

Download PENGENDALIAN MOTOR SINKRON ... - jurnalsmartek
Download PENGENDALIAN MOTOR SINKRON ... - jurnalsmartek
Download PENGENDALIAN MOTOR SINKRON ... - jurnalsmartek
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
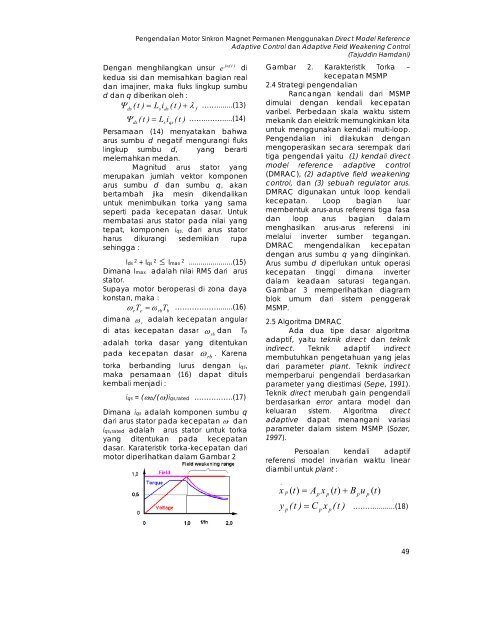
Pengendalian Motor Sinkron Magnet Permanen Menggunakan Direct Model ReferenceAdaptive Control dan Adaptive Field Weakening Control(Tajuddin Hamdani)e ∈j ( t )Dengan menghilangkan unsur dikedua sisi dan memisahkan bagian realdan imajiner, maka fluks lingkup sumbud dan q diberikan oleh :Ψds( t ) = Lsids( t ) + λ ……........(13)fΨds( t ) = Lsiqs( t ) ……..…….....(14)Persamaan (14) menyatakan bahwaarus sumbu d negatif mengurangi flukslingkup sumbu d, yang berartimelemahkan medan.Magnitud arus stator yangmerupakan jumlah vektor komponenarus sumbu d dan sumbu q, akanbertambah jika mesin dikendalikanuntuk menimbulkan torka yang samaseperti pada kecepatan dasar. Untukmembatasi arus stator pada nilai yangtepat, komponen iqs, dari arus statorharus dikurangi sedemikian rupasehingga :Ids 2 + Iqs 2 ≤ Imax 2 ......................(15)Dimana Imax adalah nilai RMS dari arusstator.Supaya motor beroperasi di zona dayakonstan, maka :ωrTe= ωrbT……………….......(16)bdimana ω adalah kecepatan angularrdi atas kecepatan dasar ω rbdan Tbadalah torka dasar yang ditentukanpada kecepatan dasar ωrb. Karenatorka berbanding lurus dengan iqs,maka persamaan (16) dapat dituliskembali menjadi :iqs = (ωrb/(ωr)iqs,rated …………….(17)Dimana iqs adalah komponen sumbu qdari arus stator pada kecepatan ωr daniqs,rated adalah arus stator untuk torkayang ditentukan pada kecepatandasar. Karateristik torka-kecepatan darimotor diperlihatkan dalam Gambar 2Gambar 2. Karakteristik Torka –kecepatan MSMP2.4 Strategi pengendalianRancangan kendali dari MSMPdimulai dengan kendali kecepatanvaribel. Perbedaan skala waktu sistemmekanik dan elektrik memungkinkan kitauntuk menggunakan kendali multi-loop.Pengendalian ini dilakukan denganmengoperasikan secara serempak daritiga pengendali yaitu (1) kendali directmodel reference adaptive control(DMRAC), (2) adaptive field weakeningcontrol, dan (3) sebuah regulator arus.DMRAC digunakan untuk loop kendalikecepatan. Loop bagian luarmembentuk arus-arus referensi tiga fasadan loop arus bagian dalammenghasilkan arus-arus referensi inimelalui inverter sumber tegangan.DMRAC mengendalikan kecepatandengan arus sumbu q yang diinginkan.Arus sumbu d diperlukan untuk operasikecepatan tinggi dimana inverterdalam keadaan saturasi tegangan.Gambar 3 memperlihatkan diagramblok umum dari sistem penggerakMSMP.2.5 Algoritma DMRACAda dua tipe dasar algoritmaadaptif, yaitu teknik direct dan teknikindirect. Teknik adaptif indirectmembutuhkan pengetahuan yang jelasdari parameter plant. Teknik indirectmemperbarui pengendali berdasarkanparameter yang diestimasi (Sepe, 1991).Teknik direct merubah gain pengendaliberdasarkan error antara model dankeluaran sistem. Algoritma directadaptive dapat menangani variasiparameter dalam sistem MSMP (Sozer,1997).Persoalan kendali adaptifreferensi model invarian waktu lineardiambil untuk plant :.x p ( t)= A x ( t)+p pBpuy ( t ) C x ( t )p( t)p=p p ………..........(18)49













