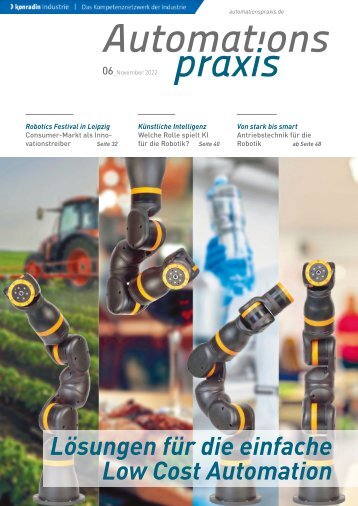
_Special Fachpack: Verpackungsautomation Erste von drei Stufen einer umfangreichen Automatisierung Roboteranlage palettiert Mehlsäcke Für die Schapfenmühle hat de Man eine flexible Palettieranlage für Mehl- und Schrot-Säcke entwickelt, die mit der großen Varianz in Maßen und Füllgraden der Säcke umgehen kann. Bild: Deman Um die unterschiedlich großen und schweren Säcke sicher zu transpor - tieren verfügt der speziell entwickelte Greifer zusätzlich zu den Greiffingern über eine obere und seitliche Andruckplatte. Automatisiert palettieren wollte die auf Dinkelprodukte, Backmischungen und Reformkost spezialisierte Schapfenmühle Säcke mit Mehl, Schrot und Schälprodukten, die sich nicht nur in den Abmessungen (Länge 480 bis 950 mm) und dem Gewicht (10 bis 25 kg), sondern auch im Füllgrad (lasch bis stramm gefüllt) deutlich unterscheiden. Auch bei den Palettentypen war eine große Bandbreite zu berücksichtigen: Es kommen sowohl Euro-Paletten als auch H1 Hygienepaletten und Containerpaletten zum Einsatz. Die vorgegebene Leistung: bei Mehl und Schrot 560 Säcke und bei Schälprodukten 480 Säcke pro Stunde. Neben der großen Varianz der zu palettierenden Produkte waren auch das geringe Platzangebot und die niedrige Deckenhöhe zu berücksichtigen. Vor diesem Hintergrund erstellte de Man in der ersten Stufe eine Palettieranlage mit zwei Palettenmagazinen, einem Bodenlagenmagazin und einer Palettenhubstation. Die beiden Palettenmagazine (eines davon mit Pufferplatz) haben eine Kapazität von je 15 Paletten und werden manuell mit einem Elektro-Hubwagen befüllt. Um die unterschiedlichen Palettentypen fassen zu können, sind sie in der Breite verstellbar. Für die Zuführung der Säcke, die aus Platzgründen von der Decke abgehängt werden musste, wurden ein bereits vorhandener Steigförderer und ein Egalisierungsband in die Anlage integriert. Die Säcke werden durch einen Schwenkförderer vom Steigförderer übernommen, um 90 Grad gedreht und mit dem Boden voraus auf das Egalisierungsband gefördert. Nun übernimmt ein Förderband die Säcke und transportiert sie mit einer Kurve auf den Abnahmeplatz in der Palettierzelle, von wo sie auf einer Rollenbahn bis zum Endanschlag gefördert werden. Der Roboter – ein Kuka KR120-R3200 mit 4 Achsen – stapelt die Säcke auf der Leerpalette. Um die unterschiedlich großen und schweren Säcke sicher zu transportieren, verfügt der eigens entwickelte Greifer zusätzlich zu den Greiffingern über eine obere und seitli- 56 September 2019
_Special Fachpack: Verpackungsautomation Für die Zuführung der Säcke wurden ein vorhandener Steigförderer und ein Egalisierungsband in die Anlage integriert. che Andruckplatte. Mit einem Handrad kann die maximale Breite des Greifers manuell eingestellt werden. Die fertigen Paletten werden auf den Palettenabgabeplatz transportiert, der als Lift ausgelegt ist. Hier werden sie von einer Höhe von 500 mm auf 80 mm abgesenkt und anschließend mit einem Handhubwagen entnommen. Der langgezogene Aufbau der Anlage (knapp 13 m Länge, 12 m Breite und 3,75 m Höhe) ist durch den nächsten Projektschritt begründet: Eine zweite Palettieranlage wird zwischen den beiden Palettenmagazinen und der ersten Anlage positioniert sein, sodass die Magazine über die Fördertechnikstrecke beide Anlagen mit Paletten versorgen. Zuvor entstehen auf Kundenseite auch zwei neue Abfüllanlagen für Mehl- sowie für Schälprodukte, die dann jeweils eine der beiden Palettierzellen bedienen werden. Im Zuge der Realisierung der dritten Stufe des Projek- tes werden beide Palettierzellen an das übergeordnete ERP-System Navision angebunden, von dem sie alle auftragsbezogenen Daten (Paletten, Palettierschemen, Wickelprogramme, Etikettendaten) vorgegeben bekommen. Zwischen den Anlagen und Navision erfolgt dann ein regelmäßiger Austausch von Produktions-, Leistungs-, Auftrags- und Stammdaten. ↓ De Man Automation + Service GmbH & Co. KG www.deman.de Bild: Deman Cobot-Reichweite stark erweitern Mit Linearachsen Liftkit und Slidekit von SKF können Anwender die Reichweite ihrer Cobots stark erweitern, zum Beispiel für Pickand-Place-Anwendungen in der Verpackung. Beim Slidekit handelt es sich um eine Linearachse, die den Roboter um bis zu 1.800 mm verfährt. Das Liftkit hebt die Basis des Cobots auf eine Höhe von bis zu 900 mm, in Sonderfällen lassen sich auch größere Hübe realisieren. Liftkit und Slidekit sind Plugand-Play-Lösungen inklusive aller notwendigen mechanischen und elektrischen Schnittstellen zum Roboter. ↓ Bild: SKF SKF Linearsysteme GmbH www.skf.com; Fachpack Halle 3, Stand 621 Smartes Handling Mit Pismart greift der Greif- und Vakuumspezialist Piab die Trends der Industrie 4.0 auf. Pismart ist eine Technologie, die während des Handlings die wesentlichen Parameter der Abläufe misst, als selbstlernendes System optimiert und bei Abweichungen Warnungen abgibt. Zum Einsatz kommt Pismart in Hebeliftern, in Vakuumejektoren und Vakuumförderern sowie insbesondere im Cobot-Greifer Picobot. Genau genommen ist Picobot die Pumpen- und Steuerungseinheit für das jeweilige Greifmodul. Die neueste Generation ist mit dem Industrie-4.0-fähigen Picompact 23 Smart Ejektor ausgestattet. Dank des integierten IO-Link ist eine konstante Kontrolle nicht nur des Greifers, sondern des gesamten Prozesses und der Produktionsumgebung sowie eine vorausschauende Wartung möglich. Ausgestattet wird der Picobot mit einer Greifereinheit mit Saugnäpfen – z. B. den modular anpassbaren Pigrip Saugnäpfen zum Beutelhandling – oder dem Pisoftgrip – einer Kombination von Saugnapf und Fingern zum Handhaben sensibler Objekte wie Obst oder rohe Eier. Damit ist der smarte Picobot ein kompaktes Allround-Talent. ↓ Piab AB www.piab.com; Fachpack Halle 3, Stand 424 Bild: Piab September 2019 57