Suspension de moto BMW - Stephane Genouel.
Suspension de moto BMW - Stephane Genouel.
Suspension de moto BMW - Stephane Genouel.

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Dossier technique <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> <strong>BMW</strong> Page 1/4<strong>Suspension</strong> <strong>de</strong> <strong>moto</strong><strong>BMW</strong>1) FONCTIONS D’UNE SUSPENSION DE MOTO. ............................................................22) PRÉSENTATION DE LA MAQUETTE DIDACTISÉE DU LABORATOIRE....................221) CONSTITUTION.......................................................................................................................... 222) PRISE EN MAIN DE LA MAQUETTE. .............................................................................................. 323) CONFIGURATION EN PARALEVER OU MONOLEVER...................................................................... 324) POSITION DU MOTORÉDUCTEUR................................................................................................. 425) CAPTEURS................................................................................................................................4MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 26/11/2010
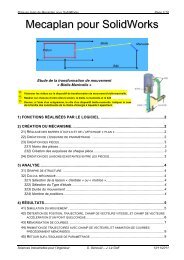
Dossier technique <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> <strong>BMW</strong> Page 2/41) Fonctions d’une suspension <strong>de</strong> <strong>moto</strong>.Les fonctions d’une suspension sont les suivantes : Assurer le contact pneu sur route quelles que soient la forme <strong>de</strong> la chaussée et la vitesse <strong>de</strong> la <strong>moto</strong>. Assurer le confort en limitant et contrôlant les accélérations subies par les passagers (amplitu<strong>de</strong>slimitées et fréquences <strong>de</strong> résonance éloignées <strong>de</strong> celles <strong>de</strong>s organes du corps humain (notion <strong>de</strong>filtre).2) Présentation <strong>de</strong> la maquette didactisée du laboratoire.21) Constitution.La maquette est constituée : D’un ensemble modélisant les composants <strong>de</strong> la suspension (composé du châssis, bras oscillantet tirant, roue et support <strong>de</strong> roue, tige et cylindre d’amortisseur). Cet ensemble reproduit fidèlement lespositions relatives <strong>de</strong>s axes d’articulation d’une véritable suspension. D’un dispositif simulant les irrégularités <strong>de</strong> la chaussée (composé du moteur, réducteur,excentrique et galet). Ce dispositif permet d’imposer à la roue un mouvement sinusoïdal <strong>de</strong> fréquenceet d’amplitu<strong>de</strong> variables. La fréquence est réglée par la vitesse <strong>de</strong> rotation du moteur, et l’amplitu<strong>de</strong>par l’excentration (ici excentration = JK = 32 mm (voir partie 24)). De trois capteurs :- un accéléromètre (placé soit sur le châssis soit sur le support <strong>de</strong> roue),- un capteur d’effort (placé au niveau <strong>de</strong> l’amortisseur) mesurant l’action du ressort + amortisseur,- un capteur inductif délivrant un « Top » à chaque tour <strong>de</strong> la manivelle, et permettant <strong>de</strong>connaître la fréquence d’excitation (donc la fréquence <strong>de</strong>s irrégularités <strong>de</strong> la chaussée). D’un boîtier <strong>de</strong> comman<strong>de</strong> (composé d’un potentiomètre) permettant <strong>de</strong> régler cette fréquence. De masses simulant le conducteur et le passager, chargées sur le châssis (Une glissière gui<strong>de</strong> lechâssis sur le support) :- aucune masse correspond à la position dite <strong>de</strong> référence,- une masse <strong>de</strong> 1 kg simule la présence d’un conducteur seul (masse réelle <strong>de</strong> 85 kg),- une charge <strong>de</strong> 2,5 kg simule la charge maxi (masse réelle <strong>de</strong> 211 kg = 85 kg x 2,5) (la similitu<strong>de</strong>est respectée).Trou <strong>de</strong> passagepour la vis qui fixerale support <strong>de</strong> rouesur le bras oscillantseulement pour laconfigurationMonoleverMPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 26/11/2010
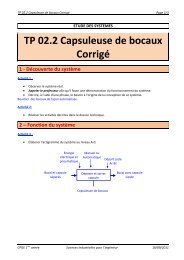
Dossier technique <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> <strong>BMW</strong> Page 3/422) Prise en main <strong>de</strong> la maquette. NE PAS ALLUMER LE BOITIER DE COMMANDE. Repérer moteur, réducteur, excentrique, galet ainsi que les 3 capteurs. I<strong>de</strong>ntifier le type <strong>de</strong> réducteur, ainsi que le type <strong>de</strong>s différents capteurs (analogique, numérique ou TOR). Selon vous, quelle sera la forme du signal délivré par le capteur inductif ? Que peut-on en faire (c'est-àdire,quelle est la fonction <strong>de</strong> ce capteur ?) ? Vali<strong>de</strong>r avec le professeur. Prendre soin <strong>de</strong>s fils <strong>de</strong>s capteurs en vérifiant que ceux-ci ne seront pas arrachés lors du mouvement. Régler le potentiomètre du boitier <strong>de</strong> comman<strong>de</strong> sur 0. Allumer le boitier <strong>de</strong> comman<strong>de</strong> par le bouton M/A. Augmenter tout doucement le potentiomètre du boitier <strong>de</strong> comman<strong>de</strong> et observer les différentsmouvements. Remettre à 0 le potentiomètre du boitier <strong>de</strong> comman<strong>de</strong>.23) Configuration en Paralever ou Monolever.Les mécanismes <strong>de</strong> suspension <strong>de</strong> <strong>moto</strong> présentent une gran<strong>de</strong> variété <strong>de</strong> solutions techniques. Cettemaquette reprend les dimensions géométriques du dispositif Paralever <strong>de</strong> <strong>BMW</strong> (système à 4 barres) etpermet <strong>de</strong> comparer ses performances avec un système classique Monolever (système à 1 barre).Il est alors possible <strong>de</strong> comparer leur comportement cinématique (vitesse, accélération) ainsi que leurcomportement dynamique (amortissement dans le temps) lorsqu'elles sont sollicitées par <strong>de</strong>s "bosses".ABCED<strong>Suspension</strong> Paralever Visionner les vidéos situées dans le répertoire SII Elève / Dossier technique.AFC<strong>Suspension</strong> MonoleverMPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 26/11/2010
Dossier technique <strong>Suspension</strong> <strong>de</strong> <strong>moto</strong> <strong>BMW</strong> Page 4/4Etapes à lire et à suivre SEULEMENT si on vous <strong>de</strong>man<strong>de</strong> au cours du TP <strong>de</strong> démonter/monter pourpasser d’une configuration à l’autre :Afin d'éviter <strong>de</strong>s phases inutiles <strong>de</strong> montage et démontage, il est conseillé <strong>de</strong> pratiquer toutes les mesurespour une configuration avant <strong>de</strong> passer à l'autre.Pour passer <strong>de</strong> la configuration Monolever à Paralever, effectuer les actions suivantes chronologiquement : désolidariser le <strong>moto</strong>-réducteur du "châssis" en dévissant la vis au centre du galet et en enlevant legalet, puis en <strong>de</strong>sserrant la grosse vis qui bloque le plateau blanc sur la glissière cylindrique. visser la 2 ème vis du tirant (au point E), dévisser la 2 ème vis du bras oscillant (entre les points B et C).Pour passer <strong>de</strong> la configuration Paralever à Monolever, effectuer les actions suivantes chronologiquement : désolidariser le <strong>moto</strong>-réducteur du "châssis" en dévissant la vis au centre du galet et en enlevant legalet, puis en <strong>de</strong>sserrant la grosse vis qui bloque le plateau blanc sur la glissière cylindrique. visser la 2 ème vis du bras oscillant (entre les points B et C), dévisser la 2 ème vis du tirant (au point E).24) Position du <strong>moto</strong>réducteur.Pour simuler l'irrégularité du sol, il est possible avec les <strong>de</strong>ux configurations (Paralever ou Monolever), <strong>de</strong>déplacer soit le châssis 5 par rapport au sol 1, soit la plaque 9 par rapport au sol 1.Pour cela, on positionne le <strong>moto</strong>réducteur muni <strong>de</strong> l’excentrique JK à 2 endroits différents.Exemple pour le système Paralever :Déplacement du châssis 5 / sol 1 Déplacement <strong>de</strong> la plaque 9 / sol 1NB : - K est le point au centre du galet 10,- L est le point <strong>de</strong> contact entre le galet 10 et le châssis 5 (pour le <strong>de</strong>ssin <strong>de</strong> gauche),- JK est l’excentrique 11, et vaut pour notre système 32 mm.25) Capteurs.Alimentation.Pour obtenir <strong>de</strong>s informations provenant <strong>de</strong>s capteurs, il est nécessaire <strong>de</strong> les alimenter (donc d’allumer leboitier), même si la vitesse <strong>de</strong> rotation à l’entrée est nulle.Sensibilité.Capteur d’effort : 79,5 N/V.2,548V2Accéléromètre : 2,548 V/g soit 0,26 V /(m.s ) .29,81m.sMPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 26/11/2010