Uždavinių pavyzdžiai (pdf)
Uždavinių pavyzdžiai (pdf)
Uždavinių pavyzdžiai (pdf)
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
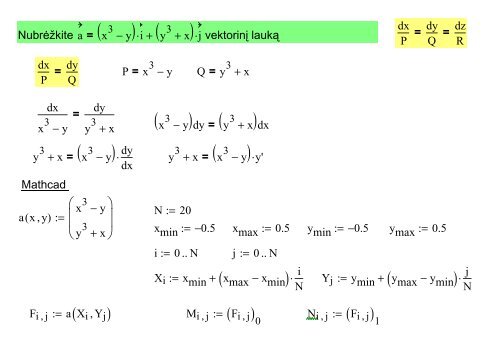
→Nubrėžkite a( x 3 →) − y ⋅ i ( y 3 )→= + + x ⋅ j vektorinį laukądxP=dyQ=dzRdxPdy= P = x 3 − y Q = y 3 + xQdxx 3 − yy 3Mathcada( x , y)=dyy 3 + x( ) dy( x 3 )3− y dy = ( y ) + x dx( ) ⋅y'+ x = x 3 − y ⋅ y 3 + x x 3 = − ydx:=⎛⎜⎜⎝x 3y 3−+yx⎞⎟⎟⎠( )N := 20x min := −0.5x max := 0.5 y min := −0.5y max := 0.5i := 0 .. N j := 0 .. NiX i := x min + ( x max − x min ) ⋅ Y j := yN min + y max − y min( ) 0( ) 1F i , j := a X i , Y jM i , j := F i , j N i , j := F i , j( )⋅jN
( M , N)
→Rasti vektorinio lauko ay = 0, z = 0}→ → →= y⋅i+ z⋅j+ x⋅ksrautą per paviršių S : {2x + y + 4z = 1, x = 0,Π=⌠⎮⎮⌡(S)⌠⎮⎮⌡→⎯→⎛a , n o⎝⎞⎠dsd→n=grad u=⎛⎜⎝∂ ∂u ,∂u , u∂x∂y∂z⎞⎟⎠→a→ → →= y⋅i+ z⋅j+ x⋅k= ( y , z , x)→⎯→⎛a , n o⎝⎞⎠2y z 4x= + +ds21 21 212x→n=→n→⎯n o+ y + 4z = 1 u = 2x + y + 4z − 1→= ( 2 , 1 , 4)= 2⋅i→ →+ j + 4 k= 2 2 + 1 2 + 4 2 = 21=→n→ndx dycos γ= ⎛ 2 1 4, ,⎞⎜⎟21 21 21cos γ=⎝214⋅dxdy⎠=421
0.8Projekcija į xOy0.22x+ y + 4z = 1 z=1 − 2x −4z = 0 2x + y = 1 y = 1 − 2xy==0.60.40.214140 0.25 0.51⌠ 2⎮⋅⎮⌡01⌠ 2⎮⋅⎮⌡01−2x⌠⎮⎮⌡01−2x⌠⎮⎮⌡0⎛⎜⎝2y7⋅x2Π=⌠⎮= ⎮⌡(S)⌠⎮⎮⎮⌡D xy1 − 2x − y+ + 4x4+7⋅y4+14dydx=⎞⎟⎠⌠⎮⎮⌡⌠⎮⎮⎮⌡→⎯→⎛a , n o⎝⎛⎜⎝2y21dydx=141⌠ 2⎮⋅⎮⌡0⎛⎜⎝⎞⎠+72 x ydsdz21=+⋅ 7+ ⋅4y 224x21+⎞ ⎟⎠z1−2x=14 ⋅y⋅−y4⎞ ⎛⎟ | ⎞⋅ 0⎠⎝ ⎠1−2x214dxdydx==
=141⌠ 2⎮⋅⎮⌡072 ⋅x⋅(1 − 2x)7+ ⋅(8 1 − 2x )2+14 ⋅( 1 − 2x)dx=141⌠ 2⎮⋅⎮⌡098−x2−7⋅x 22dx==121⎛ 98 x 1 x 2 7 x 3 ⎞⋅ ⎛⎜ − ⋅ − ⋅ ⎟⋅| 2 2 2 3 ⎝ 0⎝⎠⎞⎠12=14⋅⎡⎢⎣9 1⋅8 2−14⋅⎛⎜⎝12⎞⎟⎠2−76⋅⎛⎜⎝12⎞⎟⎠3⎤⎥⎦=17192
→Rasti vektorinio lauko ašoninį paviršių→ →= x⋅i+ z⋅ksrautą per cilindro S : {x 2 + y 2 = 4, z = 0, z = 2}Π=⌠⎮⎮⌡( S)⌠⎮⎮⌡→⎯→⎛oa , n⎝⎞⎠dsdProjekcija į yOz plokstumą210− 2 − 1 0 1 2u x 2 + y 2 →= − 4 n→n→⎯n o= grad u = ( 2x , 2y , 0)⋅( )= 4x 2 + 4y 2 = 4 x 2 + y 2 = 2⋅2 2 = 4=→n→n=( 2x , 2y , 0)4=⎛⎜⎝x2y, , 02projektuojame į plokštumą yOz ( x=0 )→ → →a = x⋅i+ z⋅k= ( x , 0 , z)→⎯→⎛⎝a, n o ⎞⎠ = x ⋅ x 2+ 0⋅y 2+ z⋅0x 2=2⎞⎟⎠
ds =dy dzcos α= 2dy dzxx 2 + y 2 = 4 ==> x 2 = 4 − y 2 x = 4 − y 2x 22 2⌠ ⌠⌠ ⌠⎮ ⎮x 22 2⎛ 2⎞⌠ ⌠Π = 2⋅⎮ ⎮dsd = 2⋅⎮⎮ ⎜ ⋅ ⎟ dydz= 2⋅⎮⎮ 4 − y 2 dydz= 8⋅π2 ⎮ ⎮ 2 x⌡( S)⌡⎝ ⎠ 2 x = 4 − y⌡0⌡− 2⌡0⌡− 22⌠⎮⌡02⌠⎮⌡− 24 − y 2dydz→4⋅π
→Rasti vektorinio lauko ax 2 + y 2 = z,z = 4}→ → →= ( 1 + 2x) ⋅i+ y⋅j+ z⋅ksrautą per uždarą paviršių S : {Π=⌠⎮⎮⌡⌠⎮⎮⌡( V)⌠⎮⎮⌡⎛⎜⎝∂P∂x+∂Q∂y+∂R∂z⎞⎟⎠dxdydzP = 1 + 2x Q = y R = z∂P∂x=2∂Q∂y=1∂R∂z=1Cilindirnė koordinačių sistema x = ρ⋅cos( φ)yz= ρ⋅sin( φ)dx dy dz = ρ ⋅ dρ dφ= zdzx 2 + y 2 = z ==> ( ρ⋅cos( φ)) 2 + ( ρ⋅sin( φ)) 2 = z ==> ρ 2 = z
Π4⌠ ⌠ ⌠⌠ ⌠ ⌠= ⎮ ⎮ ⎮ ( 2 + 1 + 1)dxdydz4 ⎮ ⎮ ⎮ 1 x y z⌡ ⌡V⌡⌡V⌡d ⌠= ⋅d d = 4⋅⎮⌡⌡02π⌠⎮⌡04⌠⎮⌡ρ 2ρdzdφdρ4 2π 4⌠ ⌠ ⌠4⋅⎮⎮ ⎮ ρ dzdφdρ→ −256⋅π⌡ ⌡ ⌡0 0 ρ 2Raskite vektorinio lauko F →x⋅e y →x⋅y→ →= ⋅ i + e ⋅j + sin( y⋅z)⋅kdivergencijądiv F=∂P∂x+∂Q∂y+∂R∂zP:= x⋅e y Q := e x⋅yR := sin( y⋅z)∂P∂x→ e y∂Q∂y→x⋅e x⋅y∂R∂z→y⋅cos( y⋅z)div F = e y + x⋅e x⋅y+ y⋅cos( y⋅z)
→Ar vektorinis laukas a( x z 2 − y 2 )→( ⋅ ⋅iy x 2 − z 2 →) ( + ⋅ j z y 2 − x 2 )→= + ⋅ ⋅ksolenoidinis?div a = 0 solenoidinis⋅( )⋅( )P := x z 2 − y 2 Q := y x 2 − z 2 R := z⋅( y 2 − x 2 )∂P∂x→z 2 − y 2∂Q∂y→x 2 − z 2∂R∂z→y 2 − x 2div a∂:=∂P +∂Q + R → 0 vektorinis laukas∂x∂y∂zsolenoidinis