

pemodelan lup kendali chopper dc menggunakan ... - jurnalsmartek
pemodelan lup kendali chopper dc menggunakan ... - jurnalsmartek
pemodelan lup kendali chopper dc menggunakan ... - jurnalsmartek
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
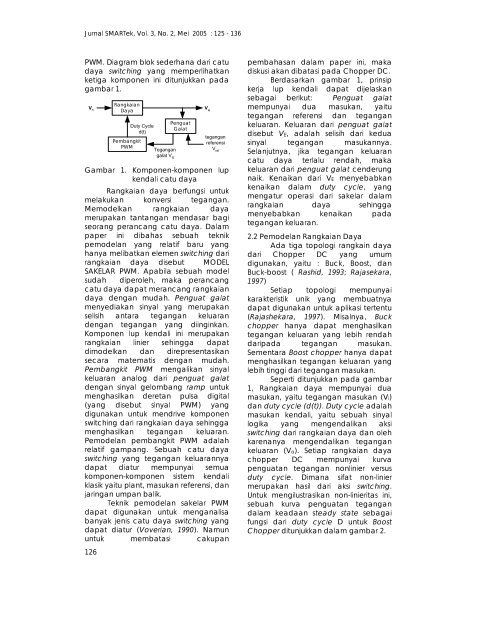
Jurnal SMARTek, Vol. 3, No. 2, Mei 2005 : 125 - 136PWM. Diagram blok sederhana dari catudaya switching yang memperlihatkanketiga komponen ini ditunjukkan padagambar 1.V 1126RangkaianDayaPembangkitPWMDuty Cycled(t)Tegangangalat V EPenguatGalatV oteganganreferensiV refGambar 1. Komponen-komponen <strong>lup</strong><strong>kendali</strong> catu dayaRangkaian daya berfungsi untukmelakukan konversi tegangan.Memodelkan rangkaian dayamerupakan tantangan mendasar bagiseorang perancang catu daya. Dalampaper ini dibahas sebuah teknik<strong>pemodelan</strong> yang relatif baru yanghanya melibatkan elemen switching darirangkaian daya disebut MODELSAKELAR PWM. Apabila sebuah modelsudah diperoleh, maka perancangcatu daya dapat merancang rangkaiandaya dengan mudah. Penguat galatmenyediakan sinyal yang merupakanselisih antara tegangan keluarandengan tegangan yang diinginkan.Komponen <strong>lup</strong> <strong>kendali</strong> ini merupakanrangkaian linier sehingga dapatdimodelkan dan direpresentasikansecara matematis dengan mudah.Pembangkit PWM mengalikan sinyalkeluaran analog dari penguat galatdengan sinyal gelombang ramp untukmenghasilkan deretan pulsa digital(yang disebut sinyal PWM) yangdigunakan untuk mendrive komponenswitching dari rangkaian daya sehinggamenghasilkan tegangan keluaran.Pemodelan pembangkit PWM adalahrelatif gampang. Sebuah catu dayaswitching yang tegangan keluarannyadapat diatur mempunyai semuakomponen-komponen sistem <strong>kendali</strong>klasik yaitu plant, masukan referensi, danjaringan umpan balik.Teknik <strong>pemodelan</strong> sakelar PWMdapat digunakan untuk menganalisabanyak jenis catu daya switching yangdapat diatur (Voverian, 1990). Namununtuk membatasi cakupanpembahasan dalam paper ini, makadiskusi akan dibatasi pada Chopper DC.Berdasarkan gambar 1, prinsipkerja <strong>lup</strong> <strong>kendali</strong> dapat dijelaskansebagai berikut: Penguat galatmempunyai dua masukan, yaitutegangan referensi dan tegangankeluaran. Keluaran dari penguat galatdisebut VE, adalah selisih dari keduasinyal tegangan masukannya.Selanjutnya, jika tegangan keluarancatu daya terlalu rendah, makakeluaran dari penguat galat cenderungnaik. Kenaikan dari VE menyebabkankenaikan dalam duty cycle, yangmengatur operasi dari sakelar dalamrangkaian daya sehinggamenyebabkan kenaikan padategangan keluaran.2.2 Pemodelan Rangkaian DayaAda tiga topologi rangkain dayadari Chopper DC yang umumdigunakan, yaitu : Buck, Boost, danBuck-boost ( Rashid, 1993; Rajasekara,1997)Setiap topologi mempunyaikarakteristik unik yang membuatnyadapat digunakan untuk aplikasi tertentu(Rajashekara, 1997). Misalnya, Buck<strong>chopper</strong> hanya dapat menghasilkantegangan keluaran yang lebih rendahdaripada tegangan masukan.Sementara Boost <strong>chopper</strong> hanya dapatmenghasilkan tegangan keluaran yanglebih tinggi dari tegangan masukan.Seperti ditunjukkan pada gambar1, Rangkaian daya mempunyai duamasukan, yaitu tegangan masukan (Vi)dan duty cycle (d(t)). Duty cycle adalahmasukan <strong>kendali</strong>, yaitu sebuah sinyallogika yang mengendalikan aksiswitching dari rangkaian daya dan olehkarenanya mengendalikan tegangankeluaran (Vo). Setiap rangkaian daya<strong>chopper</strong> DC mempunyai kurvapenguatan tegangan nonlinier versusduty cycle. Dimana sifat non-liniermerupakan hasil dari aksi switching.Untuk mengilustrasikan non-linieritas ini,sebuah kurva penguatan tegangandalam keadaan steady state sebagaifungsi dari duty cycle D untuk BoostChopper ditunjukkan dalam gambar 2.













