 24 V~Ce diagramme est valable pour les tensions d'alimentation <strong>de</strong> 24 V~ et indique la longueur<strong>de</strong> ligne admissible L en fonction <strong>de</strong> la puissance P et les sections <strong>de</strong> ligne entant que paramètres.20/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
L [m]3004626D01<strong>de</strong>2002,5 mm²0,75 mm²1 mm²1,5 mm²1000,5 mm²0P0 8 16 24 32 [VA, W]Remarques concernant lediagramme• Les valeurs en [VA, W] sur l'axe P sont rattachées aux chutes <strong>de</strong> tension admissibles∆U/2U = 2 % ou 1 %) sur la ligne L, selon le tableau précé<strong>de</strong>nt et le schéma <strong>de</strong>principe.• P est la consommation déterminante <strong>de</strong> tous les servomoteurs montés en parallèle.Schéma <strong>de</strong> principe :chute <strong>de</strong> tension sur leslignes d'alimentationU∆U/2R LLU−∆UMR L∆U/2L4614D09Formules pour le calcul<strong>de</strong> la longueur <strong>de</strong> câbleLes longueurs maximales <strong>de</strong> ligne peuvent être calculées à l'ai<strong>de</strong> <strong>de</strong>s formules ci-aprèsTensiond'alimentation24 V~Chute <strong>de</strong> tension admissiblepar conducteurFormule pour la longueur<strong>de</strong> câble1313 • A4 % <strong>de</strong> 24 V~ L =P[m]1 % <strong>de</strong> 10 V− L =5,47 • A1313 • A230 V~ 2 % <strong>de</strong> 230 V~ L = 46 • [m]PI (-)[m]A Section <strong>de</strong> ligne en [mm 2 ]L Longueur <strong>de</strong> câble admissible en [m]P Consommationen [6 VA] ou [W]; la valeur figure sur la plaque signalétique du servomoteurI(−) Part <strong>de</strong> courant continu dans le conducteur G0 en [A]Longueurs <strong>de</strong> lignepour les servomoteursmontés en parallèleDans les chapitres suivants, on détermine les longueurs <strong>de</strong> ligne et sections admissiblesà l'ai<strong>de</strong> d'exemples, pour les différents types <strong>de</strong> servomoteur.Les exemples avec servomoteurs montés en parallèle sont valables pour le circuit suivant:Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.200521/36
Appareil <strong>de</strong>régulation ou<strong>de</strong> comman<strong>de</strong>L1L1G0GG0GG0GG0GG0GG0GL2L2L2L2A1A2A3A44614S01frSupposition :Les impédances <strong>de</strong> ligne <strong>de</strong> L2 sont i<strong>de</strong>ntiques et négligeables par rapport à L1. Pourd'autres circuits (boucle, étoile), il faut calculer séparément les longueurs <strong>de</strong> ligne admissiblesL2.6.2 Câblage <strong>de</strong>s servomoteurs à comman<strong>de</strong>trois points<strong>Servomoteurs</strong> à comman<strong>de</strong>trois pointsGDB / GLB13...1Consommation et chute<strong>de</strong> tension admissiblespour 1 servomoteurSchéma <strong>de</strong> principe :Intensités pour 24 V~Pour les moteurs trois points, on considère uniquement les conditions pour une alimentation<strong>de</strong> 24 V. Le dimensionnement concerne les lignes 1 (G), 6 (Y1) et 7 (Y2).La consommation d'un moteur et la chute <strong>de</strong> tension admissible sont indiquées sur letableau.Alimentation / Signal<strong>de</strong> comman<strong>de</strong>ConsommationChute <strong>de</strong> tension admissible pourconducteurs 1 (G), 6 (Y1), 7 (Y2)24 V~ 2 VA ∆U/U = max. 8 % (4 % par conducteur)Le schéma montre les courants qui passent dans les lignes <strong>de</strong> connexion pour 1 servomoteur.GDB13.../GLB13...124 V~ 0,083 A~G60 VY1M7ouvertY24634G07frExemple :Raccor<strong>de</strong>ment parallèle<strong>de</strong> 2 servomoteursDétermination <strong>de</strong>s longueurs <strong>de</strong> ligne pour 2 servomoteurs GDB / GLB13...1... et unealimentation <strong>de</strong> 24 V~.Seuls, les courants dans les lignes (G) et 6 (Y1) ou 7 (Y2) sont déterminants pour ledimensionnement <strong>de</strong>s lignes.Chute <strong>de</strong> tension max. admissible = 4 % par conducteur (total 8 %).• Puissance = 2 x 2 VA = 4 VA• Courant du conducteur = 2 x 0,083 A = 0,167 VALongueur <strong>de</strong> ligne simple admissible : 275 m pour 0,75 mm 2 section <strong>de</strong> câble22/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
6.3 Câblage <strong>de</strong>s servomoteurs à comman<strong>de</strong>progressive<strong>Servomoteurs</strong> à comman<strong>de</strong>progressiveGDB / GLB16...1... /GSF16...1Consommation et chute<strong>de</strong> tension admissiblespour 1 servomoteurDans l'alimentation par courant alternatif, il passe dans la ligne G0 un courant d'alimentation0,23 A~ et le courant <strong>de</strong> signal <strong>de</strong> positionnement 0,1 mA− (à partir <strong>de</strong>Y = 0...10 V−). La chute <strong>de</strong> tension alternative sur la ligne G0 n'a aucune influence surle signal <strong>de</strong> comman<strong>de</strong> Y.Tensiond'alimentationConsommationChute <strong>de</strong> tension admissiblepour conducteurs 1 (G), 2 (G0)24 V~ 3 VA 4 % <strong>de</strong> 24 V~Schéma <strong>de</strong> principe :IntensitésLe schéma montre les courants qui passent dans les lignes <strong>de</strong> connexion pour 1 servomoteur.GDB / GLB / GSF16...24 V~ 0,125 A~1G20 V 0,125 A~G080...10 V-YM90...10 V-U4634G08Exemple :montage en parallèle<strong>de</strong> 4 servomoteursDétermination <strong>de</strong>s longueurs <strong>de</strong> ligne pour 4 servomoteurs GDB / GLB16...1... /GSF16...1 et pour une alimentation <strong>de</strong> 24 V~. Seuls les courants alternatifs dans leslignes 1 (G) et 2 (G0) sont déterminants pour le dimensionnement <strong>de</strong>s lignes.Chute <strong>de</strong> tension max. admissible = 4 % par conducteur• Puissance = 4 x 3 VA = 12 VA• Courant du conducteur = 4 x 0,125 A = 0,5 A• Longueur <strong>de</strong> ligne simple admissible pour G, G0 :− 165 m pour 1,5 mm 2 section <strong>de</strong> fil ou− 275 m pour une section <strong>de</strong> câble <strong>de</strong> 2,5 mm 2Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.200523/36
7 Remarques pour la mise en servicePour la mise en service, il est nécessaire <strong>de</strong> disposer <strong>de</strong>s documents suivants :• Le présent manuel technique Z4634fr• Les instructions <strong>de</strong> montage 4 319 2883 0 (M4634) ou 74 319 0394 0 (M4628)• Le schéma <strong>de</strong> l'installation <strong>de</strong> CVC.7.1 Vérification généraleConditions ambiantesVérifier si les valeurs admissibles indiquées au chapitre 8 «Caractéristiques techniques»sont respectées.Contrôle mécanique• Vérifier que le montage a été effectué correctement et que les réglages correspon<strong>de</strong>ntaux spécificités <strong>de</strong> l'installation. Contrôler au besoin l'étanchéité <strong>de</strong>s volets enposition fermée.• S’assurer que le servomoteur est correctement protégé contre les torsions.• Contrôle du mouvement rotatif : réglage manuel <strong>de</strong>s volets en appuyant sur la touche<strong>de</strong> débrayage et en tournant l'adaptateur (uniquement lorsque le moteur esthors tension).Contrôle électrique• Vérifier la conformité du câblage avec le schéma <strong>de</strong> l'installation (voir également lechapitre «Schémas»).• S'assurer que l'alimentation 24 V~ (très basse tension <strong>de</strong> sécurité) ou 230 V~ respectela tolérance admise.7.2 Contrôle électrique du fonctionnementMouvement rotatifComman<strong>de</strong> trois pointsGDB / GLB13...1,GDB / GLB33...1Contrôler comme suit les mo<strong>de</strong>s <strong>de</strong> fonctionnement du moteur (voir aussi chap. 9.3) :Raccor<strong>de</strong>ment <strong>de</strong>s fils24 V~ 230 V~Sens <strong>de</strong> rotation :1 – 6 4 – 6 Sens <strong>de</strong>s aiguilles d'une montre1 – 7 4 – 7 Sens inverse1 - 6 / 1 - 7 ouvert 4 - 6 / 4 - 7 ouvert Le moteur reste dans la position atteinteGDB13...1JGLB13...1L24 V~Raccor<strong>de</strong>ment <strong>de</strong>s filsSens <strong>de</strong> rotationGDB131.1LGLB131.1LGDB13..1JGLB13..1JG-Y1Sens <strong>de</strong>s aiguilles d'une montreMY1GY2Y1GY2MG-Y2G-Y1 / G-Y2ouvertSens inverseLe moteur reste dans la positionatteinteMouvement rotatifComman<strong>de</strong> progressiveGDB16...1... / GLB16...1... /GSF16...1Contrôler comme suit les mo<strong>de</strong>s <strong>de</strong> fonctionnement du moteur (voir aussi chap. 9.4) :• Si l'on applique un signal d'entrée Y = 10 V−, le servomoteur tourne (dans le senshoraire ou en sens inverse selon la position du commutateur DIL correspondant).• Le sens <strong>de</strong> rotation réglé sur le commutateur DIL doit correspondre au sens <strong>de</strong> rotationdésiré <strong>de</strong>s volets.• Lorsque l'alimentation 24 V~ est coupée, le servomoteur reste en position.• Lorsque l’appareil ne reçoit plus le signal <strong>de</strong> comman<strong>de</strong> Y mais reste sous tension, ildoit revenir en position zéro.24/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
Caractéristique du signal<strong>de</strong> comman<strong>de</strong>GDB / GLB163.1,GDB / GLB164.1Réglage d'usine : Les potentiomètres <strong>de</strong> réglage du point <strong>de</strong> départ Uo et <strong>de</strong> la plage<strong>de</strong> travail ∆U sont réglés sur les valeurs suivantes : Uo = 0 V, ∆U = 10 V.Remarque : Les valeurs réglées pour Uo et ∆U doivent être reportées sur la documentation<strong>de</strong> l'installation.Indicateur <strong>de</strong> positionContrôle <strong>de</strong> la tension <strong>de</strong> sortie U :• U = 0...10 V− pour l'angle <strong>de</strong> rotation 90° (non inversée)• U inv. = 10...0 V− pour l'angle <strong>de</strong> rotation 90° (inversée)Potentiomètre <strong>de</strong> recopieContacts auxiliairesA et BImportant :Réglage d'usineMesure <strong>de</strong> la variation <strong>de</strong> résistance pendant la rotation du servomoteur <strong>de</strong> 0 à 90°.• Commutation <strong>de</strong>s contacts auxiliaires "A" et "B", lorsque le servomoteur atteint leurpoint <strong>de</strong> commutation.• Régler les axes <strong>de</strong> réglage sur la valeur désirée à l'ai<strong>de</strong> d'un tournevis (voir égalementle chapitre 3.2 «Plage <strong>de</strong> rotation et limitation mécanique»).Les valeurs angulaires indiquées s'appliquent uniquement dans la position zéro dumoteur en l'absence <strong>de</strong> courant (dans le sens horaire).Les contacts auxiliaires sont réglés comme suit :• Contact A : point <strong>de</strong> commutation à 5°• Contact B : point <strong>de</strong> commutation à 85°Commutateurs DILLes fonctions suivantes peuvent être réglées et doivent être vérifiées :Commutateur DIL 1 :Auto-adaptationself adapt04634 Z15L'auto-adaptation peut être activée/désactivée. Description <strong>de</strong> fonctionnementcf. chapitre «Fonctions».Réglage d'usine : auto-adaptation désactivée (0)Commutateur DIL 2 :Sens <strong>de</strong> rotation :self adapt04634 Z16Le sens <strong>de</strong> rotation réglé doit correspondre au sens <strong>de</strong> rotation désirépour le volet (sens horaire ou antihoraire).Réglage d'usine : sens <strong>de</strong> rotation sens horaire ( )Commutateur DIL 3 :Caractéristique <strong>de</strong> latension <strong>de</strong> sortie pourl'affichage <strong>de</strong> la positionOn peut sélectionner le sens d'action <strong>de</strong> la tension <strong>de</strong> sortie U pour l'affichage <strong>de</strong> positionélectrique indépendamment du sens <strong>de</strong> rotation. Les possibilités sont :Sens <strong>de</strong> rotation 0…90° Position du commutateur DIL Tension <strong>de</strong> sortie Unon inversée 0...10 V–inversée 10...0 V–non inversée 0...10 V–inversée 10...0 V–Réglage d'usineself adapt04634 Z17Caractéristique non inversée ( )Y S = 0…100% (0°…90°)U = 0...10 V–Caractéristique du signal<strong>de</strong> comman<strong>de</strong>,réglage d'usineLe point <strong>de</strong> départ et la plage <strong>de</strong> travail sont réglés en usine comme suit : point <strong>de</strong>départ Uo = 0 V ; plage <strong>de</strong> travail ∆U = 10 VVous pouvez sélectionner les valeurs <strong>de</strong> réglage en fonction <strong>de</strong>s informations <strong>de</strong> larubrique «Technique» à l'ai<strong>de</strong> d'un tournevis.Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.200525/36
8 Caractéristiques techniquesAlimentation 24 V~(TBTS / TBTP) pourGDB / GLB13...1... /GDB / GLB16...1... /GSF16...1Alimentation 230 V~pour GDB / GLB33…1Caractéristiques <strong>de</strong> fonctionnementEntréesTension d'alimentationFréquenceTrès basse tension <strong>de</strong> sécurité (TBTS) ouTrès basse tension <strong>de</strong> protection (TBTP) selonExigences relatives aux transformateurs externes <strong>de</strong> sécurité(100 %)Fusible <strong>de</strong> la ligne d'alimentationConsommation GDB / GLB13...1... : le moteur tourneGDB / GLB16...1... : le moteur tournemoteur à l'arrêtConsommation GSF16...1 : le moteur tournemoteur à l'arrêtTension d'alimentationFréquenceFusible <strong>de</strong> la ligne d'alimentationConsommation le moteur tourneCouple nominalCouple maximal (en cas <strong>de</strong> blocage)Couple d’arrêt minimalAngle <strong>de</strong> rotation nominal (avec affichage <strong>de</strong> position)Angle <strong>de</strong> rotation maximal (limitation mécanique)Temps <strong>de</strong> course pour angle <strong>de</strong> rotation 90°Durée <strong>de</strong> vie mécanique24 V~ ±20 %50 / 60 HzHD 384selon EN 61 558max. 10 A2 VA / 1 W3 VA / 2 W1 W4 VA / 3,7 W2 W230 V~ ±10 %50 / 60 Hzmax. 10 A2 VA / 1 W5 Nm (GDB) / 10 Nm (GLB)2 Nm (GSF)7 Nm (GDB) / 14 Nm (GLB)3,5 Nm (GSF)5 Nm (GDB) / 10 Nm (GLB)2 Nm (GSF)90°95° ±2°150 s (GDB / GLB)20 s (GSF)10 5 cyclesSignal <strong>de</strong> comman<strong>de</strong> pourGDB / GLB13...1...Tension d'alimentation 24 V~ (fils 1-6 / G-Y1) sens <strong>de</strong>s aiguilles d'une montre(fils 1-7 / G-Y2)sens inverseSignal <strong>de</strong> comman<strong>de</strong> pourGDB / GLB33...1Signal <strong>de</strong> comman<strong>de</strong> pourGDB / GLB16...1... / GSF16...1Caractéristique réglable pourGDB / GLB163.1...,GDB / GLB164.1SortiesIndicateur <strong>de</strong> position pourGDB / GLB16...1... / GSF...1(sauf pour GDB / GLB16...1J)Potentiomètre <strong>de</strong> recopie pourGDB / GLB132.1GDB / GLB332.1Tension d'alimentation 230 V~ (fils 4-6)(fils 4-7)Tension d'entrée(fils 8-2 / Y-G0)ConsommationImpédanceTension d'entrée max. admissibleProtégé contre les erreurs <strong>de</strong> raccor<strong>de</strong>mentZone neutre pour caractéristique non réglablepour caractéristique réglableHystérésis pour caractéristique non réglablepour caractéristique réglableRéglable avec 2 potentiomètres :Point <strong>de</strong> départ UoPlage <strong>de</strong> travail ∆UTension d'entrée max.Protégé contre les erreurs <strong>de</strong> raccor<strong>de</strong>mentSignal <strong>de</strong> sortie(fils 9-2 / U-G0)Tension <strong>de</strong> sortie UCourant <strong>de</strong> sortie max.Protégé contre les erreurs <strong>de</strong> raccor<strong>de</strong>mentVariation <strong>de</strong> résistance (fils P1-P2)ChargeCourant <strong>de</strong> contact max.Tension admissible sur le potentiomètre (TBTS/TBTP)Rigidité diélectrique entre potentiomètre et boîtiersens <strong>de</strong>s aiguilles d'une montresens inverse0...10 V–0,1 mA> 100 kΩ35 V– limité en interne à 10 V–max. 24 V~200 mV2 % <strong>de</strong> ∆U70 mV0,7 % <strong>de</strong> ∆U0...5 V–2...30 V–35 V–max. 24 V~0...10 V–1 mAmax. 24 V~0...1000 Ω< 1 W< 10 mA24 V~500 V~26/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
Contacts auxiliaires pourGDB / GLB136.1GDB / GLB336.1GDB / GLB164.1GDB / GLB166.1Câbles <strong>de</strong> raccor<strong>de</strong>mentProtection du boîtierIsolation électriqueConditions ambiantesNormesDimensionsPoidsCharge admissible sur les contactsDurée <strong>de</strong> vie 6 A ohmique, 2 A inductif5 A ohmique, 1 A inductif<strong>sans</strong> chargeTension <strong>de</strong> commutationCourant nominal ohmique / inductifRigidité diélectrique <strong>de</strong>s contacts par rapport au boîtierPlage <strong>de</strong> commutation <strong>de</strong>s contactsPas <strong>de</strong> réglageHystérésis <strong>de</strong> commutationRéglage par défaut <strong>de</strong>s contacts :Contact AContact BSection <strong>de</strong>s fils <strong>de</strong> raccor<strong>de</strong>ment précâblésLongueur <strong>de</strong> câble standardLongueur admissible <strong>de</strong>s lignes <strong>de</strong> signalisationDispositif <strong>de</strong> raccor<strong>de</strong>ment pourType L : par connecteurType J : par bornier à visProtection selon EN 60 529, avec fils <strong>de</strong> raccor<strong>de</strong>ment précâblésProtection selon EN 60 529, avec connecteur ou bornier à visClasse d'isolation24 V~, potentiomètre <strong>de</strong> recopie230 V~, contact auxiliaireFonctionnementConditions climatiquesLieu <strong>de</strong> montageTempératureHumidité (<strong>sans</strong> con<strong>de</strong>nsation)TransportConditions climatiquesTempératureHumidité (<strong>sans</strong> con<strong>de</strong>nsation)Conditions mécaniquesSécurité produitAppareils électriques automatiques <strong>de</strong> régulation et <strong>de</strong> comman<strong>de</strong>pour usage domestique et applications similairesCompatibilité électromagnétique (CEM)Sensibilité aux influences parasites, pour tous les types saufGDB / GLB…32.1xSensibilité aux influences parasites, pour GDB / GLB…32.1xRayonnements perturbateurs, pour tous les typesConformité selonCompatibilité électromagnétiqueDirective relative à la basse tensionConformitéCadre CEM australienRadio Interference Emission StandardServomoteur L x H x P (voir «Encombrements», chap. 1.1)Servomoteur L x H x P (voir «Encombrements», chap. 1.2)Axe <strong>de</strong> voletsrondrond4 pansLongueur min.Dureté maximale <strong>de</strong> l’axeVersions standard, <strong>sans</strong> emballageVersions J et L, <strong>sans</strong> emballage6 A ohmique, 2 A inductif10 4 commutations5 x 10 4 commutations10 6 commutations24...230 V~6 A / 2 A4 kV~5°...90°5°2°5°85°0,75 mm 20,9 m300 m (voir chapitre 6)AMP MTA 100/640456-6Lumberg KRES03, max. 3x2,5 mm²IP 54IP 20selon EN 60 730lllIICEI 721-3-3classe 3K5à l'intérieur, à l'abri <strong>de</strong>s intempéries−32....+55 °C< 95% . h.r.CEI 721-3-2classe 2K2−32...+70 °C< 95% h. r.classe 2M3EN 60-730-2-14(fonctionnement type 1)CEI / EN 61 000-6-2CEI / EN 61 000-6-1CEI / EN 61 000-6-389/336/CEE73/23/CEERadio Communication Act 1992AS / NZS 354870,7 x 137 x 60,6 mm70,7 x 156,2 x 60,6 mm8...16 mm8...10 mm avec kit6...12,8 mm30 mm< 300 HV0,48 kg0,44 kg27/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
9 Schémas9.1 Schémas <strong>de</strong>s connexionsComman<strong>de</strong> 3 pointsGDB / GLB13...1E24 V~GDB / GLB33...1E230 V~TBTS / TBTP0 V~ 0...1000 Ω 24...230 V~ / 6 (2) ATBTS / TBTP230 V~ 0...1000 Ω 24...230 V~ / 6 (2) A6 7 P1 P2 P3 S1 S46 7 P1 P2 P3 S1 S4(Y1)(Y2)M(a)(b)(c)100%A(Q11)B(Q21)(Y1)(Y2)M(a)(b)(c)100%A(Q11)B(Q21)0%(G)(Q12)(Q14)(Q22)(Q24)1 S2 S3 S5 S624 V~4634G03fr0%(N)(Q12)(Q14)(Q22)(Q24)4 S2 S3 S5 S64634G02frGDB / GLB13...1J et GDB / GLB13...1L24 V~0 V−G.B13...Y1 Y2MG24 V~4628G01frComman<strong>de</strong> progressiveY = 0...10 V–, 0...35 V–GDB / GLB16...1E24 V~GSF16...124 V~24 V~TBTS / TBTP0...10 V−24...230 V~ / 6 (2) A24 V~/−TBTS / TBTP0...10 V−1 8 S1 S41 3(G)(Y)100% AM0%(Q11)(Q21)(G0)(U)(Q12)(Q14)(Q22)(Q24)2 9 S2 S3 S5 S60...10 V−B4634G01fr(G)(Y)100%M0%(G0)(U)2 40...10 V−GDB / GLB16...1LGDB / GLB16...1J24 V~ 24 V~24 V~TBTS/TBTP0...10 V−24 V~TBTS/TBTP0...10 V−G.B16..1LGYG.B16..1JGYM100%M100%G00%UG00%4628G02fr28/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
9.2 Repérage <strong>de</strong>s câblesLes fils sont repérés à l'ai<strong>de</strong> <strong>de</strong> couleurs et d'une inscription :Raccor<strong>de</strong>mentCâbleCo<strong>de</strong> N° Couleur Abrév.Signification<strong>Servomoteurs</strong> 24 V~ G 1 rouge RD Potentiel système 24 V~G0 2 noir BK Zéro du systèmeY1 6 violet VT Signal <strong>de</strong> comman<strong>de</strong> 0 V~,„sens horaire"Y2 7 orange OG Signal <strong>de</strong> comman<strong>de</strong> 0 V~,„sens anti-horaire"Y 8 gris GY Signal <strong>de</strong> comman<strong>de</strong> 0...10 V–, 0...35 V−U 9 rose PK Signal <strong>de</strong> recopie 0...10 V–<strong>Servomoteurs</strong> 230 V~ N 4 bleu BU NeutreY1 6 noir BK Signal <strong>de</strong> comman<strong>de</strong> 230 V~,„sens horaire"Y2 7 blanc WH Signal <strong>de</strong> comman<strong>de</strong> 230 V~,„sens anti-horaire“Contact auxiliaire Q11 S1 gris/rouge GY RD Contact A entréeQ12 S2 gris/bleu GY BU Contact A contact reposQ14 S3 gris/rose GY PK Contact A contact travailQ21 S4 noir/rouge BK RD Contact B entréeQ22 S5 noir/bleu BK BU Contact B contact reposQ24 S6 noir/rose BK PK Contact B contact travailPotentiomètre <strong>de</strong> a P1 blanc/rouge WH RD Potentiomètre 0...100 % (P1-P2)recopie b P2 blanc/bleu WH BU Branchement du potentiomètrec P3 blanc/rose WH PK Potentiomètre 100...0 % (P3-P2)GDB131.1LGLB131.1LMGDB16..1LGLB16..1LMGDB131.1JGLB131.1JMGDB16..1JGLB16..1JMY1GY2G0GYUY1GY2G0YG4628Z02Raccor<strong>de</strong>mentBornes / ConnecteurCo<strong>de</strong>SignificationPotentiel système G 24 V~Zéro du systèmeSignal <strong>de</strong> positionnement, sens<strong>de</strong>s aiguilles d'une montreSignal <strong>de</strong> positionnement, sensinverseG0Y1 0 V~Y2 0 V~Signal <strong>de</strong> positionnement Y 0...10 V−, 0...35 V−Affichage <strong>de</strong> position U 0...10 V−Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.200529/36
9.3 Schémas <strong>de</strong> raccor<strong>de</strong>ment (comman<strong>de</strong> 3points)GDB / GLB13...1...24 V~SP(G)4634A05frQ1 Q2(G0) (Y1) (Y2)N24 V~SN6 7 P1 P2 P3 S1 S4GDB13...GLB13...Y1 S2 S3 S5 S6N Appareil <strong>de</strong> régulation ou<strong>de</strong> comman<strong>de</strong>Y ServomoteurGDB / GLB13...1...SP Potentiel du système24 V~SN Zéro du systèmeQ1, Q2 Contacts du régulateurGDB / GLB33...1230 V~L(L)4634A06frQ1Q2(N)(Y1)(Y2)N230 V~N6 7 P1 P2 P3 S1 S4GDB33...GLB33...Y4 S2 S3 S5 S6N Appareil <strong>de</strong> régulation ou<strong>de</strong> comman<strong>de</strong>Y ServomoteurGDB / GLB33...1L Potentiel du système230 V~N Zéro du systèmeQ1, Q2 Contacts du régulateurRégimes <strong>de</strong>s servomoteursGDB / GLB13...1...,GDB / GLB33…1Le tableau indique l'état <strong>de</strong> fonctionnement du moteur pour les <strong>de</strong>ux sens <strong>de</strong> rotation,en fonction <strong>de</strong> la position <strong>de</strong>s contacts du régulateur Q1 et Q2.Contacts <strong>de</strong>srégulateursQ1 Q2Etat <strong>de</strong>fonctionnementReste dans la positionatteinteNon admis4621T02fr30/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
9.4 Schémas <strong>de</strong> raccor<strong>de</strong>ment (comman<strong>de</strong> progressive)9.4.1 Application typeLa sortie du régulateur est directement reliée à l'entrée du servomoteur.GDB / GLB16...1...GSF16...1SP(G)(Y)(G0)N24 V~1 8S1S4SNGDB16.. N Appareil <strong>de</strong> régulation ou <strong>de</strong>GLB16..comman<strong>de</strong>GSF16..1YY Servomoteur GDB / GLB16…12 9 S2 S3 S5 S6GSF16...1P Affichage <strong>de</strong> la positionPSP Potentiel du système 24 V~SN Zéro du système4634A019.4.2 Raccor<strong>de</strong>ment spécial pour comman<strong>de</strong> progressiveLe circuit <strong>de</strong> raccor<strong>de</strong>ment suivant permet d'obtenir différents états <strong>de</strong> fonctionnementdu servomoteur selon la position du commutateur avec les contacts <strong>de</strong> comman<strong>de</strong> K1,K2, K3 (voir tableau <strong>de</strong>s états <strong>de</strong> fonctionnement).Régulation progressive,ouverture complète,fermeture totaleavec GDB / GLB16...1... /GSF16...1SP24 V~SNDK11 8GDB16...GLB16...GSF16...(G)(Y)K2K32 9S1 S4S2 S3 S5 S6P(G0)NY4664A03N Appareil <strong>de</strong> régulation ou <strong>de</strong>comman<strong>de</strong>Y Servomoteur GDB / GLB16...1GSF16...1P Affichage <strong>de</strong> la positionSP Potentiel du système 24 V~SN Zéro du systèmeD Dio<strong>de</strong> (par ex. R4000)K1...K3 Contacts <strong>de</strong> comman<strong>de</strong>(10 V / 0,1 mA)Régimes <strong>de</strong> fonctionnementavec GDB / GLB16...1... /GSF16...1Contacts Etats <strong>de</strong> fonctionnement Sens <strong>de</strong> rotationK3 Régulation progressiveK2 Ouverture complète *)K1Fermeture complèteself adaptself adaptPosition du commutateur DIL004621T01frRemarque :*) L'ouverture complète pour les servomoteurs avec caractéristique réglable dépend<strong>de</strong>s valeurs réglées (Uo, ∆U) et <strong>de</strong> la tolérance <strong>de</strong> la tension d'alimentation.Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.200531/36
10 Indications pour l'élimination <strong>de</strong>sappareilsRemarques généralesCet appareil a été développé et fabriqué avec <strong>de</strong>s matériaux et <strong>de</strong>s procédés qui tiennentcompte <strong>de</strong> l'environnement et sont conformes à nos normes en matière d'environnement.Pour l'élimination <strong>de</strong>s appareils en fin <strong>de</strong> vie ou en cas <strong>de</strong> remplacement, respecterles règles suivantes :• Au moment <strong>de</strong> l'élimination <strong>de</strong> l'appareil en fin <strong>de</strong> vie, il est souhaitable <strong>de</strong> sépareses éléments selon leur matériau, à savoir : acier, fonte d'aluminium et zinc mouléqui ne doivent pas être éliminés avec les déchets domestiques. Ceci concerne enparticulier le circuit imprimé équipé.• Veillez à ce que l'élimination se fasse selon l'état actuel <strong>de</strong> la technique en matière<strong>de</strong> protection <strong>de</strong> l'environnement, <strong>de</strong> recyclage et <strong>de</strong> gestion <strong>de</strong>s déchets.La réglementation locale en vigueur doit être impérativement respectée.• Le but doit toujours être un recyclage maximal <strong>de</strong>s matières <strong>de</strong> base avec unecharge minimale pour l'environnement. Respecter à cet effet les indications concernantle recyclage, qui figurent éventuellement sur certains éléments.Déclaration concernant lapréservation <strong>de</strong> l'environnementLa déclaration concernant l'environnement pour ces servomoteurs contient entre autres<strong>de</strong>s indications quantitatives sur les matériaux utilisés. Vous pouvez l'obtenir sur <strong>de</strong>man<strong>de</strong>auprès <strong>de</strong>s bureaux <strong>de</strong> vente.32/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
11 AnnexeVous trouverez dans ce chapitre :• les dimensions du servomoteur rotatif,• les documents cités.11.1 Encombrements pour GDB / GLB / GSF...1E30.442.8x120.22.78 204.55max 95°504.16859.233.287716814x1218060.6137min. 62min.100x8 -16 mm4634M01min.200min. 6012.8 mm15 mmDimensions en mm11.2 Encombrements pour GDB / GLB...1J et pourGDB / GLB...1LBornier à vismax.2,5 mm 2 (Lumberg KRES03)21.411.824.439.449.160.644.9∅ 4.570.768504.15119.333.286.77.5156.2ConnecteurAMP MTA100/640456-633/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
11.3 Documents référencésBut <strong>de</strong> cette listeLes chapitres précé<strong>de</strong>nts fournissent toutes les informations normalement nécessairespour le montage, le câblage et la mise en service <strong>de</strong>s servomoteurs <strong>rotatifs</strong>, conformémentaux règles <strong>de</strong> sécurité et aux exigences spécifiques <strong>de</strong> chaque projet.DocumentsDans la liste ci-après, vous trouverez d'autres documents auxquels il est fait référencedans ce manuel technique :• Fiches produit (N….) avec spécifications détaillées• Instructions <strong>de</strong> montage (M….), documents joints aux produitsNormesLes normes et directives pour l'ingénierie sont également indiquées.DocumentationtechniqueRéférence dudocumentClassificationTitre / <strong>de</strong>scriptionSommaireSérie GDB / GLB...1... /GSF...1CM2N4634fr(N4634)<strong>Servomoteurs</strong> pour volets d'air, versionrotative (GDB / GLB / GSF...1 :3 points, action progressive)Références <strong>de</strong>s produits,fonctions et critères <strong>de</strong>sélection4 319 2883 0(M4634)Instructions <strong>de</strong> montage pourGDB / GLB / GSF...1Instructions pour le montaged'un servomoteur <strong>rotatifs</strong>ans retour à zéroCM2N4628fr(N4628)<strong>Servomoteurs</strong> pour volets d'air, versionrotative (GDB / GLB...1J et GDB /GLB...1L : 3 points, action progressive)Références <strong>de</strong>s produits,fonctions et critères <strong>de</strong>sélection4 319 0394 0(M4628)Instructions <strong>de</strong> montage pourGDB / GLB...1J et GDB / GLB...1LInstructions pour le montaged'un servomoteur <strong>rotatifs</strong>ans retour à zéroAccessoires pour sérieGDB / GLB...1... /GSF...1CM2N4698fr(N4698)Accessoires et pièces <strong>de</strong> rechangepour servomoteurs GDB / GLB...1... /GSF...1Vue d'ensemble, correspondanceavec le type <strong>de</strong>moteur et application74 319 0000 0(M4634.1)Kit <strong>de</strong> conversion rotatif / linéaire aveclevier ASK71.5Instructions <strong>de</strong> montage74 319 0026 0(M4634.2)Kit <strong>de</strong> conversion rotatif / linéaire aveclevier et support pour montage sur lesol ou montage mural ASK 71.674 319 0236 0(M4614.1)Levier universel ASK71.9NormesHD 384EN 61 558EN 60 730CEI / EN 61 000-6-1CEI / EN 61 000-6-2CEI / EN 61 000-6-389/336/CEE73/23/CEEInstallations électriques dans les bâtimentsSécurité <strong>de</strong>s transformateurs, blocs d'alimentation, etc.Appareils électriques automatiques <strong>de</strong> régulation et <strong>de</strong> comman<strong>de</strong>Compatibilité électromagnétique : sensibilité aux influencesparasites, pour GDB / GLB...32.1xCompatibilité électromagnétique : sensibilité aux influencesparasites, pour tous les types sauf GDB / GLB...32.1xCompatibilité électromagnétique : rayonnements perturbateurs(pour tous les types )Directive relative à la compatibilité électromagnétiqueDirective relative à la basse tension34/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005
Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.200535/36
<strong>Siemens</strong> <strong>Schweiz</strong> <strong>AG</strong>Building Technologies GroupHVAC ProductsGubelstrasse 22CH-6301 ZugTel. +41 41 724 24 24Fax +41 41 724 35 22<strong>Siemens</strong> SABuilding TechnologiesHVAC Products20, rue <strong>de</strong>s Peupliers - B.P. 1701LU-2328 Luxembourg/HammTel. +352 43 843 900Fax +352 43 843 901<strong>Siemens</strong> SASDivision Building TechnologiesHVAC Products95, rue Alexandre FournyFR-94507 Champigny sur MarneTel. +33 8 25 16 11 77Fax +33 8 25 16 31 00<strong>Siemens</strong> <strong>Schweiz</strong> <strong>AG</strong>Building TechnologiesBuilding AutomationRte <strong>de</strong> la Croix-Blanche 1CH-1066 EpalingesTel. +41 21 784 88 88Fax +41 21 784 88 89<strong>Siemens</strong> S.A./N.V.Building TechnologiesHVAC ProductsDemeurslaan 132BE-1654 HuisingenTel. +32 2 536 21 11Fax +32 2 536 24 97© 2005 <strong>Siemens</strong> <strong>Schweiz</strong> <strong>AG</strong>Modifications réservées36/36Building Technologies <strong>Servomoteurs</strong> <strong>rotatifs</strong> <strong>sans</strong> <strong>ressort</strong> <strong>de</strong> <strong>rappel</strong> GDB...1... / GLB...1... / GSF...1 CE1Z4634frHVAC Products 04.2005