

capitolo04.pdf
capitolo04.pdf
capitolo04.pdf

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
CAPITOLO 4<br />
L’ORIZZONTE IN NAVIGAZIONE<br />
83<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
4.1 –La curva di rifrazione geodetica<br />
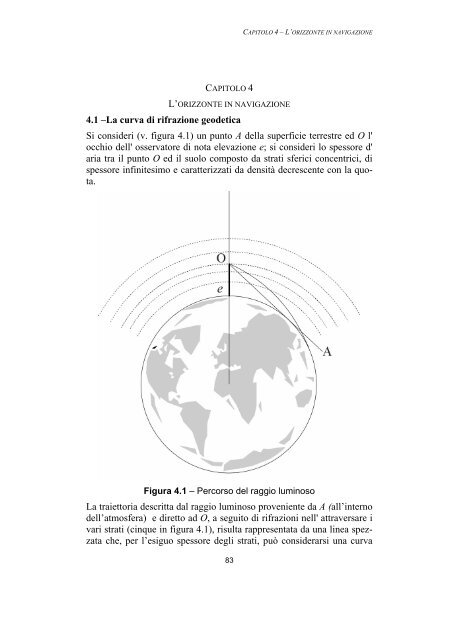
Si consideri (v. figura 4.1) un punto A della superficie terrestre ed O l'<br />
occhio dell' osservatore di nota elevazione e; si consideri lo spessore d'<br />
aria tra il punto O ed il suolo composto da strati sferici concentrici, di<br />
spessore infinitesimo e caratterizzati da densità decrescente con la quota.<br />
Figura 4.1 – Percorso del raggio luminoso<br />
La traiettoria descritta dal raggio luminoso proveniente da A (all’interno<br />
dell’atmosfera) e diretto ad O, a seguito di rifrazioni nell' attraversare i<br />
vari strati (cinque in figura 4.1), risulta rappresentata da una linea spezzata<br />
che, per l’esiguo spessore degli strati, può considerarsi una curva
84<br />
MARIO VULTAGGIO<br />
nota quale curva di rifrazione geodetica, analoga a quella relativa alla<br />
traiettoria dei raggi luminosi provenienti dagli astri che prende il nome<br />
di curva di rifrazione astronomica. Le curve sono situate nei piani verticali<br />
dei punti terrestri o degli astri e le loro concavità sono generalmente<br />
rivolte verso la superficie terrestre.<br />
Questo fenomeno dell’ottica fisica, che va sotto il nome di rifrazione,<br />
è regolato da due note leggi di Descartes e conduce al principio di Fermat:<br />
La traiettoria seguita dal raggio luminoso è caratterizzata dal minimo<br />
tempo impiegato escludendo il tratto rettilineo tra A ed O, il raggio<br />
luminoso segue per il fenomeno della rifrazione la traiettoria di minimo<br />
percorso, data proprio dalla curva di rifrazione ABO (v. figura.<br />
4.2).<br />
Figura 4.2 – Percorso rifratto del raggio luminoso<br />
Si ha rifrazione anche nella propagazione delle onde elettromagnetiche<br />
che differiscono da quelle luminose per la diversa lunghezza d'onda. Il<br />
raggio di curvatura della curva di rifrazione geodetica nel punto O può<br />
ritenersi espresso dalla relazione:<br />
R + e<br />
ρ = cosec<br />
zr<br />
(4.1)<br />
K o<br />
che, per la piccolezza dell'elevazione e rispetto al raggio terrestre R, diventa:<br />
R<br />
ρ = cosec<br />
zr<br />
(4.2)<br />
K<br />
o
85<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
con zr la distanza zenitale rifratta del punto A e Ko coefficiente di rifrazione<br />
geodetica nel punto O, al suolo Ko è dato da:<br />
K<br />
o<br />
⎟ ⎛ 1 1 dT ⎞<br />
= Rα<br />
⎜ +<br />
(4.3)<br />
⎝ l To<br />
dh ⎠<br />
dove α è la costante di rifrazione, dipendente dalle condizioni fisiche<br />
dell' aria nel punto O, l è l'altezza di pressione (l’altezza dell' atmosfera<br />
considerata a densità costante, l=8 km), To la temperatura assoluta al<br />
suolo e dT/dh il suo gradiente, sempre nel punto O.<br />
Il coefficiente di rifrazione geodetica ed, in modo speciale, il gradiente<br />
termico nei bassi strati dell' atmosfera caratterizzano la curva di rifrazione<br />
geodetica nel punto d'osservazione; infatti, questa può degenerare<br />
in una retta, volgere la concavità al cielo ed assumere anche un raggio<br />
di curvatura uguale a quello terrestre. Nel primo caso l' orizzonte marino<br />
od apparente coincide con quello geometrico (vedi paragrafo successivo),<br />
nel secondo si vedono gli oggetti capovolti e nel terzo si ha la<br />
possibilità di vedere, con atmosfera trasparente, oggetti situati in qualsiasi<br />
punto della superficie terrestre, teoricamente anche all'antipodo:<br />
quest' ultimo fenomeno è detto miraggio.<br />
Considerando nel punto O condizioni fisiche medie dell' atmosfera<br />
caratterizzate da:<br />
To = 273 ° K , α = 0.<br />
000292 ,<br />
dT<br />
= −5.<br />
6/<br />
1000<br />
dh<br />
°<br />
ed essendo:<br />
R = 6371000 m , l = 8000 m<br />
[ ] [ ]<br />
[ C / m]<br />
il coefficiente Ko assume il valore di circa 0.16 noto quale coefficiente<br />
medio di rifrazione geodetica<br />
La distanza zenitale rifratta zr del punto A può ritenersi uguale a 90°,<br />
per cui la relazione del raggio di curvatura diventa:<br />
R<br />
ρ =<br />
(4.4)<br />
K<br />
e, per essere Ko = 0.16 con condizioni fisiche medie dell' aria nel punto<br />
d' osservazione, si ha:<br />
o<br />
ρ = 6 ÷ 7R<br />
(4.5)<br />
cosicché il raggio di curvatura della curva di rifrazione geodetica nel<br />
punto O può ritenersi uguale a circa sei-sette volte quello terrestre; inoltre,<br />
trattandosi di piccoli valori dell'angolo ω (angolo al centro della
86<br />
MARIO VULTAGGIO<br />
Terra tra la verticale dell' osservatore ed il raggio terrestre relativo al<br />
punto A), può considerarsi circolare l' arco di curva ABO di figura 4.2.<br />
Dalla (4.3) risulta:<br />
R<br />
K o = (4.6)<br />
ρ<br />
per cui su qualche testo il coefficiente Ko viene definito quale rapporto<br />
tra il raggio terrestre e quello della curva di rifrazione geodetica; questa<br />
definizione non può .essere accettata dato che è valida soltanto nel caso<br />
particolare di zr = 90°.<br />
L' osservatore vede il punto A, sempre in figura 4.2, provenire sempre<br />
secondo la direzione della tangente t alla curva nel punto O e l' angolo<br />
che questa tangente forma col tratto rettilineo AO rappresenta l'<br />
importo di rifrazione geodetica, dato da:<br />
K o<br />
r = ω<br />
2<br />
relazione nota quale legge di Biot, ,valida soltanto per piccoli valori di<br />
ω ; questa condizione vale anche per l' attendibilità della (4.2).<br />
4.2- Orizzonte geometrico<br />
Non considerando la presenza dell’atmosfera, essendo rettilinei i percorsi<br />
dei raggi luminosi, l' osservatore posto in O, con elevazione e, ha<br />
per limite alla sua vista la circonferenza minore c, situata in un piano orizzontale,<br />
detta orizzonte geometrico. Questa circonferenza viene definita<br />
dalle visuali condotte dal suo occhio (punto O) e tangenti ai vari<br />
punti della superficie terrestre, generatrici di un cono retto con il punto<br />
O nel suo vertice. L’angolo tra queste ed il piano orizzontale passante<br />
per O è detto depressione geometrica (o vera) dell' orizzonte e rappresenta<br />
anche il raggio dell' orizzonte geometrico, come ben risulta in figura<br />
4.3. Dal triangolo THO si ha:
Figura 4.3 – Orizzonte geometrico<br />
tan I<br />
=<br />
=<br />
⎛<br />
⎜1<br />
+<br />
⎝<br />
HO<br />
HT<br />
e<br />
R<br />
⎞<br />
⎟<br />
⎠<br />
2<br />
=<br />
87<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
( R + e)<br />
− 1 =<br />
R<br />
2<br />
2<br />
⎛ e ⎞<br />
⎜ ⎟<br />
⎝ R ⎠<br />
− R<br />
2<br />
e<br />
Trascurando nella 4.7 il termine del secondo ordine si ottiene:<br />
2<br />
R<br />
Per la piccolezza dell’angolo I può ritenersi:<br />
ed essendo<br />
2<br />
+<br />
2<br />
2e<br />
R<br />
(4.7)<br />
2e<br />
tan I = (4.8)<br />
R<br />
tan I = sin I = I'sin1'<br />
, I'=<br />
sin1' = 0.<br />
00029 , R ≅<br />
1<br />
sin1'<br />
6371000 [ m]<br />
si ottiene l’espressione finale dell’orizzonte geometrico:<br />
2<br />
R<br />
i = 1.<br />
93 e<br />
(4.9)<br />
e
88<br />
MARIO VULTAGGIO<br />
con la depressione vera I espressa in primi d' arco e l' elevazione e in<br />
metri; di conseguenza, il raggio d dell' orizzonte geometrico, espresso<br />
in miglia, risulta:<br />
[ miglia]<br />
con l' elevazione e espressa sempre in metri.<br />
d = 1. 93 e<br />
(4.10)<br />
4.3- Orizzonte marino<br />
Per la presenza dell'atmosfera, il raggio luminoso proveniente da un<br />
punto della superficie terrestre, ad esempio dal punto A della figura 4.4,<br />
giunge all'occhio dell’osservatore O senza essere fermato da questa, solamente<br />
se l’angolo tra la tangente a alla curva di rifrazione geodetica<br />
nel punto A ed il raggio terrestre relativo allo stesso punto è maggiore di<br />
90°. Quando quest' angolo è proprio uguale a 90°, nel punto B della figura,<br />
questo punto rappresenta il limite di visibilità ed è visto<br />
dall’osservatore provenire secondo la direzione della tangente t alla<br />
curva di rifrazione nel punto O. L'angolo che questa tangente forma col<br />
piano orizzontale passante per O è detto depressione apparente e viene<br />
indicato con la lettera i.<br />
Figura 4.4 – Orizzonte marino<br />
Considerando in tutte le direzioni identiche condizioni fisiche degli strati<br />
d’aria prossimi alla superficie terrestre, la circonferenza minore c’
89<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
passante per tutti i punti analoghi al punto B, di raggio sferico CB (CB<br />
= D), rappresenta l' orizzonte marino apparente.<br />
In figura 4.5, che non rispetta le proporzioni, S rappresenta il centro<br />
dell’arco di curva di rifrazione geodetica BO considerata circolare, il cui<br />
raggio è dato dalla (4.4), per cui SB = ρ . Dal triangolo STC, indicando<br />
con b la distanza SC, ed applicando il teorema di Carnot, si può scrivere:<br />
Ricordando che:<br />
tiene:<br />
da cui:<br />
b<br />
=<br />
2 2<br />
= ( ρ − R)<br />
+ R − 2(<br />
ρ − R)<br />
Rcos(<br />
π − D)<br />
2 2<br />
( ρ − R)<br />
+ R + 2(<br />
ρ − R)<br />
Rcos<br />
D<br />
2<br />
Figura 4.5 – Orizzonte marino<br />
=<br />
(4.11)<br />
2 D<br />
cos D = 1−<br />
2sin<br />
,sostituendo e semplificando si ot-<br />
2<br />
2<br />
ρ − b<br />
2<br />
= 4<br />
( ρ − R)<br />
Rsin<br />
( ρ − b)(<br />
ρ + b)<br />
= 4(<br />
ρ − R)<br />
sin 2<br />
D<br />
=<br />
2<br />
2<br />
D<br />
2<br />
Rsin<br />
( ρ − b)(<br />
ρ + b)<br />
4R(<br />
ρ − R)<br />
2<br />
D<br />
2
Con sufficiente approssimazione si può porre:<br />
ρ + b = 2 ρ,<br />
ρ - b = e, ρ = 7R<br />
per cui si può ottenere la seguente relazione:<br />
sin 2<br />
90<br />
MARIO VULTAGGIO<br />
D 7 e<br />
= (4.12)<br />
2 12 R<br />
che per la piccolezza dell' angolo D può porsi ancora<br />
per cui la (4.12) diventa:<br />
sin<br />
2<br />
D<br />
=<br />
2<br />
( D')<br />
4<br />
2<br />
sin<br />
2<br />
1'<br />
1 7<br />
D' = e = 2.<br />
08 e<br />
(4.13)<br />
sin1'<br />
3R<br />
con D raggio dell'orizzonte marino espresso in miglia ed e l'elevazione<br />
dell’occhio dell’osservatore in metri. Sempre dalla figura 4.5 risulta:<br />
TCˆ<br />
S = TOˆ<br />
S + CSˆ<br />
O e per essere l’angolo CSO ˆ molto piccolo, può ritenersi<br />
TCˆ<br />
S ≅ TOˆ<br />
S .Ma l’angolo TOˆ S è uguale ad i (angoli i cui lati sono<br />
tra loro perpendicolari), per cui: T Cˆ<br />
S = i . Dal triangolo STC per la relazione<br />
dei seni si ha:<br />
sinTCˆ<br />
S ρ − R sin i 6<br />
= = =<br />
sin STˆ<br />
C b sin D 7<br />
per essere<br />
ρ = 7R, b ≅ ρ ≅ 7R e sin i = i'<br />
sin1'<br />
, sin D = D'<br />
sin1'<br />
si ottiene la seguente relazione:<br />
i = 1.<br />
78 e<br />
(4.14)<br />
con i in primi ed e in metri.<br />
Il valore di i fornito dalla (4.14) è noto quale depressione media apparente<br />
dell’orizzonte, perchè corrisponde a condizioni fisiche medie<br />
dei bassi strati atmosferici attraversati dai raggi luminosi provenienti<br />
dalla superficie marina, per le quali il coefficiente Ko = 0.16 può ritenersi<br />
abbastanza attendibile; lontano dalle predette condizioni il valore di i
91<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
può risultare notevolmente diverso da quello dato dalla (4.9); valori anormali<br />
si hanno più frequentemente con calma assoluta di vento (fenomeno<br />
particolarmente presente in alcuni mari, quali il Mar Rosso, il<br />
Golfo Persico ed il Mare del Nord). Alcuni, poi, fanno dipendere il coefficiente<br />
di rifrazione geodetica dalla differenza fra le temperature dei<br />
bassi strati dell'aria e dell'acqua marina superficiale. Infine, l’ipotesi<br />
della uniformità in azimut delle condizioni fisiche dei bassi strati<br />
dell’atmosfera può essere accettata soltanto se si è in mare aperto, lontani<br />
dalle coste, risultando di conseguenza circolare l' orizzonte marino<br />
o apparente. Quanto fin qui detto sulla depressione dell’orizzonte i è<br />
molto importante, dato che le altezze degli astri vengono misurate da<br />
bordo rispetto all'orizzonte marino, per essere poi riferite al piano orizzontale<br />
passante per l' occhio dell' osservatore. Un valore anormale di i<br />
inficia di conseguenza la precisione della posizione astronomica calcolata.<br />
Tavole relative alle relazioni (4.13) e (4.14) sono riportate nelle varie<br />
pubblicazioni nautiche in dotazione a bordo (v. Tavole Nautiche<br />
dell’Istituto Idrografico).<br />
4.4-Orizzonte radar<br />
Come già accennato, anche le onde radio subiscono rifrazione lungo il<br />
loro percorso e per quelle utilizzate dal radar si può considerare Ko=<br />
0.25; tenendo poi presenti le modeste distanze in gioco, può considerarsi<br />
valido tutto quanto fin qui esposto per le onde luminose; la (4.4) dà in<br />
questo caso ρ = 4R<br />
.<br />
Nella figura 4.6, il punto O rappresenta l’antenna del radar avente elevazione<br />
h sul livello medio del mare (dal punto C della figura) e la circonferenza<br />
minore c’ indica il limite della calotta sferica radar -visibile<br />
rappresentando quindi l’orizzonte radar. Dalla (4.6) sia ha:<br />
sin 2<br />
D 2h<br />
=<br />
2 3R<br />
che per considerazione già svolte precedentemente può essere espressa<br />
nel seguente modo:<br />
1 8<br />
D' = h = 2.<br />
22 h<br />
(4.15)<br />
sin1'<br />
3R
92<br />
MARIO VULTAGGIO<br />
con D, raggio dell’orizzonte radar, espresso in miglia e l'altezza h dell'<br />
antenna in metri.<br />
Figura 4.6 – Orizzonte radar<br />
4.5- Distanze con misure di angoli orizzontali<br />
Siano ρ 1 e ρ 2 (v. figura 4.7) i rilevamenti polari del punto A, misurati<br />
negli istanti tl e t2 dalla nave N, in moto con prora e velocità note; supponendo<br />
nulli gli angoli di deriva e di scarroccio (Pv = Rv). Queste misure<br />
angolari possono essere effettuate sia per mezzo dell’indicatore di<br />
angoli del PPI (Plan Position Indicator) del radar di bordo oppure con<br />
grafometro sistemato sul lato del ponte di comando di una nave. In entrambi<br />
i casi il tracciamento dei rilevamenti polari dell’oggetto osservato<br />
richiede la loro trasformazione da rilevamenti polari, riferiti al piano<br />
longitudinale della nave, a rilevamenti veri utilizzando la ben nota relazione:<br />
( ± ρ)<br />
Ril P +<br />
(4.16)<br />
v<br />
= v
P R<br />
v v<br />
Ν T<br />
d T<br />
ρ 2<br />
Ν 2<br />
ρ 2<br />
93<br />
m<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
1<br />
Figura 4.7 – Distanza con rilevamenti polari<br />
Noto il percorso m effettuato tra i due istanti:<br />
d<br />
ρ 1<br />
A<br />
( t t )<br />
m = v −<br />
è possibile calcolare la distanza d della nave dal punto A all' istante della<br />
misura del secondo rilevamento ed anche la minima distanza dallo<br />
stesso punto, detta distanza al traverso (dT) nave in NT da cui il punto A<br />
viene rilevato per ρ = 90°<br />
.<br />
Dal triangolo piano N1N2A, applicando la relazione dei seni, si ricava:<br />
( ) m<br />
d<br />
sin ρ1<br />
= (4.17)<br />
sin ρ 2 − ρ1<br />
e dal triangolo rettangolo N2NTA si ottiene:<br />
d T<br />
2<br />
1<br />
ρ 1<br />
Ν<br />
d<br />
sin ρ sin ρ<br />
= sin ρ 2 =<br />
(4.18)<br />
sin<br />
( ) m<br />
1 2<br />
ρ − ρ<br />
Se ρ 2 = 2ρ 1 , il triangolo N1N2A è isoscele e le relazioni (4.17) e (4.18)<br />
diventano rispettivamente:<br />
d = m , dT<br />
= msin<br />
ρ<br />
Con ρ 1 = 22. 5°<br />
, ρ 2 = 45°<br />
(metodo delle due quarte) si ha<br />
d = m,<br />
dT<br />
= 0,<br />
707m<br />
; con ρ 1 = 45° , ρ 2 = 90°<br />
(metodo del 45 e 90) si ha<br />
che dT= m; in questo secondo caso la minima distanza è uguale al per-<br />
2<br />
1<br />
2<br />
N
94<br />
MARIO VULTAGGIO<br />
corso effettuato tra gli istanti delle misure dei due rilevamenti, nota però<br />
solamente quando la nave è al traverso di A(NT).<br />
Indicando con mT il percorso da compiere per raggiungere NT a partire<br />
dall' istante della misura del secondo rilevamento polare, dal triangolo<br />
rettangolo N2 NT A si ricava:<br />
Dalla (4.17), ponendo ρ 2 − ρ1<br />
= Δρ<br />
si ha:<br />
mT = d cos ρ 2<br />
(4.19)<br />
m m<br />
sin Δ ρ = sin ρ1<br />
= sin ρ<br />
d d<br />
cosicché la variazione del rilevamento polare diminuisce al diminuire di<br />
ρ ed all’aumentare della distanza dal punto. Questa ultima proprietà<br />
suggerisce una procedura da seguire quando si osservano due misure<br />
simultanee: per evitare una significativa variazione dei rilevamenti fra<br />
due osservazioni consecutive occorre osservare sempre, come prima<br />
osservazione, l’oggetto più lontano e di angolo (ρ) più piccolo.<br />
La (4.18) puoi essere così trasformata:<br />
d<br />
m sin ρ sin ρ<br />
1 2<br />
T = =<br />
(4.20)<br />
sin ρ 2 cos ρ1<br />
− cos ρ 2 sin ρ1<br />
cot ρ1<br />
− cot ρ 2<br />
Ponendo nella (4.20)<br />
m<br />
1<br />
ρ 2 − cot ρ = si ha: dT = Km<br />
K<br />
cot 1<br />
per cui la distanza al traverso risulta uguale al prodotto di K per il percorso<br />
effettuato tra gli istanti delle misure dei due rilevamenti.<br />
E’ possibile trovare una serie di angoli polari ρ 1 , ρ 2,<br />
ρ3<br />
,..... ρ n tali che la<br />
differenza delle cotangenti di due di essi consecutivi sia uguale ad una<br />
1<br />
costante ; tale serie è chiamata serie di rilevamenti determinati o se-<br />
K<br />
rie di Troub. Si noti che per un dato valore di K sulla direzione della<br />
prua sono uguali i vari percorsi parziali relativi a due rilevamenti successivi<br />
della serie.<br />
Se i rilevamenti ρ 1, ρ 2 di figura 4.7 sono rilevamenti della serie, si ricava:
T<br />
T<br />
95<br />
i<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
m = d cot ρ = Kmcot<br />
ρ<br />
(4.21)<br />
con i l’indice del generico rilevamento polare della serie; fissato il valore<br />
di K si possono ricavare i valori degli angoli polari della serie;di seguito<br />
sono elencati i rilevamenti polari della serie di Troub per K = 1 e<br />
K = 2. Nelle tabelle I e II ed in corrispondenza di ciascun rilevamento è<br />
riportato sia il valore della cotangente ed la distanza ancora da effettuare<br />
per giungere al traverso del punto rilevato espressa in termini del percorso<br />
m fra due rilevamenti polari successivi della serie.<br />
Scafo affondato<br />
N T<br />
N 4<br />
i<br />
ρ 3<br />
N 3<br />
ρ 2<br />
Secca<br />
N 2<br />
Figura 4.8 – Serie di rilevamenti polari<br />
Tabella I e II – Rilevamenti polari della serie di Troub per K=1 e K=2.<br />
K=1<br />
ρ cotan mT<br />
18.5° 3 3m<br />
26.5° 2 2m<br />
45° 1 M<br />
90° 0 0<br />
ρ 4<br />
ρ 1<br />
N 1<br />
K=2<br />
ρ cotan mT<br />
18.5° 3 6m<br />
22° 2.5 5m<br />
26.5° 2 4m<br />
34° 1.5 3m<br />
45° 1 2m<br />
63° 0.5 m<br />
90° 0 0
96<br />
MARIO VULTAGGIO<br />
Si consideri, ora, la misura dei due rilevamenti polari 1 2 ,ρ ρ in presenza<br />
di una corrente nota che allontana la nave dalla costa (v. figura 4.9).<br />
R v<br />
Pv<br />
Scafo affondato<br />
N T<br />
Corrente<br />
A<br />
ρ 4<br />
N 4<br />
ρ 3<br />
N 3<br />
ρ 2<br />
Secca<br />
Figura 4.9 – Serie di rilevamenti polari con navigazione in presenza<br />
di corrente<br />
La distanza d dal punto A all'istante del secondo rilevamento è data in<br />
questo caso da:<br />
d<br />
2<br />
( )<br />
( ) m<br />
ρ1<br />
+ lder<br />
ρ − ρ<br />
2<br />
1<br />
N 2<br />
ρ 1<br />
N 1<br />
sin<br />
= (4.22)<br />
sin<br />
e la minima distanza dallo stesso punto, segmento di perpendicolare abbassata<br />
da A sulla direzione della rotta, indicata ancora con dT risulta<br />
d d sin ρ + l , relazione che per la (4.17) diventa:<br />
T<br />
= 2<br />
( )<br />
der<br />
d<br />
T<br />
( ρ1<br />
+ lder<br />
) sin(<br />
ρ 2 + lder<br />
)<br />
sin(<br />
ρ − ρ )<br />
sin<br />
= m<br />
(4.23)<br />
Nel punto NT di minima distanza il rilevamento polare di A risulta ugua-<br />
90 ° − l . Il percorso N2NT, indicato lo stesso con mT è dato da:<br />
le der<br />
T<br />
2<br />
1<br />
( l )<br />
m d cos ρ +<br />
(4.24)<br />
= 2<br />
Se la corrente avvicina la nave alla costa l' angolo di deriva lder va sottratto<br />
nelle relazioni (4.22), (4.23), (4.24).<br />
der
97<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
4.6- Altre utilizzazioni dei rilevamenti polari<br />
I rilevamenti polari, oltre che per determinazioni di distanze, vengono<br />
impiegati anche per:<br />
• ottenere il rilevamento rispetto alla linea meridiana (l’azimut);<br />
• orientare la nave secondo una data prora magnetica;<br />
• passare al traverso di un punto della costa ad una predeterminata<br />
distanza;<br />
• individuare la presenza di una corrente e determinare l' angolo d i<br />
deriva.<br />
Nota la prora vera, il rilevamento rispetto alla direzione del nord (cioè<br />
l'azimut) è dato dalla prima delle relazioni (3.10) oppure dalla (4.16):<br />
Ril v<br />
= Pv + ( ± ρ )<br />
considerata algebrica quando ρ è misurato nel sistema semicircolare.<br />
Nell' effettuare la compensazione delle bussole magnetiche occorre<br />
orientare la nave, situata in una posizione nota, secondo date prore magnetiche.<br />
Conoscendo il rilevamento magnetico di un punto noto della<br />
costa rispetto alla posizione della nave, dalla relazione (4.16):<br />
ρ = Rilm − Pm<br />
(4.25)<br />
si ricava il rilevamento polare secondo il quale deve essere rilevato al<br />
grafometro il punto della costa per fare assumere alla nave la prora magnetica<br />
stabilita. Basta, pertanto, orientare l' alidada del grafometro per<br />
il rilevamento polare ottenuto e ruotare la nave fino a collimare il punto.<br />
Figura 4.10 – Rilevamento polare
98<br />
MARIO VULTAGGIO<br />
Il rilevamento magnetico del punto si ottiene togliendo algebricamente<br />
la declinazione magnetica dal rilevamento vero dedotto dalla carta nautica.<br />
S' immagini ora di conoscere in un dato istante la distanza d della nave<br />
N (vedi fig. 4.10) dal punto noto A della costa. Stabilendo di voler<br />
passare alla distanza dT (distanza di sicurezza), è possibile ottenere dal<br />
triangolo ANNT il rilevamento polare del punto che definisce in N la<br />
prora da seguire:<br />
sin ρ =<br />
(4.26)<br />
d<br />
per cui la detta prora sarà poi ottenuta dalla differenza algebrica<br />
P b = Rilb<br />
− ρ dopo aver misurato il Rilb alla normale.<br />
Per individuare la presenza di una corrente e determinare l’angolo di<br />
deriva occorrono almeno tre rilevamenti successivi della serie di Troub.<br />
Dalla figura 4.11 si nota che se c’è deriva (PV ≠ RV), i percorsi parziali<br />
tra gli istanti di misura dei successivi rilevamenti della serie non sono<br />
uguali e precisamente vanno diminuendo se la corrente è diretta verso la<br />
costa, aumentando se diretta verso il largo. Ciò dal fatto che i rileva-<br />
' ' '<br />
menti ρ 2 , ρ3<br />
, ρ 4 , sono misurati nei punti N 2,<br />
N3,<br />
N4,......<br />
, della rotta vera<br />
'<br />
''<br />
''<br />
''<br />
R V (corrente diretta verso la costa.) e nei punti N 2 , N 3 , N 4 ,..... della rotta<br />
RV (corrente diretta verso il largo). Pertanto, detti Δ t1, Δt2<br />
gli intervalli<br />
di tempo rispettivamente tra gli istanti di misura di ρ 1, ρ 2 e ρ3, ρ 4 si<br />
possono verificare tre casi:<br />
• t1 = Δt2<br />
Δ : non esiste corrente oppure questa è diretta per prua o<br />
per poppa;<br />
Δ t1 > Δt<br />
: la corrente è diretta verso la costa o verso il punto osservato;<br />
Δ t1 < Δt<br />
la corrente è diretta verso il largo o allontana la nave<br />
dall’oggetto osservato.<br />
• 2<br />
• 2<br />
d T
N1<br />
N’ 2<br />
N2 N’’ 2<br />
N’’ 3<br />
N’ 3<br />
N 3<br />
N’’<br />
4<br />
99<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
N’ 4<br />
N 4<br />
A<br />
R’’ v<br />
Figura 4.11 – Rilevamenti polari<br />
I casi contemplati negli ultimi due punti si ottengono da considerazioni<br />
geometriche procedendo al calcolo della deriva e velocità effettiva della<br />
nave costante.<br />
' ' '<br />
Dai due triangoli AN 1N 2 e AN 2 N 3 , caso di corrente verso la costa, si<br />
ricava per la relazione dei seni:<br />
( ρ1<br />
− lder<br />
)<br />
( ρ − ρ )<br />
' ' sin<br />
AN2<br />
= N1N<br />
2<br />
sin 2 1<br />
per cui dalla uguaglianza risulta:<br />
sin<br />
sin<br />
( ρ1<br />
− lder<br />
)<br />
( ρ − ρ )<br />
2<br />
1<br />
sin<br />
•<br />
sin<br />
e<br />
AN<br />
'<br />
2<br />
= N<br />
'<br />
2<br />
N<br />
' '<br />
( ρ3<br />
− ρ2<br />
) N2<br />
N3<br />
VΔt2<br />
= =<br />
( ρ ) '<br />
3 − lder<br />
N N VΔt1<br />
1<br />
2<br />
'<br />
3<br />
R v<br />
R’ v<br />
sin<br />
sin<br />
P v<br />
( ρ3<br />
− lder<br />
)<br />
( ρ − ρ )<br />
3<br />
2<br />
(4.27)<br />
con V la velocità effettiva della nave. Il primo membro, dopo aver sviluppato<br />
e diviso numeratore e denominatore per<br />
e considerato che<br />
si ha:<br />
sin ρ sin ρ sin ρ sin l<br />
1<br />
1<br />
2<br />
2<br />
cot ρ − cot ρ = cot ρ − cot ρ<br />
3<br />
2<br />
dr<br />
3
cot l<br />
cot l<br />
der<br />
der<br />
− cot ρ1<br />
Δt<br />
==<br />
− cot ρ Δt<br />
Scomponendo:<br />
cotl<br />
der − cot ρ1<br />
− ( cotl<br />
der − cot ρ3<br />
) Δt2<br />
− Δt1<br />
cot ρ3<br />
− cot ρ1<br />
= =<br />
cotl<br />
der − cot ρ3<br />
Δt1<br />
cotl<br />
der − cot ρ3<br />
ed essendo: ρ − cot ρ = 1 facilmente si ricava:<br />
cot 3<br />
1<br />
Δt<br />
cot ρ<br />
100<br />
3<br />
2<br />
1<br />
MARIO VULTAGGIO<br />
(4.28)<br />
(4.29)<br />
1<br />
lder = + cot 3<br />
(4.30)<br />
Δt2<br />
− Δt1<br />
''<br />
''<br />
''<br />
Seguendo un analogo procedimento per i triangoli AN 1N 2 e AN 2 N3<br />
caso<br />
della corrente diretta verso il largo, si ricava:<br />
Δt<br />
cot ρ<br />
1 lder = − cot 3<br />
(4.31)<br />
Δt2<br />
− Δt1<br />
Evidentemente in quest’ultimo argomento trattato sono considerati costanti<br />
i parametri dei moti della nave e della corrente.<br />
4.7- Distanze con misure di angoli verticali<br />
Gli oggetti rilevati ed i punti notevoli riconosciuti dal navigante possono<br />
essere utilizzati per determinare la loro distanza dall’osservatore<br />
stesso. La figura. 4.12 rappresenta un possibile scenario all’interno di<br />
un orizzonte associato ad un osservatore O, avente elevazione e sul livello<br />
del mare; in essa sono rappresentati oggetti (oggetti che si trovano<br />
all’interno dell’orizzonte: navi,boe, isole, ecc); lo scenario, inoltre, include<br />
al limite del suo orizzonte apparente, l' estremità B dell'oggetto K<br />
(per esempio, un faro) di nota altezza h.<br />
In questa situazione la traiettoria dei raggi luminosi che giungono in<br />
O provenienti da K riesce tangente alla superficie terrestre nel punto B,<br />
punto limite per gli orizzonti apparenti di O e di K; di qui la distanza<br />
dell'oggetto K dall' osservatore è data da d = CA , somma dei raggi dei<br />
due orizzonti: d 1 = CE = CB e d = BA ; per la (4.13)<br />
con e ed h in metri e d in miglia.<br />
2<br />
( e h )<br />
d = 2 , 08 +<br />
(4.32)
101<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
Figura 4.12 - Distanza di oggetti interni ed esterni all’orizzonte<br />
dell’osservatore O<br />
In pratica l’estremità B, per essere ben vista da O, deve essere un pò alta<br />
sull' orizzonte; ciò comporta che l’oggetto K è visto da O ad una distanza<br />
d’ leggermente inferiore a d, ottenuta ponendo nella (4.32) il coefficiente<br />
2.04 al posto del coefficiente 2.08:<br />
( e h )<br />
'<br />
d = 2,<br />
04 +<br />
(4.33)<br />
La fig. 4.12 dà anche l' idea della distanza alla quale un oggetto di nota<br />
elevazione, per esempio la costa, viene avvistato da un radar avente<br />
l'antenna ad una determinata altezza sul livello medio del mare. Considerando<br />
nel punto O l'antenna e tenendo presente la (4.15), la distanza<br />
CD è data da:<br />
( e h )<br />
d = 2 . 22 +<br />
(4.34)<br />
con e ed h le altezze in metri sul livello del mare rispettivamente dell'<br />
antenna e dell' oggetto D; in questo caso, la distanza d (in miglia) è nota<br />
quale portata geografica del radar.<br />
Il valore fornito dalla (4.34) è soltanto indicativo per aver assunto un<br />
coefficiente medio di rifrazione per le radioonde emesse dal radar, coefficiente<br />
che, com’è noto, dipende dalle condizioni fisiche degli strati di<br />
aria interessati alla propagazione radioelettrica ed in modo speciale dal<br />
gradiente termico. Inoltre, la portata d aumenta con la temperatura dell'aria<br />
più elevata di quella del mare; a grandi distanze essa risente delle
102<br />
MARIO VULTAGGIO<br />
prestazioni dell'apparato, della natura del bersaglio e della potenza emessa.<br />
Caso particolare si ha quando l’oggetto (v. figura. 4.13) F di nota altezza<br />
h, è situato tutto dentro l' orizzonte apparente dell' osservatore O.<br />
In questo caso l’osservatore può misurare la sua altezza angolare per<br />
mezzo di un angolo verticale α per mezzo di un sestante. In questa situazione,<br />
per semplicità di calcolo, si considera piana la superficie terrestre<br />
nell'intorno dell' oggetto, associato al segmento AF e rettilineo il<br />
percorso dei raggi luminosi. La misura effettuata individua l' arco di circonferenza<br />
FOA da tutti i punti del quale l'oggetto F viene misurato secondo<br />
l' angolo α (v. figura 4.14).<br />
Figura 4.13 - Distanza di oggetto interno all’orizzonte<br />
dell’osservatore O<br />
Se si trascura, poi, l'elevazione e dell’occhio dell' osservatore, questi<br />
deve essere considerato nel punto C1 per cui la sua distanza dall' oggetto<br />
è data da:<br />
C A = d = hcotα<br />
(4.35)<br />
1<br />
Figura 4.14 - Distanza di oggetto interno all’orizzonte<br />
dell’osservatore O
103<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
In realtà, considerando l’elevazione e (occhio in O), l' esatta distanza<br />
dell' osservatore dall’oggetto è data dal segmento CA, più grande di d;<br />
1'errore è rappresentato dal segmento CC1.<br />
Figura 4.15 -<br />
Nella fig. 4.15 i segmenti BD e CD sono rispettivamente paralleli ai<br />
segmenti CA ed AB: il quadrilatero CABD è un rettangolo. Essendo CC2<br />
e CA segmenti secanti alla circonferenza condotti dal punto esterno C<br />
ed i segmenti CO e CC1,. parti esterne di essi, per un noto teorema di<br />
geometria si ha:<br />
( h e)<br />
CC1 CC2<br />
e −<br />
= , CC1<br />
=<br />
CO CA<br />
CA<br />
In pratica CA> h, donde il rapporto (h-e)/CA è minore dell’unità; di qui<br />
l’errore CC1 risulta minore dell’elevazione e. Volendo esprimere d in<br />
miglia ed h. in metri, la (4.35) diventa:<br />
hcotα<br />
d =<br />
1852<br />
Infine si può presentare il seguente caso (v. figura 4.16): l'osservatore<br />
con occhio B nel punto O, con elevazione e sul livello medio del mare,<br />
misura l' angolo verticale α relativo alla parte del faro rappresentato in<br />
figura, di nota altezza h, che compare al di sopra dell’orizzonte apparente.
104<br />
MARIO VULTAGGIO<br />
Figura 4.16 – Distanza di uno oggetto esterno all’orizzonte<br />
dell’osservatore O<br />
Evidentemente l' oggetto è oltre l'orizzonte e l' angolo misurato si riferisce<br />
alle traiettorie dei raggi luminosi provenienti dai suoi punti B e D;<br />
quella proveniente da D riesce tangente in E all'orizzonte apparente dell'<br />
osservatore. La distanza D=CA fra l' osservatore e la base dell' oggetto è<br />
data da formule che richiedono lunghe e laboriose dimostrazioni; si riporta<br />
qui quella proposta dall’Istituto Idrografico:<br />
D =<br />
( h − e)<br />
cot ( − i)<br />
( 1 ko<br />
) ⎤<br />
⎥⎦<br />
⎡ d −<br />
⎢ α +<br />
(4.25)<br />
⎣ 2R<br />
sin1'<br />
con i la depressione apparente dell' orizzonte, d la distanza dell' orizzonte<br />
marino, ko il coefficiente medio di rifrazione geodetica, R il raggio<br />
terrestre.<br />
Con le relazioni (4.22), (4.23), (4.24) e (4.25) sono compilate delle tabelle<br />
inserite nelle pubblicazioni nautiche in dotazione sulle navi, quali,<br />
ad esempio, le "Tavole Nautiche". In queste la tabella relativa all’ ultima<br />
relazione citata fornisce la distanza D in miglia in funzione dell' argomento<br />
orizzontale (h-e) in metri e delle argomento verticale (α -i) in<br />
gradi e primi. Nel caso che α è minore di i bisogna entrare con l' argomento<br />
(i -a); il valore ottenuto aumentato del doppio del detto argomento<br />
fornisce la distanza desiderata.<br />
APPENDICE A.7
APPENDICE A<br />
105<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
LA CURVA D’AZIMUT IN NAVIGAZIONE COSTIERA<br />
A.4.1 - Considerazioni generali.<br />
La determinazione della posizione di un mobile trova la sua soluzione<br />
nell’impiego dei luoghi di posizione; essi non sono altro che luoghi ge-<br />
ometrici di punti che godono tutti di una determinata prefissata proprie-<br />
tà. In senso nautico occorre aggiungere che tale proprietà deve poter es-<br />
sere ottenuta per mezzo di misure.<br />
Trovarsi su un luogo di posizione significa dunque constatare con<br />
una misura la proprietà di cui essa gode ed inversamente l’aver constatato<br />
con una misura questa proprietà significa trovarsi su uno degli infiniti<br />
punti di cui è costituito il luogo di posizione. E’ importante osservare<br />
che i punti che costituiscono il luogo di posizione godono tutti della<br />
stessa proprietà e quindi la determinazione di un solo luogo di posizione<br />
non è sufficiente a determinare la posizione del mobile.<br />
I luoghi di posizione usati in navigazione sono:<br />
• luogo di posizione di uguale azimut (curva d’azimut e semiretta<br />
di rilevamento);<br />
• luogo di posizione di uguale differenza d’azimut (cerchio capace);<br />
• luogo di posizione di uguale distanza (cerchio di distanza);<br />
• luogo di posizione di uguale profondità (curva batimetrica).<br />
Prima di procedere alla descrizione dei metodi da usare per determi-<br />
nare la posizione in navigazione costiera occorre prima studiare i luoghi<br />
di posizione nella loro forma generale e successivamente definire la loro<br />
forma ed espressione analitica nell’intorno dell’oggetto osservato.
A.4.2 - Equazione della curva d’azimut<br />
106<br />
MARIO VULTAGGIO<br />
Per studiare la curva d’azimut occorre prima definire l’azimut. Si definisce<br />
l’azimut di un oggetto l’angolo dietro formato fra il piano meridiano<br />
contenente la verticale e il piano verticale contenente l’oggetto<br />
osservato. Esso, normalmente è indicato con la lettera Az e si conta da<br />
0° a 360° nel senso orario oppure come angolo azimutale Z contato da<br />
0° a 180° nel senso orario ed antiorario.<br />
Quando si misura da un mobile, la cui posizione non è nota, l’azimut di<br />
uno oggetto di coordinate note, sulla terra rappresentativa si genera una<br />
curva i cui punti godono tutti della proprietà di osservare l’oggetto sotto<br />
lo stesso azimut.<br />
Consideriamo il triangolo sferico (v. figura 1) i cui vertici siano Pe (Polo<br />
elevato- omonimo all’osservatore), O l’osservatore ed A l’oggetto osservato.<br />
Sia Z, contato da 0° a 180° l’azimut osservato ed i cui lati ed<br />
angoli sono di significato noto.<br />
L’equazione generale della curva d’azimut si ricava applicando il teorema<br />
delle cotangenti ai seguenti quattro elementi consecutivi seguendo<br />
lo schema riportato in figura A.4.2:<br />
( 90 − φ ) sin(<br />
90 − φ ) = cos(<br />
90 − φ ) cos Δλ<br />
+ sinΔ<br />
cot gZ<br />
cot g A λ<br />
che può essere scritta semplicemente nella sua forma generale:<br />
Figura A.4.1 – Sfera rappresentativa e triangolo sferico associato<br />
alla misura Z<br />
tan A<br />
φ cosφ<br />
= sinφ<br />
cos Δλ<br />
+ sinΔλ<br />
cot gZ (A.4.1)
107<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
Figura A.4.2 - Applicazione della formula di Vieta<br />
Dimostriamo che la curva d’azimut gode delle seguenti proprietà:<br />
• Contiene l’osservatore (curva continua);<br />
• Passa per il polo omonimo all’osservatore;<br />
• Passa per l’oggetto osservato.<br />
La prima proprietà si ricava direttamente dall’equazione (A.4.1) dato<br />
che essa è rappresentata da funzione continua e derivabile; le restanti<br />
proprietà si dimostrano applicando l’equazione fondamentale della trigonometria<br />
sferica al lato sferico O1A contenente l’oggetto osservato di<br />
figura A.4.3.
Figura A.4.3 – Triangolo ortodromico<br />
sin A<br />
108<br />
MARIO VULTAGGIO<br />
φ = sinφ<br />
cos D + cosφ<br />
sin Dcos<br />
Z<br />
(A.4.2)<br />
Considerando D=0 , si ottiene che φ = φ A ; questa condizione conferma<br />
la proprietà della curva di passare per l’oggetto osservato (A). Inoltre,<br />
per φ = 90°<br />
si ha, sempre dalla (A.4.2)<br />
A<br />
( 90°<br />
− φ A ) = cos D , D = 90°<br />
A<br />
sinφ = cos D , cos<br />
−φ<br />
per cui la curva passa anche per il polo elevato Pe. La curva d’azimut<br />
gode di altre proprietà che comunque per la sua applicazione in navigazione<br />
costiera non sono importanti e non inficiano la sua applicazione.<br />
A.4.3 - Semiretta di rilevamento (Rilevamento)<br />
Sia α A l’angolo che la curva d’azimut forma con il meridiano del triangolo<br />
sferico definito dalla curva d’azimut nel punto A; considerando il<br />
triangolo sferico infinitesimo nel punto A (figura A.4.4) si ricava la relazione<br />
trigonometrica che permette di definire il valore di α A :<br />
dλ<br />
dλ cosφ A = dφ<br />
tanα<br />
A tanα<br />
A = cosφ<br />
A (A.4.3)<br />
dφ<br />
nella quale tan A<br />
α , limitatamente all’intorno di A, può essere considerato<br />
il coefficiente angolare della retta tangente alla curva d’azimut. Infatti,<br />
considerando che un generico punto della curva, in prossimità di A, ha<br />
coordinate:
φ = φ − φ , λ = λ − dλ<br />
A<br />
d A<br />
109<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
si applica la linearizzazione del luogo di posizione derivando<br />
l’equazione della curva d’azimut (A.4.1) rispetto alla latitudine φ :<br />
Figura A.4.4 – Curva d’Azimut e triangolo sferico in prossimità<br />
dell’oggetto osservato<br />
⎛ dλ<br />
⎞<br />
⎛ dλ<br />
⎞<br />
− tanφ<br />
Asinφ<br />
= cosφ<br />
cosΔλ<br />
− sinΔλsinφ⎜<br />
− ⎟ + cosΔλ<br />
cot gZ⎜<br />
− ⎟<br />
⎝ dφ<br />
⎠<br />
⎝ dφ<br />
⎠<br />
che può essere scritta nel seguente modo:<br />
sinφ<br />
Asinφ<br />
+ cosφ<br />
A cosφ<br />
cosΔλ<br />
− cos Z cosΔλ<br />
+ sinZsinΔλsinφ<br />
⎛ dλ<br />
⎞<br />
−<br />
=<br />
⎜ ⎟<br />
cosφ<br />
A<br />
sinZ<br />
⎝ dφ<br />
⎠<br />
ed applicando al numeratore del primo membro la relazione fondamentale<br />
della trigonometria sferica ed al numeratore del secondo<br />
membro la corrispondente relazione correlativa si ha:
cos D cos A ⎛ dλ<br />
⎞<br />
− = ⎜ ⎟<br />
cosφ<br />
A sin Z ⎝ dφ<br />
⎠<br />
dλ<br />
cos D sin Z cosφ<br />
= tanα<br />
A = −<br />
dφ<br />
cosφ<br />
cos A<br />
110<br />
A<br />
MARIO VULTAGGIO<br />
(A.4.4)<br />
che si semplifica ulteriormente, applicando al triangolo sferico il teorema<br />
dei seni:<br />
cosφ<br />
sin A<br />
cosφ<br />
sinZcosφ<br />
A = , sinA =<br />
(A.4.5)<br />
sin Z<br />
cosφ<br />
A<br />
la cui sostituzione nella (A.4.4) fornisce l’equazione dell’angolo α A<br />
in funzione di elementi del triangolo sferico associato alla curva<br />
d’azimut di angolo Z:<br />
⎧ tanα<br />
A = −cos<br />
Dtan<br />
A<br />
⎪<br />
⎨D<br />
= 0 , tanα<br />
0 = −tan<br />
A = tan( 180 − A<br />
⎪<br />
⎩α<br />
0 = 180°<br />
− Ao<br />
o<br />
)<br />
(A.4.6)<br />
Questa ultima condizione associa il valore di α A all’angolo A del<br />
triangolo sferico per D=0; occorre allora stabilire una relazione che<br />
fornisce A in termini di Z.<br />
Applicando, allora, la relazione di Vieta al lato di A si ha:<br />
e per D=0 si ha:<br />
tan A<br />
φ sin D<br />
=<br />
cos Dcos<br />
0 = cos Ao<br />
+ sin Ao<br />
cot gZ<br />
tan Z = tan( 180°<br />
− A )<br />
o<br />
,<br />
A +<br />
tan A<br />
sin Acot<br />
o<br />
gZ<br />
= −tan<br />
Z<br />
(A.4.7)<br />
Il confronto della (A.4.6) con la (A.4.7) fornisce la seguente relazione:<br />
α Z<br />
(A.4.8)<br />
o =<br />
proprietà importante perché stabilisce che la curva d’azimut nel punto<br />
A forma un angolo con il meridiano l’angolo misurato Z.
A.4.4 - Equazione della semiretta di rilevamento<br />
111<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
Si consideri l’equazione della curva d’azimut ed un punto di coordinate<br />
molto prossimo all’oggetto osservato di coordinate:<br />
( φ λ)<br />
, A( φ , λ ) , per cui O(<br />
φ Δφ<br />
λ − Δλ)<br />
O ,<br />
, A<br />
tan A<br />
A<br />
A − A<br />
φ cosφ<br />
= sinφ<br />
cos Δλ<br />
+ sinΔλ<br />
cot gZ<br />
Sostituendo le coordinate di O, sviluppando in serie ed arrestandosi<br />
al termine del primo ordine si ha:<br />
A<br />
[ cosφ<br />
+ Δφ<br />
φ ] = [ sinφ<br />
− Δφ<br />
cosφ<br />
] cos Δλ<br />
+ sin cot gZ<br />
tanφ Δλ<br />
A<br />
sin A<br />
A<br />
A<br />
sviluppando ulteriormente si ha:<br />
2<br />
2<br />
3<br />
sin φ A<br />
⎡ Δλ<br />
⎤<br />
⎡ Δλ<br />
⎤<br />
sinφ<br />
A + Δφ<br />
= sinφ<br />
A ⎢1<br />
+ ⎥ − cos φ AΔφ<br />
+ ⎢Δλ<br />
+ ⎥ cot gZ<br />
cosφ<br />
A<br />
⎣ 2 ⎦<br />
⎣ 6 ⎦<br />
dalla quale si ricava l’equazione della semiretta di rilevamento:<br />
A cot cosφ λ φ Δ = Δ<br />
L’equazione trovata rappresenta l’equazione di una retta sul piano<br />
passante per l’origine; infatti, essa può essere espressa per mezzo<br />
della seguente equazione:<br />
y = x cot gα<br />
Ricordando che nel piano di Mercatore le coordinate (x, y) hanno il<br />
seguente significato:<br />
A<br />
o<br />
gZ<br />
y = Δφ<br />
sec<br />
φ , x = Δλ<br />
, Z = α<br />
o
112<br />
MARIO VULTAGGIO<br />
e nel piano nautico le coordinate (x, y) hanno, invece, il significato<br />
di:<br />
y = Δφ<br />
, x = Δλ<br />
cosφ<br />
, Z = α<br />
si può tracciare la semiretta di rilevamento sia sul piano di Mercatore<br />
che sul piano nautico tracciando la semiretta passante per<br />
l’oggetto osservato che fa un angolo α con il meridiano uguale a Z.<br />
Figura A.4.5 – Semiretta di rilevamento per piano nautico e nel piano<br />
di Mercatore<br />
A<br />
o
APPENDICE B<br />
113<br />
CAPITOLO 4 – L’ORIZZONTE IN NAVIGAZIONE<br />
SERIE DI TRAUB IN PRESENZA DI CORRENTE<br />
B.4.1 – Sviluppo dell’espressione trigonometrica (4.27)<br />
' '<br />
sin(<br />
ρ1<br />
−α<br />
) sin(<br />
ρ3<br />
− ρ 2 ) N 2 N 3 vΔt2<br />
= =<br />
sin(<br />
ρ 2 − ρ1<br />
) sin(<br />
ρ3<br />
−α<br />
) N1N<br />
2 vΔt1<br />
[ sin ρ1<br />
cosα<br />
− cos ρ1<br />
sinα<br />
][ sin ρ3<br />
cos ρ 2 − cos ρ3<br />
sin ρ 2 ] Δt2<br />
=<br />
[ sin ρ 2 cos ρ1<br />
− cos ρ 23 sin ρ1][<br />
sin ρ3<br />
cosα<br />
− cos ρ3<br />
sinα<br />
] Δt1<br />
sin ρ cosα<br />
sin ρ cos ρ − sin ρ cosα<br />
cos ρ sin ρ − cos ρ sinα<br />
sin ρ cos ρ + cos ρ sinα<br />
cos ρ sin ρ<br />
1<br />
3<br />
2<br />
1<br />
3 2<br />
1<br />
3<br />
2<br />
1<br />
3 2<br />
sin ρ cos ρ sin ρ cosα<br />
− sin ρ cos ρ sin ρ sinα<br />
− cos ρ sin ρ sin ρ cosα<br />
+ cos ρ sin ρ cos ρ sinα<br />
2<br />
1<br />
3<br />
2<br />
1<br />
3<br />
Dividendo numeratore e denominatore per la seguente espressione trigonometrica<br />
sin ρ1 sin ρ 2 sin ρ3<br />
sinα<br />
si ha:<br />
cot ρ 2 cotα<br />
− cot ρ3<br />
cotα<br />
− cot ρ1<br />
cot ρ 2 + cot ρ1<br />
cot ρ3<br />
Δt<br />
=<br />
cot ρ cotα<br />
− cot ρ cot ρ − cot ρ cotα<br />
+ cot ρ cot ρ Δt<br />
1<br />
cotα<br />
cotα<br />
cot l<br />
cot l<br />
1<br />
3<br />
[ cot ρ 2 − cot ρ3<br />
] − cot ρ1[<br />
cot ρ 2 − cot ρ3<br />
] Δt2<br />
=<br />
[ cot ρ1<br />
− cot ρ 2 ] − cot ρ3<br />
[ cot ρ 2 − cot ρ1]<br />
Δt1<br />
dr<br />
dr<br />
− cot ρ1<br />
Δt<br />
=<br />
− cot ρ Δt<br />
3<br />
2<br />
1<br />
2<br />
2<br />
1<br />
2<br />
3<br />
3<br />
2<br />
2<br />
1<br />
1<br />
3
114<br />
MARIO VULTAGGIO













