TP 13_1 Suspension de moto - Corrigé.pdf - Stephane Genouel.
TP 13_1 Suspension de moto - Corrigé.pdf - Stephane Genouel.
TP 13_1 Suspension de moto - Corrigé.pdf - Stephane Genouel.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>TP</strong> <strong>13</strong>_1 <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> - Corrigé Page 1/8<strong>TP</strong> <strong>13</strong>.1 <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> Corrigé1) Problématique.2) Objectifs du <strong>TP</strong> et sommaire.3) Expérimentation en configuration Paralever. Lorsque JK est horizontal, relever sur la maquette la position angulaire du bras oscillant à l’ai<strong>de</strong> durapporteur (les poids sur le châssis doivent être enlevés).La position <strong>de</strong> référence est pour une position angulaire du bras oscillant <strong>de</strong> <strong>13</strong>,5°. Lancer une acquisition (à vitesse nulle), et observerles valeurs <strong>de</strong> sortie <strong>de</strong>s 2 capteurs accéléromètre etinductif. Déterminer la valeur maximale <strong>de</strong> l’accélérationlongitudinale du point C appartenant à la roue parrapport au sol.On règle 2 tops par secon<strong>de</strong> (ou 1 top toutes les 500 ms)ce qui correspond à 120 tr/min <strong>de</strong> l’excentrique.Accélération maxi 1,5 m.s-2420 ms 920 msMPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff <strong>13</strong>/11/2011
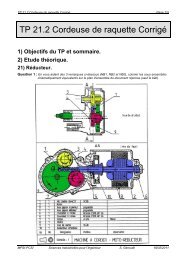
<strong>TP</strong> <strong>13</strong>_1 <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> - Corrigé Page 2/84) Simulation numérique sous Mecaplan.Déplacement du point C appartenant à la roue par rapport au sol (en mm)48- 33 = 15 mm38 - 29 = 9 mmMPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff <strong>13</strong>/11/2011
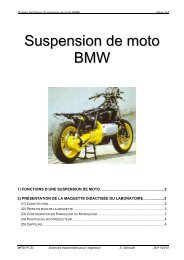
<strong>TP</strong> <strong>13</strong>_1 <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> - Corrigé Page 3/8Vitesse du point C appartenant à la roue par rapport au sol (en mm/s)MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff <strong>13</strong>/11/2011
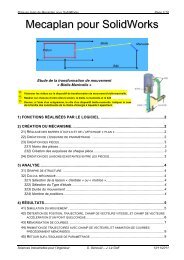
<strong>TP</strong> <strong>13</strong>_1 <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> - Corrigé Page 4/8Accélération du point C appartenant à la roue par rapport au sol (en m/s 2 )MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff <strong>13</strong>/11/2011
<strong>TP</strong> <strong>13</strong>_1 <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> - Corrigé Page 5/85) Bilan.Position angulairedu bras oscillantpour la positionconducteur seul(en °)ExpérimentationAccélération maxidu point Cappartenant à la rouepar rapport au sol(en m/s 2 )Amplitu<strong>de</strong> du déplacementdu point Cappartenant à la rouepar rapport au sol(en mm)Simulation numériqueVitesse du point Cappartenant à la rouepar rapport au sol(en mm/s)(Lorsque JK est horizontal)Accélération maxidu point Cappartenant à la rouepar rapport au sol(en m/s 2 )Paralever <strong>13</strong>,5 1,5 15 97 1,6Monolever 8 1,3 9 57 1Question 1 :• Comparer les résultats (mesurés et simulés) et expliquer l’origine <strong>de</strong>s écarts éventuels.Il existe <strong>de</strong>s écarts, dus à :- la difficulté d’apprécier la position « conducteur seul »,- l’imprécision <strong>de</strong>s mesures directes d’angles ou <strong>de</strong> déplacements sur la maquette,- la difficulté d’apprécier à l’écran la valeur <strong>de</strong> l’accélération maximale,- l’inclinaison prise par l’accéléromètre pendant l’essai (il ne reste pas horizontal),- la différence entre la géométrie réelle <strong>de</strong> la maquette et la géométrie théorique prise pour l’esquisse <strong>de</strong> lasimulation sur Mecaplan.• Peut-on vali<strong>de</strong>r sans risque la simulation sous Mecaplan ?L’écart constaté (entre mesure et simulation) pour la configuration Paralever est faible. On peut donc vali<strong>de</strong>rsans risque la simulation cinématique réalisée sur Mecaplan, ce qui n’est pas le cas pour la configurationMonolever…• Comparer les résultats obtenus entre le Paralever et le Monolever. Quelle est la configuration quioccasionne le moins <strong>de</strong> gêne dans le mouvement longitudinal ?La configuration qui occasionne le moins <strong>de</strong> gêne dans le mouvement longitudinal semble être laconfiguration Monolever…• Est-ce que les <strong>de</strong>ux sont vraiment gênantes sachant qu'une accélération <strong>de</strong> 1 m/s² correspond à uneffort 10 fois moins important que la pesanteur ?Dans les 2 cas, les accélérations sont faibles, et donc les à-coups provoqués ne diminuent pas <strong>de</strong> façonsensible le confort <strong>de</strong> conduite.MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff <strong>13</strong>/11/2011
<strong>TP</strong> <strong>13</strong>_1 <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> - Corrigé Page 7/8Question 3 : Tracer les perpendiculaires aux vecteurs vitesse <strong>de</strong> chacun <strong>de</strong>s points du soli<strong>de</strong> 3. Queconstate-t-on ? Comparer pour les <strong>de</strong>ux positions <strong>de</strong> la suspension.On vérifie graphiquement la propriété du CIR (voir cours).MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff <strong>13</strong>/11/2011
<strong>TP</strong> <strong>13</strong>_1 <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> - Corrigé Page 8/8Question 4 : Proposer, au vue <strong>de</strong>s résultats <strong>de</strong>s questions précé<strong>de</strong>ntes, une métho<strong>de</strong> qui permettrait <strong>de</strong>déterminer graphiquement le vecteur vitesse du centre <strong>de</strong> gravité G 3 <strong>de</strong> la pièce 3.AVANT DE PARTIR, RANGER LE POSTEMPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël – J. Le Goff <strong>13</strong>/11/2011