Operatori differenziali: - Consorzio Elettra 2000
Operatori differenziali: - Consorzio Elettra 2000
Operatori differenziali: - Consorzio Elettra 2000

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
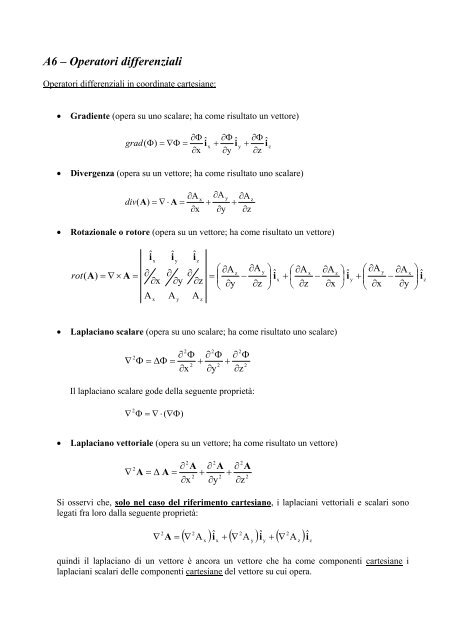
A6 – <strong>Operatori</strong> <strong>differenziali</strong><br />
<strong>Operatori</strong> <strong>differenziali</strong> in coordinate cartesiane:<br />
• Gradiente (opera su uno scalare; ha come risultato un vettore)<br />
∂Φ ˆ ∂Φ ˆ ∂Φ<br />
grad ( Φ)<br />
= ∇Φ = i<br />
ˆ<br />
x<br />
+ i<br />
y<br />
+ i<br />
∂x<br />
∂y<br />
∂z<br />
z<br />
• Divergenza (opera su un vettore; ha come risultato uno scalare)<br />
∂A<br />
div A)<br />
= ∇ ⋅ A =<br />
∂x<br />
∂A<br />
y<br />
+<br />
∂y<br />
∂A<br />
+<br />
∂z<br />
x<br />
z<br />
(<br />
• Rotazionale o rotore (opera su un vettore; ha come risultato un vettore)<br />
rot<br />
ˆi<br />
x<br />
∂<br />
∂x<br />
z y<br />
x z<br />
y x<br />
( A)<br />
= ∇ × A =<br />
= − i<br />
x<br />
+ ⎜ − ⎟ i<br />
y<br />
+ − i<br />
z<br />
A<br />
x<br />
ˆi<br />
A<br />
y<br />
y<br />
ˆi<br />
z<br />
∂ ∂<br />
∂y<br />
∂z<br />
A<br />
z<br />
⎛ ∂A<br />
⎜<br />
⎝ ∂y<br />
∂A<br />
∂z<br />
⎞<br />
ˆ<br />
⎟<br />
⎠<br />
⎛ ∂A<br />
⎝ ∂z<br />
∂A<br />
∂x<br />
⎞ ˆ<br />
⎠<br />
⎛ ∂A<br />
⎜<br />
⎝ ∂x<br />
∂A<br />
∂y<br />
ˆ<br />
⎟ ⎞<br />
⎠<br />
• Laplaciano scalare (opera su uno scalare; ha come risultato uno scalare)<br />
2 2 2<br />
2 ∂ Φ ∂ Φ ∂ Φ<br />
∇ Φ = ΔΦ = + +<br />
2 2 2<br />
∂x<br />
∂y<br />
∂z<br />
Il laplaciano scalare gode della seguente proprietà:<br />
2<br />
∇ Φ = ∇ ⋅ ( ∇Φ)<br />
• Laplaciano vettoriale (opera su un vettore; ha come risultato un vettore)<br />
2 2 2<br />
2 ∂ A ∂ A ∂ A<br />
∇ A = Δ A = + +<br />
2 2 2<br />
∂x<br />
∂y<br />
∂z<br />
Si osservi che, solo nel caso del riferimento cartesiano, i laplaciani vettoriali e scalari sono<br />
legati fra loro dalla seguente proprietà:<br />
∇ A =<br />
2<br />
2<br />
2<br />
( ∇ A ) ˆ<br />
x<br />
i<br />
x<br />
+ ( ∇ A<br />
y<br />
) ˆi<br />
y<br />
+ ( ∇ A z<br />
) i z<br />
2 ˆ<br />
quindi il laplaciano di un vettore è ancora un vettore che ha come componenti cartesiane i<br />
laplaciani scalari delle componenti cartesiane del vettore su cui opera.
<strong>Operatori</strong> <strong>differenziali</strong> in coordinate curvilinee:<br />
Si consideri un generico sistema di coordinate curvilinee (u 1 ,u 2 ,u 3 ), e siano<br />
versori fondamentali e (h1,h 2 ,h 3 ) i coefficienti metrici.<br />
Si definiscono gli operatori <strong>differenziali</strong> nel modo seguente:<br />
( ˆ<br />
1,<br />
uˆ<br />
ˆ<br />
2<br />
, u<br />
3<br />
u )<br />
i rispettivi<br />
• Gradiente<br />
• Divergenza<br />
∇ Φ =<br />
1<br />
h<br />
1<br />
∂Φ<br />
uˆ<br />
∂u<br />
1<br />
1<br />
+<br />
1<br />
h<br />
2<br />
∂Φ<br />
uˆ<br />
∂u<br />
2<br />
2<br />
+<br />
1<br />
h<br />
3<br />
∂Φ<br />
uˆ<br />
∂u<br />
3<br />
3<br />
1 ⎡ ∂<br />
∂<br />
∂ ⎤<br />
∇ ⋅ A = ⎢ (h<br />
2h<br />
3A1)<br />
+ (h<br />
3h1A<br />
2<br />
) + (h1h<br />
2A3<br />
) ⎥<br />
h1h<br />
2h<br />
3 ⎣∂u1<br />
∂u<br />
2<br />
∂u<br />
3 ⎦<br />
• Rotazionale<br />
uˆ<br />
ˆ ˆ<br />
1<br />
u<br />
2<br />
u<br />
3<br />
h ˆ ˆ ˆ<br />
1u1<br />
h<br />
2u<br />
2<br />
h<br />
3u<br />
3<br />
h<br />
2h<br />
3<br />
h<br />
3h1<br />
h1h<br />
1<br />
∇ × A = ∂ ∂ ∂ = ∂ ∂ ∂<br />
h h h ∂u1<br />
∂u<br />
2<br />
∂u<br />
3<br />
∂u1<br />
∂u<br />
2<br />
∂u<br />
1 2 3<br />
3<br />
h A h A h A h A h A h A<br />
1<br />
1<br />
2<br />
2<br />
3<br />
3<br />
1<br />
1<br />
2<br />
2<br />
3<br />
3<br />
2<br />
=<br />
uˆ<br />
1<br />
h h<br />
2<br />
uˆ<br />
2<br />
+<br />
h h<br />
1<br />
3<br />
⎡ ∂<br />
⎢<br />
⎣∂u<br />
2<br />
2<br />
⎡ ∂<br />
⎢<br />
⎣∂u<br />
• Laplaciano<br />
2 1 ⎡ ∂<br />
∇ = ⎢<br />
h1h<br />
2h<br />
3 ⎣∂<br />
u<br />
∂<br />
(h<br />
3A<br />
3<br />
) −<br />
∂u<br />
1<br />
3<br />
∂<br />
(h<br />
2A<br />
2<br />
) −<br />
∂u<br />
⎤ uˆ<br />
2<br />
(h<br />
2A<br />
2<br />
) ⎥ +<br />
⎦ h<br />
3h1<br />
2<br />
⎤<br />
(h1A1)<br />
⎥<br />
⎦<br />
⎡ ∂<br />
⎢<br />
⎣∂u<br />
3<br />
∂<br />
(h1A1)<br />
−<br />
∂u<br />
1<br />
⎤<br />
(h<br />
3A<br />
3<br />
) ⎥ +<br />
⎦<br />
h1h<br />
2h<br />
3<br />
1<br />
h1h<br />
2h<br />
3<br />
1<br />
h1h<br />
2h<br />
3<br />
[] ⎜ [] ⎟ +<br />
⎜ [] ⎟ +<br />
⎜ []<br />
1<br />
=<br />
h h h<br />
1<br />
2<br />
3<br />
⎡ ∂<br />
⎢<br />
⎣∂<br />
u<br />
1<br />
⎛<br />
⎜<br />
⎝<br />
h<br />
2<br />
h<br />
h<br />
1<br />
∇ 2 []<br />
1<br />
3<br />
⎛<br />
⎜<br />
⎝<br />
∂<br />
∂<br />
u<br />
1<br />
h<br />
2<br />
1<br />
∂<br />
⎞⎤<br />
1 ⎡ ∂ ⎛ h ⎤ ⎡ ⎛ ⎞⎤<br />
3h1<br />
∂ ⎞ 1 ∂ h1h<br />
2 ∂<br />
[] ⎟ +<br />
⎜ [] ⎟ +<br />
⎜ [] ⎟ ⎥⎦<br />
⎟⎥<br />
⎠⎦<br />
∂<br />
u<br />
1<br />
h<br />
1<br />
h<br />
⎞⎤<br />
⎟⎥<br />
⎠⎦<br />
2<br />
h<br />
3<br />
h<br />
⎢<br />
⎣∂<br />
1<br />
h<br />
2<br />
u<br />
2<br />
h<br />
3<br />
⎜<br />
⎝<br />
⎡ ∂<br />
⎢<br />
⎣∂<br />
u<br />
h<br />
L’operatore si può applicare sia a un campo scalare φ che a un campo vettoriale A<br />
espresso in coordinate curvilinee, e si ottengono così il laplaciano scalare e il laplaciano<br />
vettoriale in coordinate curvilinee. Nel caso vettoriale, occorre però tenere presente che in<br />
generale i versori non sono delle costanti, e quindi vanno anch’essi derivati.<br />
2<br />
2<br />
∂<br />
⎛<br />
⎜<br />
⎝<br />
u<br />
2<br />
h<br />
2<br />
2<br />
⎟⎥<br />
⎠⎦<br />
∂<br />
∂<br />
h<br />
u<br />
1<br />
2<br />
h<br />
2<br />
h<br />
3<br />
⎞⎤<br />
⎟⎥<br />
⎠⎦<br />
⎢<br />
⎣∂<br />
u<br />
h<br />
3<br />
1<br />
h<br />
⎜<br />
⎝<br />
2<br />
h<br />
h<br />
3<br />
3<br />
⎡ ∂<br />
⎢<br />
⎣∂<br />
u<br />
∂<br />
u<br />
3<br />
3<br />
⎛<br />
⎜<br />
⎝<br />
h<br />
⎟<br />
⎠<br />
2<br />
3<br />
∂<br />
∂<br />
u<br />
3<br />
⎞⎤<br />
⎟⎥<br />
⎠⎦<br />
=
Come casi tipici di sistemi di coordinate curvilinee, si possono considerare ad esempio il<br />
riferimento cilindrico e quello sferico. In tal caso, le espressioni degli operatori <strong>differenziali</strong> scritte<br />
sopra si particolarizzano nel modo seguente:<br />
a) Coordinate cilindriche<br />
Si ricordi che in un riferimento cilindrico si ha u 1 = ρ, u 2 = φ, u 3 = z e quindi risulta:<br />
h 1 = 1, h 2 = ρ, h 3 = 1<br />
• Gradiente<br />
• Divergenza<br />
∇Φ =<br />
∂Φ<br />
∂<br />
ˆi<br />
ρ<br />
∂<br />
∇ ⋅ A =<br />
ρ ∂ρ<br />
ρ<br />
1 ∂Φ<br />
+ ˆi<br />
ρ ∂ϕ<br />
( ρ A )<br />
φ<br />
∂Φ<br />
+ ˆ i<br />
∂z<br />
1 ∂Aφ<br />
∂A<br />
+ +<br />
ρ ∂ϕ<br />
∂z<br />
1 z<br />
ρ<br />
z<br />
• Rotazionale<br />
∇ × A =<br />
1 ˆi<br />
ρ<br />
∂<br />
∂ρ<br />
A<br />
ρ<br />
ρ<br />
ˆi<br />
φ<br />
∂<br />
∂ϕ<br />
ρA<br />
φ<br />
1 ˆi<br />
ρ<br />
∂<br />
∂z<br />
A<br />
z<br />
z<br />
1 ⎡∂A<br />
z<br />
= ⎢ −<br />
ρ ⎣ ∂ϕ<br />
∂<br />
∂<br />
z<br />
( ρ A )<br />
φ<br />
⎤ ˆ<br />
⎥ i<br />
⎦<br />
ρ<br />
⎡∂A<br />
+ ⎢<br />
⎣ ∂ z<br />
ρ<br />
∂A<br />
⎤<br />
z<br />
− ˆ<br />
⎥ i<br />
∂ρ<br />
⎦<br />
φ<br />
1 ⎡∂(<br />
ρ A<br />
+ ⎢<br />
ρ ⎣ ∂ρ<br />
φ<br />
) ∂A<br />
ρ ⎤<br />
− ˆ<br />
⎥ i<br />
∂ϕ<br />
⎦<br />
z<br />
=<br />
⎡ 1 ∂A<br />
∂A<br />
z φ ⎤<br />
=<br />
ˆ<br />
⎢ − ⎥ i<br />
⎣ ρ ∂ϕ<br />
∂ z ⎦<br />
ρ<br />
⎡∂A<br />
+ ⎢<br />
⎣ ∂ z<br />
ρ<br />
∂A<br />
⎤<br />
z<br />
− ˆ<br />
⎥ i<br />
∂ρ<br />
⎦<br />
φ<br />
⎡ 1 ∂(<br />
ρ A<br />
+ ⎢<br />
⎣ ρ ∂ρ<br />
φ<br />
) 1 ∂A<br />
ρ ⎤<br />
− ˆ<br />
⎥ i<br />
ρ ∂ϕ<br />
⎦<br />
z<br />
• Laplaciano<br />
∇<br />
2<br />
1 ∂ ⎛<br />
ρ ∂ρ<br />
⎝<br />
∂<br />
∂ρ<br />
⎞<br />
2<br />
1 ∂<br />
2 2<br />
ρ ∂ϕ<br />
2<br />
∂<br />
∂z<br />
[] = ⎜ ρ [] ⎟ + [] + [] = [] + [] + [] + []<br />
∇ 2 []<br />
⎠<br />
2<br />
2<br />
∂<br />
2<br />
∂ρ<br />
1 ∂<br />
ρ ∂ρ<br />
2<br />
1 ∂<br />
2 2<br />
ρ ∂ϕ<br />
L’operatore si può applicare sia a un campo scalare φ che a un campo vettoriale A espresso<br />
in coordinate cilindriche, e si ottengono così il laplaciano scalare e il laplaciano vettoriale in<br />
coordinate cilindriche. Per il laplaciano di un vettore, con alcune manipolazioni si può ottenere la<br />
seguente espressione alternativa:<br />
∇<br />
⎡<br />
A<br />
2<br />
ρ<br />
∂ A<br />
⎤<br />
⎡<br />
∂ A<br />
2<br />
( ∇ A z<br />
) i z<br />
2 2<br />
ρ<br />
φ<br />
ˆ 2<br />
φ<br />
ρ<br />
A = A<br />
i A<br />
ˆ<br />
⎢∇<br />
i + ˆ<br />
ρ<br />
− −<br />
+<br />
2 2 ⎥ ρ ⎢∇<br />
φ<br />
− +<br />
2 2<br />
φ<br />
⎣<br />
ρ<br />
∂ϕ<br />
⎦<br />
⎣<br />
A<br />
ρ<br />
2<br />
ρ<br />
∂ϕ<br />
⎤<br />
⎥<br />
⎦<br />
2<br />
∂<br />
∂z<br />
2
Si osservi che, come già detto in precedenza, le componenti del laplaciano vettoriale non sono i<br />
laplaciani scalari delle componenti del vettore A, come avviene invece in coordinate cartesiane.<br />
b) Coordinate sferiche<br />
Si ricordi che in un riferimento cilindrico si ha u 1 = r, u 2 = θ, u 3 = φ e quindi risulta:<br />
h 1 = 1, h 2 = r, h 3 = r sinθ<br />
• Gradiente<br />
∇ Φ =<br />
∂Φ ˆi<br />
∂ r<br />
r<br />
+<br />
1<br />
r<br />
∂Φ<br />
∂<br />
ˆi<br />
ϑ<br />
θ<br />
1 ∂Φ<br />
+ ˆi<br />
r sinϑ<br />
∂ϕ<br />
φ<br />
• Divergenza<br />
∇ ⋅ A =<br />
1<br />
2<br />
r<br />
∂<br />
∂ r<br />
2 1 ∂<br />
( r A ) + ( sinϑ<br />
A )<br />
r<br />
r sinϑ<br />
∂ϑ<br />
θ<br />
1 ∂Aφ<br />
+<br />
r sinϑ<br />
∂ϕ<br />
• Rotazionale<br />
∇ × A =<br />
r<br />
2<br />
ˆi<br />
r<br />
sinϑ<br />
∂<br />
∂ r<br />
A<br />
r<br />
ˆi<br />
θ<br />
r sinϑ<br />
∂<br />
∂ϑ<br />
r A<br />
θ<br />
ˆi<br />
ϕ<br />
r<br />
∂<br />
∂ϕ<br />
r sinϑ<br />
A<br />
φ<br />
=<br />
r<br />
2<br />
1 ⎡ ∂<br />
sinϑ<br />
⎢<br />
⎣∂ϑ<br />
∂<br />
( r sinϑ<br />
A ) − ( r A )<br />
φ<br />
∂ ϕ<br />
θ<br />
⎤ ˆ<br />
⎥ i<br />
⎦<br />
r<br />
+<br />
+<br />
+<br />
1<br />
r<br />
⎡∂A<br />
r ∂<br />
ϑ<br />
⎢ −<br />
⎣ ∂ ϕ ∂ r<br />
⎡ 1 ∂A<br />
r ∂<br />
⎢ −<br />
⎣sinϑ<br />
∂ ϕ ∂ r<br />
1<br />
r sin<br />
⎤<br />
θ<br />
( ϑ ) ˆ 1 ⎡∂(r A ) ∂A<br />
r ⎤ 1<br />
r sin A i<br />
ˆ ⎡ ∂<br />
+ − i = ( sinϑ<br />
A )<br />
φ<br />
θ<br />
⎤<br />
θ<br />
( ) ˆ 1 ⎡∂(r A ) ∂A<br />
r ⎤<br />
r Aφ<br />
i<br />
ˆ<br />
θ<br />
+ − iφ<br />
⎥<br />
⎦<br />
⎥<br />
⎦<br />
r<br />
⎢<br />
⎣<br />
r<br />
⎢<br />
⎣<br />
∂ r<br />
∂ r<br />
∂θ<br />
⎥<br />
⎦<br />
∂θ<br />
⎥<br />
⎦<br />
ϕ<br />
r sinϑ<br />
⎢<br />
⎣∂ϑ<br />
φ<br />
∂Aθ<br />
⎤<br />
− ˆi<br />
∂ ϕ<br />
⎥<br />
⎦<br />
r<br />
+<br />
• Laplaciano<br />
∇<br />
2<br />
2<br />
[] = r [] sinϑ<br />
[] []<br />
2<br />
∂<br />
=<br />
∂ r<br />
2<br />
1<br />
2<br />
r<br />
∂ ⎛<br />
⎜<br />
∂ r ⎝<br />
2 ∂<br />
r ∂ r<br />
∂<br />
∂ r<br />
1<br />
2<br />
r<br />
⎞<br />
⎟ +<br />
⎠ r<br />
2<br />
2<br />
∂<br />
2<br />
∂ϑ<br />
1 ∂ ⎛<br />
⎜<br />
sinϑ<br />
∂ϑ<br />
⎝<br />
[] + [] + [] + [] +<br />
[]<br />
r<br />
2<br />
1 ∂<br />
tanϑ<br />
∂ϑ<br />
∂<br />
∂ϑ<br />
⎞<br />
⎟ +<br />
⎠ r<br />
r<br />
2<br />
2<br />
2<br />
1 ∂<br />
2 2<br />
sin ϑ ∂ϕ<br />
2<br />
1 ∂<br />
2 2<br />
sin ϑ ∂ϕ<br />
=<br />
∇ 2 []<br />
L’operatore si può applicare sia a un campo scalare φ che a un campo vettoriale A espresso<br />
in coordinate sferiche, e si ottengono così il laplaciano scalare e il laplaciano vettoriale in<br />
coordinate sferiche.
Per il laplaciano di un vettore, con alcune manipolazioni si può ottenere la seguente espressione<br />
alternativa:<br />
A<br />
2<br />
⎡<br />
2 2A<br />
r<br />
2Aθ<br />
2 ∂Aθ<br />
2 ∂<br />
φ ⎤<br />
∇ A =<br />
ˆ<br />
⎢∇<br />
A<br />
r<br />
− − − −<br />
i<br />
2 2<br />
2<br />
2 ⎥<br />
⎣ r r tanϑ<br />
r ∂ϑ<br />
r sinϑ<br />
∂ϕ<br />
⎦<br />
⎡<br />
A<br />
2 Aθ<br />
2 ∂A<br />
2 ∂<br />
φ ⎤<br />
r<br />
+ A<br />
ˆ<br />
⎢∇<br />
θ<br />
− + −<br />
i<br />
2<br />
2<br />
2<br />
⎥ θ<br />
+<br />
⎣ r sinϑ<br />
r ∂ϑ<br />
r sinϑ<br />
tanϑ<br />
∂ϕ<br />
⎦<br />
⎡ 2 A A<br />
2<br />
∂<br />
r<br />
φ 2 ∂A<br />
⎤<br />
θ<br />
+ A<br />
ˆ<br />
⎢∇<br />
φ<br />
+<br />
− +<br />
i<br />
2<br />
2 2 2<br />
⎥<br />
⎣ r sinϑ<br />
∂ϕ<br />
r sin ϑ r sinϑ<br />
tanϑ<br />
∂ϕ<br />
⎦<br />
φ<br />
r<br />
+<br />
Si osservi che, come già detto in precedenza, le componenti del laplaciano vettoriale non sono i<br />
laplaciani scalari delle componenti del vettore A, come avviene invece in coordinate cartesiane.
Principali relazioni <strong>differenziali</strong>:<br />
1) ∇( Φ + ψ) = ∇Φ + ∇ψ<br />
2) ∇ ⋅(<br />
A + B)<br />
= ∇ ⋅ A + ∇ ⋅B<br />
3) ∇ × ( A + B)<br />
= ∇× A + ∇×<br />
B<br />
4) ∇<br />
5) ∇<br />
2<br />
( Φ + ψ) = ∇ Φ + ∇<br />
2<br />
2<br />
2<br />
( A + B)<br />
= ∇ A + ∇<br />
2<br />
6) ∇ ⋅ ( ∇Φ)<br />
= ∇ Φ<br />
7) ∇(<br />
Φ ψ) = Φ∇ψ<br />
+ ψ∇Φ<br />
2<br />
2<br />
ψ<br />
B<br />
8) ∇ ⋅(<br />
ΦA)<br />
= Φ∇ ⋅ A + ∇Φ ⋅ A<br />
9) ∇ × ( ΦA ) = Φ∇× A + ∇Φ × A<br />
10) ∇ ⋅(<br />
A × B)<br />
= B ⋅∇× A − A ⋅∇×<br />
B<br />
11) ∇×∇Φ = 0<br />
12) ∇ ⋅∇× A = 0<br />
2<br />
13) ∇ × ( ∇ × A)<br />
= ∇(<br />
∇ ⋅ A)<br />
− ∇ A<br />
2<br />
14) ∇ ⋅(<br />
Φ∇ψ)<br />
= ∇Φ ⋅∇ψ<br />
+ Φ∇ ψ<br />
15) ∇ ( A ⋅B)<br />
= A×<br />
( ∇× B)<br />
+ B×<br />
( ∇× A)<br />
+ ( A ⋅∇)<br />
B + ( B ⋅∇)<br />
A<br />
16) ∇ × ( A × B)<br />
= ( ∇ ⋅B)<br />
A − ( ∇ ⋅ A)<br />
B + ( B ⋅∇)<br />
A − ( A ⋅∇)<br />
B<br />
17) ∇<br />
2<br />
18) ∇<br />
2<br />
( Φψ)<br />
= Φ∇ ψ + ∇Φ ⋅∇ψ<br />
+ ψ ∇<br />
2<br />
2<br />
2<br />
( ΦA ) = Φ∇ A + A∇<br />
Φ + 2( ∇Φ ⋅ ∇)<br />
A<br />
19) ∇∇ ⋅( ΦA ) = ( ∇Φ)<br />
∇ ⋅ A + Φ∇∇⋅ A + ∇Φ ×∇× A + ( A ⋅∇)<br />
∇Φ + ( ∇Φ ⋅∇)<br />
A<br />
20) ∇ × ∇ × ( ΦA<br />
) = ∇Φ × ∇ × A − A∇<br />
2<br />
2<br />
Φ<br />
Φ + ( A ⋅∇)<br />
∇Φ + Φ∇ × ∇ × A + ∇Φ ∇ ⋅ A − ( ∇Φ ⋅∇)<br />
A<br />
Le relazioni 11, 12 e 13 sono particolarmente importanti.