teknik pemeliharaan dan perbaikan sistem elektronika jilid 3 smk
teknik pemeliharaan dan perbaikan sistem elektronika jilid 3 smk
teknik pemeliharaan dan perbaikan sistem elektronika jilid 3 smk

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Pemeliharaan Sistem Berbasis Mikroprosesor<br />
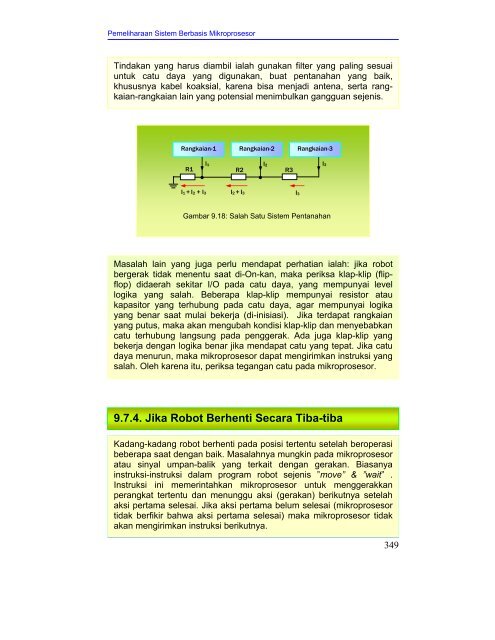
Tindakan yang harus diambil ialah gunakan filter yang paling sesuai<br />
untuk catu daya yang digunakan, buat pentanahan yang baik,<br />
khususnya kabel koaksial, karena bisa menjadi antena, serta rangkaian-rangkaian<br />
lain yang potensial menimbulkan gangguan sejenis.<br />
Rangkaian-1 Rangkaian-2 Rangkaian-3<br />
I1 I2 I3<br />
R1 R2 R3<br />
I1 + I2 + I3<br />
I2 + I3<br />
Gambar 9.18: Salah Satu Sistem Pentanahan<br />
Masalah lain yang juga perlu mendapat perhatian ialah: jika robot<br />
bergerak tidak menentu saat di-On-kan, maka periksa klap-klip (flipflop)<br />
didaerah sekitar I/O pada catu daya, yang mempunyai level<br />
logika yang salah. Beberapa klap-klip mempunyai resistor atau<br />
kapasitor yang terhubung pada catu daya, agar mempunyai logika<br />
yang benar saat mulai bekerja (di-inisiasi). Jika terdapat rangkaian<br />
yang putus, maka akan mengubah kondisi klap-klip <strong>dan</strong> menyebabkan<br />
catu terhubung langsung pada penggerak. Ada juga klap-klip yang<br />
bekerja dengan logika benar jika mendapat catu yang tepat. Jika catu<br />
daya menurun, maka mikroprosesor dapat mengirimkan instruksi yang<br />
salah. Oleh karena itu, periksa tegangan catu pada mikroprosesor.<br />
9.7.4. Jika Robot Berhenti Secara Tiba-tiba<br />
Ka<strong>dan</strong>g-ka<strong>dan</strong>g robot berhenti pada posisi tertentu setelah beroperasi<br />
beberapa saat dengan baik. Masalahnya mungkin pada mikroprosesor<br />
atau sinyal umpan-balik yang terkait dengan gerakan. Biasanya<br />
instruksi-instruksi dalam program robot sejenis ”move” & ”wait” .<br />
Instruksi ini memerintahkan mikroprosesor untuk menggerakkan<br />
perangkat tertentu <strong>dan</strong> menunggu aksi (gerakan) berikutnya setelah<br />
aksi pertama selesai. Jika aksi pertama belum selesai (mikroprosesor<br />
tidak berfikir bahwa aksi pertama selesai) maka mikroprosesor tidak<br />
akan mengirimkan instruksi berikutnya.<br />
I3<br />
349