

pemodelan lup kendali chopper dc menggunakan ... - jurnalsmartek
pemodelan lup kendali chopper dc menggunakan ... - jurnalsmartek
pemodelan lup kendali chopper dc menggunakan ... - jurnalsmartek
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
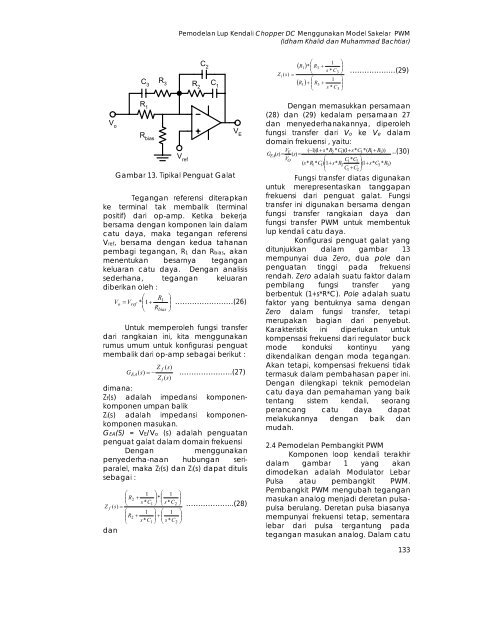
Pemodelan Lup Kendali Chopper DC Menggunakan Model Sakelar PWM(Idham Khalid dan Muhammad Bachtiar)R 3C 2C 3 R 2C 1R 1V oVR EbiasV refGambar 13. Tipikal Penguat GalatTegangan referensi diterapkanke terminal tak membalik (terminalpositif) dari op-amp. Ketika bekerjabersama dengan komponen lain dalamcatu daya, maka tegangan referensiVref, bersama dengan kedua tahananpembagi tegangan, R1 dan Rbias, akanmenentukan besarnya tegangankeluaran catu daya. Dengan analisissederhana, tegangan keluarandiberikan oleh :⎛ R ⎞= ⎜ ⎟+1VoVref* 1……………………(26)⎝ Rbias⎠Untuk memperoleh fungsi transferdari rangkaian ini, kita <strong>menggunakan</strong>rumus umum untuk konfigurasi penguatmembalik dari op-amp sebagai berikut :Z f ( s)GEA(s)= − ………………….(27)Zi( s)dimana:Zf(s) adalah impedansi komponenkomponenumpan balikZi(s) adalah impedansi komponenkomponenmasukan.GEA(S) = VE/Vo (s) adalah penguatanpenguat galat dalam domain frekuensiDengan<strong>menggunakan</strong>penyederha-naan hubungan seriparalel,maka Zf(s) dan Zi(s) dapat ditulissebagai :⎛⎜R2+⎝ sZ f ( s)=⎛⎜R2+⎝ sdan1 ⎞ ⎛⎟ ⎜** C1 ⎠ ⎝ s1 ⎞ ⎛⎟ + ⎜* C1 ⎠ ⎝ s1 ⎞⎟* C2 ⎠1 ⎞⎟* C2 ⎠………………..(28)Z i ( s)=⎛ 1 ⎞1 * ⎜⎟R3+⎝ s * C3⎠⎛ 1 ⎞⎝( R )( R1) + ⎜R3+s * C ⎟ 3 ⎠…………….…(29)Dengan memasukkan persamaan(28) dan (29) kedalam persamaan 27dan menyederhanakannya, diperolehfungsi transfer dari Vo ke Ve dalamdomain frekuensi , yaitu:VE( −1)(1+s*R2* C1)( 1+s*C3*( R1+ R3))GEA(s)= ( s)=..(30)VO⎛ C1* C2⎞( s*R1* C1) ⎜1s*R2⎟+(1 + s*C3* R3)C1C⎝ + 2 ⎠Fungsi transfer diatas digunakanuntuk merepresentasikan tanggapanfrekuensi dari penguat galat. Fungsitransfer ini digunakan bersama denganfungsi transfer rangkaian daya danfungsi transfer PWM untuk membentuk<strong>lup</strong> <strong>kendali</strong> catu daya.Konfigurasi penguat galat yangditunjukkan dalam gambar 13mempunyai dua Zero, dua pole danpenguatan tinggi pada frekuensirendah. Zero adalah suatu faktor dalampembilang fungsi transfer yangberbentuk (1+s*R*C). Pole adalah suatufaktor yang bentuknya sama denganZero dalam fungsi transfer, tetapimerupakan bagian dari penyebut.Karakteristik ini diperlukan untukkompensasi frekuensi dari regulator buckmode konduksi kontinyu yangdi<strong>kendali</strong>kan dengan moda tegangan.Akan tetapi, kompensasi frekuensi tidaktermasuk dalam pembahasan paper ini.Dengan dilengkapi teknik <strong>pemodelan</strong>catu daya dan pemahaman yang baiktentang sistem <strong>kendali</strong>, seorangperancang catu daya dapatmelakukannya dengan baik danmudah.2.4 Pemodelan Pembangkit PWMKomponen loop <strong>kendali</strong> terakhirdalam gambar 1 yang akandimodelkan adalah Modulator LebarPulsa atau pembangkit PWM.Pembangkit PWM mengubah teganganmasukan analog menjadi deretan pulsapulsaberulang. Deretan pulsa biasanyamempunyai frekuensi tetap, sementaralebar dari pulsa tergantung padategangan masukan analog. Dalam catu133













