

Relazione Finale I LEG
Relazione Finale I LEG
Relazione Finale I LEG

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Relazione</strong> <strong>Finale</strong> I <strong>LEG</strong><br />
23 Novembre 1997 – 15 Gennaio 1998<br />
Laboratorio di Navigazione e Meteorologia – I <strong>LEG</strong><br />
Mario Vultaggio (Responsabile), Prof. di Navigazione - IUN, Napoli<br />
Luigi Russo , Funzionario Tecnico - IUN, Napoli<br />
Gennaro Testa, Collaboratore Tecnico - IUN, Napoli<br />
Nel I <strong>LEG</strong> della XIII Spedizione italiana in Antartide, il laboratorio di navigazione e<br />
meteorologia ha assicura la disponibilità dei dati di posizione, profondità, dati meteorologici ed<br />
assistenza alla navigazione durante tutte le varie attività in mare espletate da tutte le UUOO a bordo<br />
della M/n Italica.<br />
Nel laboratorio di navigazione è stato installato ed utilizzato il sistema informatico distribuito<br />
di navigazione, in rete locale, denominato NET-NAV che consente, tra l’altro, di tenere conto delle<br />
esigenze differenziate di ciascun laboratorio: acquisizione degli eventi in tempo reale, collegamenti<br />
fra laboratori in rete, presentazione su monitor dei dati di navigazione e dei parametri<br />
meteorologici, dei dati cinematici per prefissati way point ed ausilio alla manovra della nave<br />
durante le misure.<br />
Servizi attivati.<br />
Sin dalla partenza da Lyttelton questa unità ha assistito l’attività del gruppo di idrologia<br />
con il lancio di XBT, misure di particellato, misure di rilievo ondametrico, carotaggi, box core,<br />
CTD + Rosette, Sub Bottom Profiler, HNT (Hunter Deep Tow Boomer), PHN, recupero ed<br />
ancoraggio dei mooring, assistenza alla navigazione in tutte le attività scientifiche.<br />
Di tutta questa attività, al termine di ogni giornata, i dati acquisiti sono stati elaborati e<br />
trasmessi ad ogni Unità Operativa, al Coordinatore Scientifico e al Capo Spedizione; per tutte le<br />
attività sono state elaboratele relative restituzioni cartografiche con programmi di cartografia<br />
nautica che integrano il sistema informatico.<br />
NET-NAV, inoltre, ha permesso l’accesso alla banca dati a tutti gli utenti che hanno<br />
utilizzato la rete informatica locale di bordo. Ad altri, invece, su loro richiesta, sono stati forniti, su<br />
supporto magnetico, sia le attività svolte che i dati meteorologici.<br />
Fra i servizi attivi vanno ricordati anche la possibilità degli utenti di accedere direttamente ai<br />
dati acquisiti da NET-NAV ed elaborali secondo le proprie esigenze.<br />
La relazione tecnica allegata illustra le caratteristiche informatiche di NETNAV, la sua<br />
organizzazione in rete locale come sistema integrato di navigazione.<br />
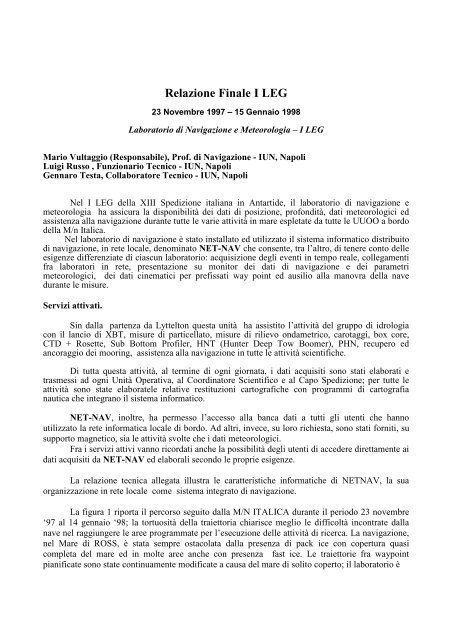
La figura 1 riporta il percorso seguito dalla M/N ITALICA durante il periodo 23 novembre<br />
‘97 al 14 gennaio ‘98; la tortuosità della traiettoria chiarisce meglio le difficoltà incontrate dalla<br />
nave nel raggiungere le aree programmate per l’esecuzione delle attività di ricerca. La navigazione,<br />
nel Mare di ROSS, è stata sempre ostacolata dalla presenza di pack ice con copertura quasi<br />
completa del mare ed in molte aree anche con presenza fast ice. Le traiettorie fra waypoint<br />
pianificate sono state continuamente modificate a causa del mare di solito coperto; il laboratorio è
stato sempre pronto ad aggiornare, in tempo reale, il programma di navigazione per l’esecuzione<br />
delle attività delle UU.OO.; la nave non ha mai potuto percorrere una traiettoria di minimo<br />
percorso.<br />
Attività di supporto<br />
Figura 1 – Percorso della M/N Italica nel I<strong>LEG</strong> della XIII<br />
nel periodo 23 Novembre 1997 al 14 Gennaio 1998<br />
Il sistema NETNAV, su richiesta del Prof. Giancarlo SPEZIE, è stato attivato sin dalla<br />
partenza dal porto di Ravenna in modalità completamente automatica, acquisendo i dati di<br />
navigazione, di profondità e quelli meteorologici su tutta la navigazione ITALIA-NEW<br />
ZEALAND. I parametri acquisiti hanno permesso di generare una banca di dati meteorologici<br />
importante soprattutto per le aree oceaniche attraversate.<br />
Le tabella I e II riportano un quadro complessivo delle attività svolte durante questo I <strong>LEG</strong>;<br />
i particolari, di tutta l’attività scientifica delle UU.OO. presenti a bordo, sono riportati nel Data<br />
Base allegato alla presente relazione.
Dall’elaborazione di tutti i dati di navigazione acquisiti da NET-NAV è stata tracciata la<br />
carta del percorso totale per il I <strong>LEG</strong> (Christchurch – Mar di Ross – Dunedin); la nave Italica ha<br />
percorso 6352 miglia nautiche.<br />
Tabella I - Coordinate Geografiche in WGS 84 dei mooring<br />
Posizionati nel I <strong>LEG</strong> della XIII Spedizione<br />
Mooring Latitudine Longitudine Profondità (m)<br />
B 73°59.812’S 175°10.101’E 591<br />
D 75°08.283’S 164°27.030’E 1065<br />
H 75°54.105’S 177°44.067’W 650<br />
Tabella II – Riepilogo delle attività scientifiche<br />
23/11 /97– 15/1/1998<br />
Attività<br />
n. operazioni<br />
UU.OO.<br />
Recupero Mooring 3 Clima, Bioseso<br />
Posizionamento Mooring 3 Clima, Bioseso<br />
Clima, Bioseso<br />
CTD + Rosette<br />
66<br />
Contaminazione<br />
Ambientale<br />
Carotaggi e Box Core 30 Bioseso, Cicli Recenti<br />
XBT 136 CLIMA<br />
Rilievi Idrografici 46 Virdis<br />
Rilievi Ondametrici 200(*) Tedeschi<br />
SBP+ HNT 11 Bioseso<br />
Particellato 97 Bioseso<br />
Echo Survey 44 Azzali<br />
PHN 35 Greco<br />
Particellato 97 Bioseso<br />
Contaminazione<br />
5 Contaminazione<br />
Ambientale<br />
Ambientale<br />
(*) – registrazioni 18 minuti intervallate di un ora<br />
La banca dati di NET-NAV può essere consultata per mezzo di un programma, denominato<br />
lettura, con il quale si possono generare file dati di formato differente secondo le proprie esegenze;<br />
questo programma, in rete, può essere utilizzato da qualunque U.O. collegata in rete. I particolari di<br />
gestione sono riportati nella relazione tecnica relativa al sistema NET-NAV. Dalla banca dati , ogni<br />
giorno ed ogni fine settimana, sono stati elaborati mediante supporto grafico gli andamenti<br />
temporali della temperatura, pressione, umidità relativa e radiazione solare. La figura 2 si riferisce<br />
al 4 gennaio ’98 e la figura 3 al periodo 30 novembre 6 dicembre ’97; esse rappresentano un<br />
esempio tipico degli elaborati meteo.
Restituzioni Cartografiche.<br />
Figura 2 Figura 3<br />
Per tutte le attività sono state elaborate delle restituzioni cartografiche dei percorsi della<br />
nave durante l’esecuzione degli eventi eseguiti dalle UU.OO.<br />
Tutti gli eventi registrati sono stati rappresentati su carte di Mercatore, costruite con ipotesi<br />
della Terra rappresentativa sferica e le cui relazione di corrispondenza sono:<br />
x<br />
= kλ<br />
, y = k log(tg(<br />
π/4<br />
+ ϕ / 2))<br />
con k una costante che dipende dalla scala della carta. Queste relazioni, note come relazioni di<br />
corrispondenza, forniscono alla carta una deformazione angolare nulla e rappresentano<br />
rigorosamente il percorso effettivo seguito dalla nave; inoltre la scala delle latitudini dovrà essere<br />
utilizzata per la misura delle distanze.<br />
Le figure 3,4 si riferiscono ad elaborazioni finali di alcune UU.OO. che hanno svolto attività di<br />
ricerca.
Figura 3 – Rilievo Eco Survey<br />
Figura 4 – Attività di Mesoscala nell’area di Cape Adare
Alla fine dell’attività scientifica di tutte le UU.OO. sono state elaborate e restituite su supporto<br />
cartografico, costruito per mezzo di algoritmi matematici rigorosi, le seguenti rappresentazioni<br />
cartografiche:<br />
1) Carta della navigazione dell’Italica I Leg;<br />
2) Carta degli XBT (23/11 – 30/11/97);<br />
3) Carta degli XBT (9/1 – 12/1/98);<br />
4) Carta dei profili HNT (n. 4);<br />
5) Carta dei Mooring;<br />
6) Carta dei Box Corer;<br />
7) Carta dei Carotaggi;<br />
8) Carta delle stazione CTD+Rosette presso area mooring B;<br />
9) Carta delle stazioni CTD+Rosette Mesoscala (Cape Adare);<br />
10)Carta delle stazioni CTD+Rosette area BTN;<br />
11)Carta attività U.O. Contaminazione Ambientale;<br />
12)Carta stazioni PHN;<br />
13)Carta delle stazioni di Particellato e Produzione Primaria (New Zealand – mar di Ross);<br />
14)Carta delle stazioni di particellato e produzione Primaria (Mar di Ross);<br />
15)Carta dei rilievi idrografici area BTN;<br />
16)Carta dei rilievi Echo Survey.<br />
DATABASE<br />
Per facile consultazione di tutti i dati di posizione associate alle misure effettuate da tutte le<br />
UU.OO. , tutti gli eventi, gli elaborati cartografici e quelli meteorologici sia giornalieri che<br />
settimanali sono stati raccolti in un unico database consultabile presso la sede del PNRA.<br />
Considerazioni tecniche sulla strumentazione.<br />
Durante questo I <strong>LEG</strong> si sono verificate delle disfunzioni di alcuni sensori collegati al<br />
sistema di navigazione NET-NAV: Speed Doppler, Eco Sounder, ricevitore satellitare Magnavox e<br />
stazione meteorologica VAISALA.<br />
Il sensore di velocità, Speed Doppler (DIAMAR), sin dal partenza della nave da Ravenna<br />
aveva mostrato un cattivo funzionamento: la velocità misurata non era molto attendibile; dopo<br />
diversi tentativi da parte del personale di bordo, il sensore è stato escluso dal sistema di<br />
navigazione. La velocità della nave è stata così inserita mediante operazione manuale per mezzo<br />
del ricevitore Magnavox abilitato alla sua gestione. Questa operazione ha portato una degradazione<br />
della posizione stimata , non potendo continuamente variare manualmente la variazione di velocità<br />
della nave.<br />
L’Eco Survey Sounder Laz 4700, non sempre, è stato in grado di fornire al sistema di<br />
navigazione l’informazione digitale del fondo marino pur registrando il profilo su carta. Questa<br />
difficoltà di funzionamento si è più spesso verificata alle velocità della nave nel range 6-9 nodi.<br />
Migliori prestazioni dello scandaglio sono state ottenute con basse ed alte velocità. Comunque<br />
durante le due traversate New Zealand – Mar di Ross lo scandaglio non ha mai fornito la profondità<br />
nella modalità digitale utile per il sistema di acquisizione. Inoltre, in presenza di pack ice il LAZ<br />
4700 ha avuto sempre difficoltà nel misurare la profondità del fondo marino.<br />
Alcuni problemi di funzionamento sono stati riscontrati anche per il ricevitore integrato di<br />
navigazione Magnavox MX 1105 (PNRA). Due sistemi di posizionamento, NNSS-Transit e<br />
OMEGA non sono più disponibili perché resi non operativi agli usi civili da parte del DoD<br />
(Department of Defence) americano; il sistema Dead Reckoning (navigazione stimata) non è stato
in grado di fornire un posizionamento affidabile a causa della non affidabilità della misura della<br />
velocità; inoltre, il sistema satellitare GPS non sempre è stato in grado di fornire la posizione al<br />
sistema NETNAV. Occorrerà, quindi, sostituirlo con un più moderno ricevitore che abbia la<br />
caratteristica di gestire i sensori di velocità e girobussola in dotazione alla nave Italica.<br />
La stazione meteorologica, Vaisala, installata frettolosamente alla partenza da Ravenna, ha<br />
colloquiato molto bene con il sistema di navigazione; qualche dubbio resta sul calcolo vettoriale<br />
del vento reale e sulla scelta della posizione dei sensori della stazione a bordo della nave.<br />
La posizione delle antenne (passive) dei ricevitori satellitari sistemati sul ponte normale<br />
della nave è risultata troppo vicina all’antenna del sistema di comunicazione satellitare; nei<br />
momenti di picco, le trasmissione dell’INMASART hanno continuamente disturbato la ricezione<br />
dei segnali di navigazione con il risultato di far perdere la posizione della nave ai due ricevitori<br />
GG24; in queste fasi solo il ricevitore Trimble 4000, particolarmente protetto dalle interferenze<br />
elettromagnetiche, è stato sempre in grado di fornire la posizione al sistema informatico distribuito<br />
NETNAV. Per la prossima spedizione si consiglia lo spostamento dell’antenna satellitare<br />
dell’INMARSAT dato che i cavi dei ricevitori di navigazione non permettono lo spostamento delle<br />
relative antenne e quasi sicuramente non sarà più disponibile il ricevitore Trimble 4000.<br />
Nonostante gli inconvenienti sopra riportati, il sistema NET NAV si è dimostrato molto<br />
robusto riuscendo sempre a fornire tutte le informazioni necessarie sia alle attività di ricerca che alla<br />
sicurezza della condotta della navigazione.<br />
Una relazione tecnica più dettagliata sui problemi sopra illustrati è stata consegnata al Capo<br />
Spedizione Ing. Antonino CUCINOTTA.<br />
Il Responsabile Scientifico<br />
Prof. Mario VULTAGGIO
1. Il sistema informatico distribuito NETNAV<br />
1.1 Introduzione.<br />
RELAZIONE TECNICA<br />
Laboratorio di Navigazione e Meteorologia<br />
Responsabile : Prof. Mario VULTAGGIO<br />
Il sistema NETNAV è essenzialmente un sistema distribuito software-hardware di<br />
navigazione integrata che le potenzialità informatiche rendono disponibile ad una serie di Client<br />
collegati in rete.<br />
Schematicamente la filosofia di NETNAV può essere riassunta dal seguente schema a<br />
blocchi :<br />
Figura 1 - Filosofia del sistema NETNAV.<br />
Le informazioni provenienti dai sensori forniti da più sistemi di navigazione, da una stazione<br />
meteorologica e da un ecoscandaglio, confluiscano nel laboratorio di Navigazione e Meteorologia,<br />
e sono elaborati da NETNAV.<br />
NETNAV, per mezzo di programmi software, trasmette in rete locale tutti i dati elaborati e<br />
li rende fruibili ad un numero illimitato di utenti.<br />
L’elaborazione e presentazione dei dati effettuata dal Laboratorio di Navigazione, inoltre,<br />
può essere effettuata, in maniera analoga anche da qualsiasi utente collegato in rete, che può<br />
personalizzarla per gli scopi prefissati.<br />
1.2 Aspetti di navigazione.<br />
1.2.1 Navigazione integrata.<br />
La navigazione integrata si basa sul concetto di integrazione di due o più sistemi di<br />
posizionamento, ciascuno con diverso grado di precisione.<br />
NETNAV sotto questo aspetto è da considerarsi un sistema integrato di navigazione, che nel<br />
parco dei sistemi di navigazione disponibili, fornisce la posizione con la migliore accuratezza.
1.2.2 I sensori del sistema.<br />
Come detto al Laboratorio di Navigazione affluiscono tutta una serie di informazioni<br />
riguardanti la condotta della navigazione che possono essere suddivise in : posizione, profondità e<br />
parametri ambientali.<br />
Nella tabella seguente sono riportati nel dettaglio i sensori di navigazione, installati a bordo<br />
della nave ITALICA ordinati per grado di precisione, inventariati PNRA ed IUN :<br />
Sensore Marca Precisione Caratteristiche<br />
− DGPS 1÷5 m Uso di una stazione a terra<br />
− 2 GG24 Ashtech ±10 m Due costellazioni<br />
− GPS Trimble 4000 ±100 m Sistema degradato<br />
− Transit Mx1105 ±0.5 mg Non più disponibile (1/1/97)<br />
− Omega Mx1105 ±3 mg Non sarà disponibile (1/1/98)<br />
− Dead Reckoning Mx1105 ε(t) Gyro e Speed Doppler<br />
(navigazione stimata)<br />
I ricevitori satellitari integrati GG24 sono quanto di meglio offre oggi il mercato; la loro<br />
realizzazione, resa possibile dagli ultimi avvenimenti politici, offre la possibilità di poter utilizzare<br />
satelliti di entrambe le costellazioni: la costellazione russa del sistema GLONASS e quella<br />
americana del sistema GPS; inoltre, mediante la tecnica differenziale è possibile ottenere dati di<br />
posizione con accuratezze metriche.<br />
Il sensore di direzione (girobussola) ed il sensore di velocità (speed doppler) permettono, in<br />
caso di non disponibilità dei sistemi di navigazione satellitare e radio elettronica, di determinare una<br />
stima della posizione in tempo reale e con metodi informatici.<br />
I dati meteo provengono da una stazione meteorologica, che fornisce i parametri di<br />
temperatura, pressione, umidità e radiazione solare, oltre alla direzione assoluta del vento, ricavata<br />
da quella relativa, in base alle informazioni sul moto della nave fornitegli dal sistema NETNAV.<br />
Completa il quadro dei sensori, lo scandaglio Elac Laz 4700 che fornisce l'informazione di<br />
profondità.<br />
1.3 Aspetti informatici.<br />
1.3.1 Generalità.<br />
Il sistema NETNAV si compone di due server di rete di pari livello; in caso di mancato<br />
funzionamento di uno dei due subentra l'altro. NETNAV, per mezzo di una rete locale, distribuisce<br />
a tutti gli utenti di rete dislocati nei vari laboratori della nave i dati di navigazione.<br />
Il sistema, oltre all'acquisizione in tempo reale dei dati meteorologici e di posizione, elabora<br />
una rappresentazione numerica e grafica di tali elementi; ciascun utente, collegato in rete, ha la<br />
possibilità di elaborare i dati in sede locale, acquisire una propria banca dati relativa ai suoi eventi ,<br />
trasmettere e ricevere messaggi. Inoltre, ogni utente, mediante una seriale di output locale, può<br />
trasferire i dati di proprio interesse interfacciando il PC, in rete, con la propria strumentazione<br />
scientifica.
1.3.2 Configurazione della rete.<br />
La configurazione della rete è costituita da uno SWITCH e due HUB , dislocati sui due<br />
ponti della nave dove si trovano ubicati la maggior parte dei laboratori scientifici; la rete è<br />
intelligente nel senso che oltre a distribuire le informazioni ne razionalizza il flusso da e verso<br />
l'utenza a seconda delle esigenze; la figura 2 illustra lo schema a blocchi del collegamento dei due<br />
Server del sistema NETNAV con i due HUB mentre la figura 3 riporta lo schema dei collegamenti<br />
dei differenti laboratori delle UU.OO che esplicano attività di ricerca con il laboratorio di<br />
navigazione e meteorologia. La velocità standard di flusso di dati che circolano nella rete è di 100<br />
Mb ma gli HUB gestiscono anche le schede di rete da 10 Mb.<br />
Figura 2 - Configurazione della rete.<br />
Figura 3 - Configurazione del collegamento degli utenti nella rete.
1.3.3 Rete Monitor.<br />
E’ stata installata a bordo una rete autonoma per la trasmissione dei dati elaborati da<br />
NETNAV su monitor televisivo a circuito chiuso; le immagini di NETNAV vengono così irradiate<br />
in vari locali della nave, fornendo all’utenza, in sola visione, tutte le informazioni acquisite ed<br />
elaborate; i particolari saranno illustrati in dettaglio nel paragrafo successivo.<br />
Come nel caso della rete informatica, anche qui tre ripetitori provvedono ad amplificare i<br />
segnali affinché la qualità dell’immagine non si deteriori troppo all’aumentare della distanza dai<br />
Server.<br />
1.3.4 Interfaccia video.<br />
L'interfaccia con l'utenza è illustrata in figura 4; essa può essere suddivisa in tre parti: a<br />
destra la rappresentazione grafica della posizione e della traiettoria seguita dalla nave mediante<br />
carta elettronica, a sinistra la rappresentazione numerica dei dati; in particolare vengono forniti in<br />
tempo reale: la data, l'ora e la posizione della nave; seguono gli elementi della traiettoria ed il dato<br />
di profondità. In ultimo i parametri fisici forniti dalla stazione meteorologica.<br />
NETNAV provvede anche a fornire gli elementi cinematici di avvicinamento ad un way<br />
point prefissato (centro della rappresentazione, v. fig. 4).<br />
Figura 4 - Interfaccia video di NETNAV.<br />
La parte inferiore dello schermo è riservata a tutti i messaggi e gli eventi eseguiti dagli<br />
Utenti i quali possono interagire con il programma lanciando messaggi, registrando eventi,<br />
regolando la scala di rappresentazione dell’area di lavoro, mediante appositi comandi digitati da<br />
tastiera. Lo schema di figura 5, illustra in modo sintetico, i differenti modi di operare di NETNAV<br />
ed alcuni tipi di interventi che l’operatore locale può effettuare dal PC locale connesso in rete.
Figura 5 – Gestione degli EVENTI da PC in rete<br />
1.4 Elaborazione e presentazione dei dati acquisiti.<br />
Durante il trasferimento da Lyttelton a BTN, NETNAV è stato integrato con alcuni moduli<br />
software per l’elaborazione dei dati acquisiti e disponibili su due distinte banche dati generati dai<br />
due Server. (per distinguere i file generati dai due server è stato adottato il criterio di etichettare i<br />
file con le sigle: IL (ILIO) e AN (ANCHISE).<br />
I dati provenienti dai sensori, acquisiti dal sistema NETNAV, vengono successivamente<br />
elaborati dal Laboratorio di Navigazione per la compilazione dei data report degli eventi eseguiti<br />
dai differenti gruppi di ricerca<br />
Il programma software LETTURA, consente di creare dei file personalizzati e contenenti<br />
parte delle informazioni raccolte in formato conveniente per gli usi dedicati. I file base per la<br />
generazione dei grafici relativi ai parametri meteorologici più rappresentativi, temperatura,<br />
pressione, umidità e radiazione solare, vengono ottenuti dal file tipo *LET.dat, contenenti<br />
informazioni circa la posizione della nave ed i parametri ambientali.<br />
Il software di interfaccia CARICA3, genera poi due file dati uno contenente le informazioni<br />
circa le coordinate geografiche della nave (ggmmPLT.dat) necessarie per poter tracciare al plotter<br />
le traiettorie percorse dalla nave, e l'altro del tipo ggmmMET.dat, database per la generazione dei
grafici dei parametri meteorologici sopra menzionati, ottenuti col programma software METEO4<br />
per la generazione di grafici giornalieri e METEOSET per la creazione di grafici settimanali. Il<br />
processo per la generazione dei grafici è illustrato in figura 6.<br />
Figura 6 – Schema generale elaborazione Data Base di NETNAV<br />
Figura 7 – Decodifica file dati meteorologici
Tutti gli Utenti , tramite un calcolatore collegato in rete, possono essere abilitati dal<br />
Laboratorio di Navigazione ad accedere, mediante una parola chiave, alla banca dati per la<br />
consultazione dei dati di loro interesse ed eventualmente del loro trasferimento ad altro PC ma non<br />
possono modificare i dati acquisiti dai due Server.<br />
Nella figura 7, infine, è riportato il formato dei dati meteorologici, le loro unita di misura<br />
necessari per ulteriori rappresentazioni ed analisi.<br />
Il Responsabile Scientifico<br />
Prof. Mario VULTAGGIO













