

Download PENGENDALIAN MOTOR SINKRON ... - jurnalsmartek
Download PENGENDALIAN MOTOR SINKRON ... - jurnalsmartek
Download PENGENDALIAN MOTOR SINKRON ... - jurnalsmartek
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
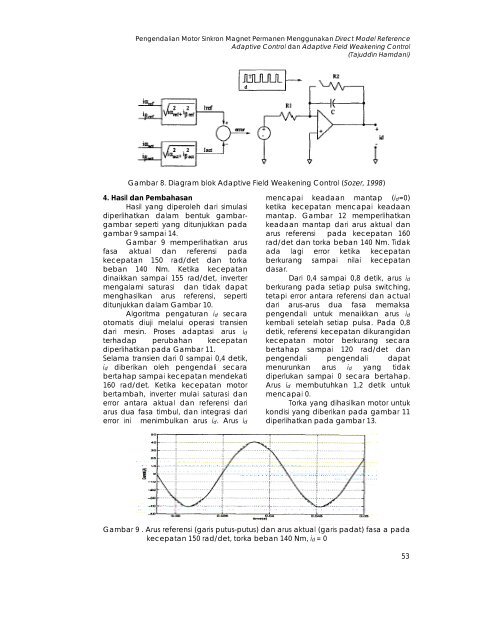
Pengendalian Motor Sinkron Magnet Permanen Menggunakan Direct Model ReferenceAdaptive Control dan Adaptive Field Weakening Control(Tajuddin Hamdani)Gambar 8. Diagram blok Adaptive Field Weakening Control (Sozer, 1998)4. Hasil dan PembahasanHasil yang diperoleh dari simulasidiperlihatkan dalam bentuk gambargambarseperti yang ditunjukkan padagambar 9 sampai 14.Gambar 9 memperlihatkan arusfasa aktual dan referensi padakecepatan 150 rad/det dan torkabeban 140 Nm. Ketika kecepatandinaikkan sampai 155 rad/det, invertermengalami saturasi dan tidak dapatmenghasilkan arus referensi, sepertiditunjukkan dalam Gambar 10.Algoritma pengaturan id secaraotomatis diuji melalui operasi transiendari mesin. Proses adaptasi arus idterhadap perubahan kecepatandiperlihatkan pada Gambar 11.Selama transien dari 0 sampai 0,4 detik,id diberikan oleh pengendali secarabertahap sampai kecepatan mendekati160 rad/det. Ketika kecepatan motorbertambah, inverter mulai saturasi danerror antara aktual dan referensi dariarus dua fasa timbul, dan integrasi darierror ini menimbulkan arus id. Arus idmencapai keadaan mantap (id=0)ketika kecepatan mencapai keadaanmantap. Gambar 12 memperlihatkankeadaan mantap dari arus aktual danarus referensi pada kecepatan 160rad/det dan torka beban 140 Nm. Tidakada lagi error ketika kecepatanberkurang sampai nilai kecepatandasar.Dari 0,4 sampai 0,8 detik, arus idberkurang pada setiap pulsa switching,tetapi error antara referensi dan actualdari arus-arus dua fasa memaksapengendali untuk menaikkan arus idkembali setelah setiap pulsa. Pada 0,8detik, referensi kecepatan dikurangidankecepatan motor berkurang secarabertahap sampai 120 rad/det danpengendali pengendali dapatmenurunkan arus id yang tidakdiperlukan sampai 0 secara bertahap.Arus id membutuhkan 1,2 detik untukmencapai 0.Torka yang dihasilkan motor untukkondisi yang diberikan pada gambar 11diperlihatkan pada gambar 13.Gambar 9 . Arus referensi (garis putus-putus) dan arus aktual (garis padat) fasa a padakecepatan 150 rad/det, torka beban 140 Nm, id = 053













