Capitulo 6
Capitulo 6
Capitulo 6

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Capítulo 6<br />
Máquinas de<br />
Corrente Alternada<br />
6.1- GERADORES CA – ALTERNADORES<br />
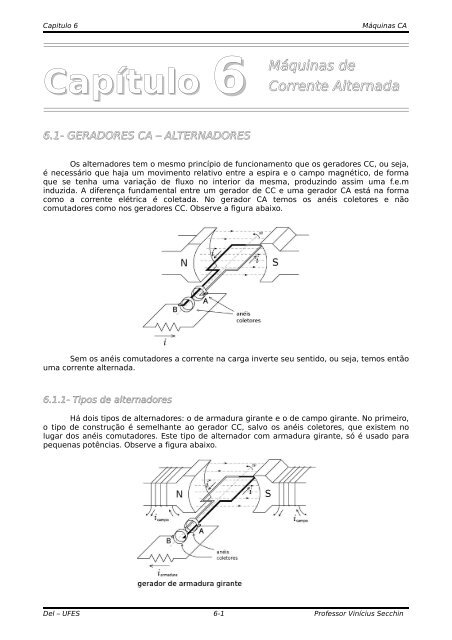
Os alternadores tem o mesmo princípio de funcionamento que os geradores CC, ou seja,<br />
é necessário que haja um movimento relativo entre a espira e o campo magnético, de forma<br />
que se tenha uma variação de fluxo no interior da mesma, produzindo assim uma f.e.m<br />
induzida. A diferença fundamental entre um gerador de CC e uma gerador CA está na forma<br />
como a corrente elétrica é coletada. No gerador CA temos os anéis coletores e não<br />
comutadores como nos geradores CC. Observe a figura abaixo.<br />
Sem os anéis comutadores a corrente na carga inverte seu sentido, ou seja, temos então<br />
uma corrente alternada.<br />
6.1.1- Tipos de alternadores<br />
Há dois tipos de alternadores: o de armadura girante e o de campo girante. No primeiro,<br />
o tipo de construção é semelhante ao gerador CC, salvo os anéis coletores, que existem no<br />
lugar dos anéis comutadores. Este tipo de alternador com armadura girante, só é usado para<br />
pequenas potências. Observe a figura abaixo.<br />
Del – UFES 6-1 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
O tipo de campo girante, tem sua armadura no estator (parte fixa da máquina, presa a<br />
carcaça) e o circuito de campo é colocado no rotor, diminuindo assim consequentemente os<br />
faiscamentos que poderiam surgir nas escovas, pois as tensões induzidas na armadura de<br />
alguns geradores podem ser da ordem de alguns milhares de volts. A figura abaixo representa<br />
este tipo de gerador.<br />
6.1.2 – Classificação dos alternadores<br />
Os alternadores podem ser classificados quanto a fase em monofásicos, bifásicos e<br />
trifásicos. A seguir descreveremos cada um deles, expondo suas características.<br />
a) Alternadores monofásicos<br />
No alternador monofásico, as bobinas de armadura, são ligadas em série ou paralelo. A<br />
figura a seguir representa o esquema de um gerador monofásico bipolar. O estator é bipolar<br />
porque é feito em dois grupos de pólos distintos. Observe que o rotor também consiste em dois<br />
grupos polares, que quando girando induzem tensão nos enrolamentos do estator.<br />
A 1<br />
N<br />
S<br />
A 2<br />
Gerador monofásico<br />
Tensão na saída do gerador<br />
Observe que para cada volta do rotor, temos um ciclo da tensão alternada induzida,<br />
então podemos escrever que a freqüência da tensão induzida será dada por:<br />
f=n'.p'<br />
Onde: f → freqüência da tensão induzida em Hertz [Hz]<br />
n’ → rotações do rotor por segundo [rps]<br />
p’ → número de pares de pólos<br />
Del – UFES 6-2 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Se aumentarmos o número de pares de pólos, podemos aumentar a freqüência elétrica<br />
sem mudarmos a freqüência mecânica de giro do rotor. Para um gerador com p’= 2 (2 pares de<br />
pólos ou 4 pólos) sua freqüência elétrica será duas vezes maior que a freqüência mecânica.<br />
Observe a figura abaixo.<br />
A 1<br />
S<br />
N<br />
N<br />
S<br />
A 2<br />
Gerador monofásico de 4 pólos<br />
Tensão na saída do gerador<br />
A expressão anterior pode ser reescrita da seguinte forma:<br />
f= np<br />
120<br />
Onde: f → freqüência da tensão induzida em Hertz [Hz]<br />
n → rotações do rotor em rotações por minuto [rpm]<br />
p → número de pares de pólos<br />
No caso de grandes geradores, seus rotores trabalham em baixa rotação, em torno de<br />
90 rpm, o que nos daria 80 pólos ou 40 pares de pólos para termos em sua saída uma tensão<br />
induzida na freqüência de 60 Hz.<br />
b) Alternadores bifásicos<br />
Estes alternadores são pouco comuns, possuem dois enrolamentos monofásicos e a<br />
diferença é que temos seus enrolamentos da armadura defasados 90º mecânicos um do outro,<br />
que nos dará um tensão de saída defasada 90º elétricos entre as fases A e B. Observe a figura<br />
a seguir.<br />
A 1<br />
N<br />
B 1<br />
B 2<br />
S<br />
A 2<br />
Gerador bifásico de 2 pólos<br />
Tensão na saída do gerador<br />
Del – UFES 6-3 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
c) Alternadores trifásicos<br />
Nos alternadores trifásicos, como o nome já sugere, possui três enrolamentos<br />
monofásicos defasados 120° mecânicos, o que nos dará um defasamento de 120° elétricos<br />
entre as três fases.<br />
A 1<br />
A B C<br />
C 2<br />
C 1<br />
B 2<br />
N<br />
S<br />
B 1<br />
A 2<br />
Gerador trifásico de 2 pólos<br />
Tensão na saída do gerador<br />
A expressão para o calculo da freqüência da tensão induzida no gerador monofásico,<br />
também é valida para os geradores bifásicos e trifásicos.<br />
6.1.3- Funcionamento dos alternadores<br />
6.1.3.1- Funcionamento a vazio<br />
A característica da tensão a vazio de um alternador é idêntica à de um gerador CC, ou<br />
seja, a tensão de saída depende da velocidade de giro do rotor e da corrente de excitação,<br />
chegando ao gráfico a seguir.<br />
V SAÍDA<br />
I EXCITAÇÃO<br />
Sua ligação esquemática pode ser representada como esquema abaixo, no caso para<br />
um gerador trifásico.<br />
Del – UFES 6-4 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
6.1.3.2- Funcionamento com carga<br />
Para simplificação do estudo, apenas analisaremos o funcionamento, quando o gerador<br />
CA alimenta uma carga resistiva e supondo o gerador com campo girante.<br />
Quando temos uma carga resistiva ligada ao gerador CA, no instante em que um dos<br />
pólos, por exemplo, o pólo norte do circuito de campo passa por um enrolamento da armadura,<br />
temos a geração de uma tensão induzida e da corrente induzida na armadura, aparece um<br />
conjugado contrário ao sentido de rotação do rotor, pois o enrolamento de campo tende a<br />
empurrar o enrolamento de armadura no mesmo sentido de rotação )observe figura abaixo),<br />
como este está preso a carcaça, do estator, pela 3ª lei de Newton, produzirá uma força<br />
contrária ao sentido de giro do rotor no próprio rotor. Então pela lei de conservação da energia,<br />
para que um gerador forneça energia elétrica a uma carga é necessário que forneçamos<br />
energia mecânica ao mesmo, que corresponde a energia elétrica mais as perdas do sistema.<br />
corrente de armadura<br />
torque<br />
resistente<br />
N<br />
rotação<br />
Del – UFES 6-5 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
6.2 – MÁQUINAS CA<br />
As máquinas CA podem ser divididas em dois grupos: as máquinas síncronas, muito<br />
semelhantes as máquinas CC e as máquinas assíncronas (motores de indução), mas o princípio<br />
básico do funcionamento das duas baseia-se no conceito do campo girante<br />
6.2.1- Campo girante<br />
O campo girante, é um campo magnético de módulo constante que gira dentro do<br />
estator de uma máquina CA. Isto é conseguido pelo fato de termos três enrolamentos dispostos<br />
no estator defasadamente de 120º mecânicos, sendo estes alimentados por tensões trifásicas<br />
também de defasadas de 120º elétricos. Observe a figura a seguir.<br />
A 1<br />
C 2 B 2<br />
B 1<br />
C 1<br />
A 2<br />
Estator trifásico de 2 pólos<br />
Desta forma então teremos no estator a soma de três campos magnéticos produzidos<br />
pelas três fases, dando como resultante um campo magnético girante. A figura abaixo<br />
representa as formas de ondas do campo produzida pelas fazes A, B e C e suas somatórias em<br />
diversas situações em função do tempo, até realizarmos um ciclo.<br />
A 1<br />
A 1<br />
A 1<br />
A 1<br />
B<br />
C 2<br />
2 C<br />
N B 2<br />
2<br />
S B 2<br />
B<br />
C<br />
S N<br />
N<br />
2<br />
C 2<br />
2<br />
S<br />
S N<br />
S N<br />
S<br />
B C N<br />
S N<br />
1<br />
1<br />
B S C 1 1<br />
B N<br />
C 1 1<br />
B C 1<br />
1<br />
A 2 A 1<br />
A 2<br />
A 1<br />
A A<br />
2 1 A 2<br />
N B 2<br />
B<br />
C 2<br />
C 2<br />
S B<br />
2 C 2<br />
2<br />
N<br />
N S<br />
S<br />
S<br />
N S<br />
N<br />
B 1<br />
S<br />
C 1 B C 1 1<br />
B C<br />
N<br />
1<br />
1<br />
A 2<br />
A 2 A 2<br />
A B C<br />
Campo girante em um motor trifásico<br />
Del – UFES 6-6 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Observe que nesta situação, o campo girante dá uma volta ao mesmo tempo que a<br />
tensão elétrica realiza um ciclo, então podemos escrever que:<br />
n=60 f<br />
Onde: f → freqüência da tensão induzida em Hertz [Hz]<br />
n → rotações do rotor em rotações por minuto [rpm]<br />
A nossa máquina em questão possui apenas dois pólos (N e S) por fase. Se<br />
aumentarmos o número de pólos observaremos que o ciclo magnético também aumentará sua<br />
freqüência, ou seja, se tivermos 4 pólos na fase, a cada ciclo elétrico teremos meio ciclo do<br />
campo girante (meio ciclo mecânico). Se tivermos então 6, 8 ou 10 pólos a velocidade do<br />
campo girante será 3, 4 ou 5 vezes menor que a velocidade da máquina de 2 pólos, sendo<br />
assim podemos chegar facilmente a expressão:<br />
n= 120f<br />
p<br />
Onde: f → freqüência da tensão induzida em Hertz [Hz]<br />
n → rotações do rotor em rotações por minuto [rpm]<br />
p → número de pares de pólos<br />
A esta velocidade, chamamos de velocidade síncrona.<br />
6.2.2- Motores de indução trifásicos<br />
Sabemos que se tivermos uma tensão trifásica, ligada a um enrolamento trifásico<br />
defasados de 120º mecânicos, teremos no estator do motor um campo girante. Se colocarmos<br />
então uma espira curto circuitada dentro deste estator, aparecerão correntes induzidas na<br />
mesma, pois o campo girante corta os condutores da espira. Se esta espira for presa a um eixo,<br />
a mesma começará a girar, pois a corrente induzida irá interagir com o campo girante dando<br />
origem a um conjugado ou torque de partida. Desta forma então a espira (rotor do motor)<br />
começará a girar, tentando acompanhar o campo girante.<br />
Observe que o rotor nunca poderá chegar a velocidade síncrona, pois se isto acontecer<br />
não teremos mais movimento relativo entre o campo girante e as espiras do rotor,<br />
consequentemente não haverá corrente induzida. Desta forma então, a velocidade de um<br />
motor de indução será sempre menor que a velocidade síncrona, sendo por isso chamado de<br />
máquina assíncrona.<br />
A esta diferença percentual entre a velocidade síncrona e a velocidade do rotor,<br />
chamamos de escorregamento, dado por:<br />
s= n− n R<br />
x100 %<br />
n<br />
Onde: n → velocidade do campo girante [rpm]<br />
n R → velocidade do rotor [rpm]<br />
s → escorregamento<br />
Os rotores das máquinas de indução são construídos com barras de cobre de grande<br />
seção curto circuitadas por anéis de cobre ou bronze. Este tipo de rotor é conhecido como rotor<br />
em curto ou gaiola de esquilo, devido sua forma física lembrar uma gaiola de esquilo. Podemos<br />
ainda termos os bobinados, onde podemos curto circuita-los ou ligá-los a resistores externos,<br />
cuja análise será abordada futuramente.<br />
Del – UFES 6-7 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Rotor em curto<br />
Rotor bobinado<br />
Os rotores em curto, ou gaiola de esquilo tem a grande vantagem de não possuir<br />
contatos elétricos móveis, eliminando-se assim os anéis coletores, escovas e suas constantes<br />
manutenções.<br />
6.2.2.1- Esquemas de ligações em um motor trifásico<br />
Como o motor trifásico possui três enrolamentos, seu esquema de ligação poderá ser<br />
em Y ou ∆, sendo que, se for ligado da última forma as bobinas terão uma tensão maior que em<br />
Y, pois a tensão de fase agora é igual a de linha.<br />
A figura abaixo mostra as duas formas de ligação.<br />
6.2.2.2- Conjugado em um motor trifásico<br />
O conjugado em um motor de indução pode ser demostrado matematicamente como<br />
sendo:<br />
C=C médio<br />
cos<br />
Lembre-se que o conjugado em um motor é proporcional ao produto B.I, onde B é o<br />
campo magnético produzido pelo estator e I é a corrente induzida no rotor. O ângulo que<br />
aparece na expressão do conjugado é a defasagem entre o campo magnético e a corrente<br />
induzida. Observe que o conjugado do motor será máximo quando = 0, ou seja, quando a<br />
característica elétrica do circuito do rotor for puramente resistiva, pois a f.e.m. induzida nas<br />
barras do rotor está em fase com o campo magnético, e como o rotor apresenta características<br />
indutivas, a corrente fica atrasada em relação a tensão, e conseqüentemente ao campo<br />
magnético. Em contrapartida o valor da corrente rotórica diminui não aumentando<br />
Del – UFES 6-8 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
significativamente o conjugado final do motor, mas eliminamos o conjugado resistente que<br />
existe quando há defasamento entre o campo magnético e a corrente rotórica.<br />
Nos rotores do tipo gaiola não podemos acrescentar resistência ao circuito do rotor,<br />
porém nos rotores bobinados, por termos acesso aos seus enrolamentos podemos faze-lo.<br />
Esta opção também diminui significativamente a corrente de partida.<br />
A figura a seguir mostra o gráfico do conjugado de um motor de indução com rotor tipo<br />
gaiola em função do escorregamento.<br />
Conjugado<br />
C máx<br />
25% 50% 75% 100%<br />
Escorregamento<br />
Observe que o conjugado aumenta rapidamente no primeiro trecho e depois cai<br />
lentamente até o motor parar. Temos então nesta curva duas regiões. Na primeira região seu<br />
funcionamento é estável, pois uma eventual sobrecarga produz um aumento no<br />
escorregamento do motor, aumentando assim sua corrente, reforçando então o conjugado do<br />
motor que restabelece novamente o equilíbrio. Na segunda região seu comportamento é<br />
instável, pois qualquer sobrecarga produz aumento em seu escorregamento, reagindo assim o<br />
motor com uma diminuição no conjugado, diminuindo mais ainda o seu escorregamento, e em<br />
pouco tempo levando o motor a parar.<br />
Podemos também analisar o conjugado em função da rotação do motor (figura abaixo).<br />
Neste diagrama notamos que a região de funcionamento do motor, compreende- se entre a<br />
velocidade do sincronismo e a de plena carga. O conjugado que o motor produz com carga<br />
nominal, é aproximadamente a metade do valor do conjugado máximo que o mesmo pode<br />
produzir.<br />
Conjugado<br />
C máx<br />
Conjugado<br />
de carga<br />
C carga<br />
25% 50% 75% 100%<br />
Velocidade<br />
Velocidade nominal<br />
em plena carga<br />
Del – UFES 6-9 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
6.2.2.3 – Circuito equivalente<br />
O circuito equivalente de um motor de indução com o rotor travado, é semelhante a um<br />
transformador, podendo assim lhe aplicar o mesmo modelo esquemático. Devido a freqüência<br />
induzida no rotor ser idêntica a do estator, as correntes no rotor produzem um campo girante<br />
com velocidade equivalente a síncrona com o mesmo sentido do campo do estator.<br />
Quando o rotor começa a girar a freqüência da corrente induzida cai para um valor dado<br />
pelo escorregamento do motor. Conseqüentemente, seu valor também cai, pois a f.e.m.<br />
induzida dependente da variação do fluxo, então se a freqüência diminui a f.e.m. induzida<br />
diminuiu também.<br />
Observe então que um aumento de carga reflete em uma diminuição na velocidade do<br />
rotor aumentando assim a sua corrente. No transformador nossa carga no secundário é<br />
elétrica, enquanto no motor de indução ela vem a ser mecânica e em função da velocidade, ou<br />
do escorregamento, que neste caso é proporcional.<br />
No circuito equivalente a carga mecânica pode ser substituída por uma resistência pura,<br />
pois um aumento de carga no eixo reflete nos terminais do motor um aumento de potência<br />
ativa. Sendo assim seu circuito equivalente será:<br />
Esquema equivalente por fase de um motor trifásico<br />
Onde: r 1 → resistência do enrolamento do estator<br />
x 1 → reatância do enrolamento do estator<br />
r p → perdas no núcleo<br />
x m → reatância de magnetização<br />
r 2 → resistência do rotor<br />
x 2 → reatância do rotor<br />
r S → resistência de carga<br />
E 1 → tensão induzida no estator<br />
E 2 → tensão induzida no rotor<br />
I 1 → corrente no estator<br />
I 2 → corrente no rotor<br />
A resistência carga pode ser escrita em função do escorregamento, como sendo:<br />
r S<br />
=r 2<br />
1− s<br />
s<br />
Podemos ainda fazer algumas simplificações no circuito equivalente, tais como:<br />
1ª) E1 = E2, pois se supomos que as espiras do estator estão na relação de 1:1 com as espiras<br />
do rotor, teremos nossa relação de transformação igual a 1.<br />
2ª) Em plena carga podemos desprezar a corrente de magnetização, e podemos ainda supor as<br />
perdas no núcleo como constantes.<br />
Del – UFES 6-10 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Chegamos então ao seguinte circuito equivalente.<br />
Esquema equivalente simplificado por fase de um motor trifásico<br />
6.2.2.4 – Potência<br />
Sabemos que a potência mecânica de um motor é a potência em seu eixo dada por:<br />
2<br />
P eixo =r S I motor<br />
Como<br />
1− s<br />
r S<br />
=r 2<br />
, sua potência no eixo será dada por:<br />
s<br />
1− s 2<br />
P eixo<br />
=r 2<br />
I<br />
s motor<br />
por:<br />
Como esta potência é entregue pelo rotor, neste também existem perdas ôhmicas dadas<br />
2<br />
P r2 =r 2 I motor<br />
Então a potência transferida ao rotor pelo estator será a potência mecânica (potência no<br />
eixo) mais as perdas ôhmicas, chegando a seguinte expressão:<br />
P rotor = r 2<br />
s<br />
Existem ainda no motor as perdas ôhmicas no circuito do estator P r1 e as perdas por<br />
ventilação e atrito e no núcleo P VAN . As perdas ôhmicas no estator podem ser calculadas da<br />
seguinte forma:<br />
2<br />
P r1 =r 1 I motor<br />
Já as perdas por atrito ou ventilação e no núcleo na maioria dos casos podem ser<br />
consideradas constantes.<br />
A potência ativa então consumida pelo motor será a soma de todas as parcelas<br />
descritas anteriormente, chegando então a:<br />
P consumida<br />
=P eixo<br />
P r2<br />
P r1<br />
P VAN<br />
Del – UFES 6-11 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Definimos rendimento de um motor como sendo a relação entre a potência no eixo<br />
e a potência consumida, dado por:<br />
= P eixo<br />
P consumida<br />
x100%<br />
Como o motor trifásico apresenta característica indutiva, precisamos calcular sua<br />
potência aparente, que é dada por:<br />
N= P consumida<br />
cos <br />
Onde cos é o fator de potência do motor.<br />
Então podemos calcular a potência aparente de um motor por fase como sendo:<br />
N= P eixo<br />
cos <br />
Multiplicando esta potência por três, e substituindo a potência aparente pelo produto<br />
tensão-corrente, chegaremos a seguinte expressão:<br />
P eixo<br />
=3V F<br />
I F<br />
cos<br />
Como a corrente de linha é igual a corrente de fase a a tensão de linha é 3 vezes a<br />
tensão de fase, podemos expressar esta expressão em termos da tensão de linha e corrente de<br />
linha como sendo:<br />
P eixo<br />
=3V L<br />
I L<br />
cos<br />
6.2.3 – Motores de indução bifásicos<br />
Os motores de indução bifásicos são pouco comerciais, porém sua analise será<br />
importante para compreendermos o funcionamento dos motores monofásicos.<br />
Os enrolamentos de um motor bifásicos são defasados de 90º mecânicos em seu estator<br />
e alimentados por tensões bifásicas defasadas de 90º elétricos. Observe a figura abaixo:<br />
A 1<br />
B 1<br />
B 2<br />
A 2<br />
Motor bifásico de 2 pólos<br />
Del – UFES 6-12 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Quando alimentamos o estator com uma tensão bifásica, também teremos o surgimento<br />
de um campo magnético girante. A figura abaixo representa a somatória dos campos<br />
produzidos por cada fase em alguns intervalos de tempo.<br />
A 1<br />
A 1<br />
A 1<br />
A 1<br />
A 1<br />
N<br />
S<br />
N<br />
B 1 B 2<br />
B 1<br />
N S B 2<br />
B 1 B B<br />
2 1 S N B 2<br />
B 1 B 2<br />
S<br />
N<br />
S<br />
A 2<br />
A 1 A A 1<br />
2<br />
A A 1<br />
2<br />
A A 1<br />
2<br />
A 2<br />
N<br />
S<br />
S<br />
N<br />
B 1<br />
N S B B<br />
2 1<br />
N S B 2<br />
B 1<br />
S N B 2<br />
B 1<br />
S N B 2<br />
S<br />
N<br />
N<br />
S<br />
A 2<br />
A 2<br />
A 2<br />
A 2<br />
A<br />
B<br />
0 o 45 o 90 o 135 o 180 o 225 o 270 o 315 o 360 o<br />
Os motores bifásicos também podem ter seu rotor como gaiola de esquilo ou bobinado.<br />
6.2.4 – Motores monofásicos<br />
Os motores monofásicos são divididos em dois tipos: os motores de indução e os<br />
motores tipo série.<br />
6.2.4.1 – Motores de indução<br />
O funcionamento dos motores de indução, baseia-se no principio do campo girante,<br />
porém em um motor monofásico de indução temos somente um enrolamento. Desta forma<br />
então não teremos um campo magnético girante e sim um campo pulsante, que não será<br />
capaz de fazer o motor girar. Observe a figura a seguir.<br />
A 1<br />
A 1<br />
A 2<br />
A 1<br />
A 1<br />
A 1<br />
A 1<br />
N<br />
S<br />
S<br />
A 2<br />
N<br />
A 2<br />
A 2<br />
Motor monofásico<br />
0 o 90 o 180 o 270 o 360 o<br />
Campo pulsante em um motor monofásico<br />
Del – UFES 6-13 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Se o motor já estivesse girando, esse campo apesar de pulsante seria suficiente para<br />
manter seu movimento, pois a própria inércia do rotor faz com que ele continue girando. O<br />
grande problema então é a partida do motor. Para se resolver esse problema constrói-se um<br />
enrolamento auxiliar defasado de 90º mecânicos do enrolamento principal. Liga-se então um<br />
capacitor em série com o enrolamento auxiliar, pois desta forma garantimos uma defasagem<br />
perto dos 90° elétricos entre as correntes do enrolamento principal e do enrolamento auxiliar<br />
simulando assim um motor bifásico. Desta forma então, o motor passa a possuir um conjugado<br />
de partida. A este motor damos o nome de motor de indução monofásico de fase auxiliar.<br />
Podemos também utilizar resistências elétricas para produzir este defasamento, porém é mais<br />
comum o uso de capacitores.<br />
Estes motores possuem ainda uma chave centrífuga que desliga o enrolamento auxiliar<br />
quando o motor atinge uma determinada rotação em que apenas seu campo pulsante mantém<br />
seu movimento, observe o esquema abaixo.<br />
Capacitor de<br />
partida<br />
Enrolamento<br />
auxiliar<br />
A 1<br />
Enrolamentos<br />
principais<br />
Chave centrífuga<br />
A 2<br />
Motor monofásico de fase auxiliar<br />
Os motores monofásicos também podem ser ligados em um sistema bifásico, pois na<br />
realidade temos dois enrolamentos principais, que podem ser ligados em série ou paralelo. A<br />
figura abaixo representa seu esquema em um sistema trifásico a 4 fios de 220V de linha.<br />
Ligações motor monofásico<br />
Temos ainda um outro tipo de motor de indução, o motor de campo distorcido. Este tipo<br />
de motor possui pólos salientes e em cada pólo é colocada uma cinta de cobre conforme figura<br />
abaixo.<br />
Cinta<br />
Enrolamento de<br />
campo<br />
Del – UFES 6-14 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Quando o campo magnético no estator começa a aumentar, é produzida uma corrente<br />
induzida na cinta que vai se opor ao campo indutor, desta forma temos uma concentração<br />
maior de linhas de campo na parte inferior do pólo. Quando o campo chega ao máximo não<br />
temos corrente induzida na cinta, então as linhas de campo se distribuem uniformemente no<br />
pólo. Após o ponto de máximo o campo começa a decrescer, ou seja, variar, produzindo assim<br />
uma corrente induzida na cinta que se opõe a sua variação, concentrando assim as linhas de<br />
campo dentro dela.<br />
Este movimento do campo produz um conjugado muito fraco, mas suficiente para<br />
colocar o motor em movimento. A figura abaixo representa o que foi dito. Quando a corrente<br />
inverte seu sentido temos o mesmo fenômeno porém no sentido contrario.<br />
A<br />
B<br />
B<br />
A<br />
C<br />
C<br />
Funcionamento motor de campo distorcido<br />
Os motores de indução por não apresentarem muito rendimento, tem sua aplicação<br />
restrita, sendo de potências fracionarias e de uso mais doméstico.<br />
6.2.4.2 – Motores monofásicos tipo série<br />
A característica construtiva de um motor CA série é idêntica ao circuito de um motor CC<br />
série, pois sabemos que se invertermos o sentido da corrente no mesmo, sua rotação não<br />
inverte o sentido, sendo possível ser alimentado por uma corrente alternada. A única diferença<br />
é que a bobina de campo do motor série CA possui menos espiras afim de reduzir sua<br />
reatância.<br />
Esquema ligação do motor CA série<br />
Suas características gerais são as mesmas do motor CC série e suas potências não são<br />
superiores a 1CV. São muito usados em pequenos aparelhos elétricos portáteis, como máquina<br />
de furar, ventiladores, serra mármore, etc.<br />
Del – UFES 6-15 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
6.2.5- Máquinas síncronas<br />
As máquinas síncronas, apresentam uma característica muito importante por<br />
funcionarem na velocidade síncrona, pois ao invés de colocarmos uma espira em curto dentro<br />
do estator, colocamos um rotor bobinado em forma de barra como o esquema da figura a<br />
seguir.<br />
A 1<br />
C 2 B 2<br />
N<br />
S<br />
B 1<br />
C 1<br />
A 2<br />
Máquina síncrona de 2 pólos<br />
Ao ligarmos o estator da máquina, temos um campo girante que gira na velocidade<br />
síncrona. O rotor bobinado é então alimentado por uma tensão continua, e produz um campo<br />
em um único sentido e constante. Desta forma o campo magnético do rotor irá interagir com o<br />
campo girante, porém devido a inércia do rotor ele não entrará em movimento, pois a<br />
velocidade do campo girante é muito alta e ao mesmo tempo que o rotor é repelido, também é<br />
atraído pelo campo girante deixando-o imóvel.<br />
As máquinas síncronas então precisam de um acionamento auxiliar para alcançarem<br />
uma velocidade próxima da síncrona e assim ligarmos a alimentação do rotor, onde este agora<br />
acompanha a velocidade síncrona conforme figura abaixo.<br />
A 1<br />
B<br />
C 2<br />
2<br />
S N<br />
N S<br />
S N<br />
B C 1<br />
1<br />
A 2<br />
A 1<br />
A 1<br />
A 1<br />
N B<br />
C 2<br />
S B<br />
2 C 2<br />
B<br />
2 C 2<br />
2<br />
N S<br />
N S<br />
S N<br />
N S<br />
N<br />
S<br />
S<br />
N<br />
S N<br />
B 1<br />
S<br />
C 1 B C 1 1 N<br />
B C 1<br />
1<br />
A 2<br />
A 2 A 2<br />
Motor síncrono girando<br />
Com relação a este tipo de acionamento, existe um inconveniente de que são geradas<br />
tensões elevadas no circuito do rotor por este estar aberto, podendo assim comprometer a<br />
isolação do rotor.<br />
Uma outra forma de acionamento é utilizando um rotor em curto (gaiola de esquilo)<br />
construído no próprio rotor bobinado, pois o motor começará a funcionar como uma máquina<br />
de indução, sendo que após alguns instantes da partida o circuito de campo do rotor é<br />
alimentado atingindo assim a velocidade síncrona. Observe que após o motor ter atingido a<br />
velocidade síncrona, o escorregamento é zero, não tendo assim tensão induzida no rotor em<br />
curto.<br />
Del – UFES 6-16 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
6.2.5.1 – Esquema de ligação<br />
Seu esquema é muito simples, pois temos a alimentação do estator, idêntico ao motor<br />
de indução trifásico sendo em Y ou ∆ e seu rotor é alimentado por uma tensão continua de<br />
acordo com as figuras abaixo:<br />
ESQUEMA DE LIGAÇÃO<br />
6.2.5.2- Circuito equivalente<br />
O circuito equivalente de uma máquina síncrona é semelhante ao de um motor síncrono<br />
CC. A diferença consiste em que quando trabalhamos com CC o circuito de armadura não<br />
possui reatância e sim resistência pura. Nas máquinas síncronas o circuito de armadura possui<br />
então uma impedância dada por uma parcela resistiva (resistência elétrica dos enrolamentos) e<br />
uma reativa (reatância indutiva dos enrolamentos), sendo sua equação por fase dada por:<br />
V AB<br />
='Z I<br />
Onde: V AB → tensão de fase do motor<br />
' → força contra-eletromotriz do motor (f.c.e.m.)<br />
Z → impedância do estator<br />
I → corrente do estator<br />
Lembre-se que a f.c.e.m de um motor depende de sua velocidade e da corrente de<br />
excitação do campo. Como nas máquinas síncronas a velocidade é sempre constante, e<br />
mantendo a excitação constante, consequentemente o valor de sua f.c.e.m. (E’) não mudará<br />
dentro da região de operação da máquina.<br />
Del – UFES 6-17 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
Agora se mudarmos o valor da corrente de excitação de campo, podemos ter a máquina<br />
síncrona funcionando com característica indutiva, resistiva ou capacitiva.<br />
A figura abaixo representa o diagrama fasorial nas três situações.<br />
(a)<br />
I 3<br />
V AB I 2<br />
V AB<br />
V AB<br />
X<br />
X L<br />
.I<br />
X L<br />
.I<br />
L<br />
.I<br />
I (b)<br />
(c)<br />
1 ' ' '<br />
Diagrama fasorial do motor síncrono subexcitado (a), sobrexcitado (b) e superexcitado (c)<br />
Supondo que a tensão na linha sempre permaneça com seu módulo constante, no<br />
diagrama a) a corrente do estator está atrasada em relação a tensão de linha devido estar<br />
atrasada de 90° em relação a tensão no enrolamento do estator. Esta característica é de um<br />
circuito indutivo, tendo assim um fator de potência menor que 1 atrasado. Se aumentarmos a<br />
excitação chegaremos ao diagrama b), onde a corrente fica em fase com a tensão na linha nos<br />
dando um fator de potência unitário. Nestas condições o motor trabalha com seu máximo<br />
rendimento elétrico.<br />
Para todos os valores de excitação inferiores a esta, dizemos que o motor trabalha em<br />
regime sub-excitado.<br />
O contrário é observado quando aumentarmos mais ainda a excitação da máquina<br />
obtendo assim o diagrama c) onde a corrente do estator está adiantada em relação a tensão da<br />
linha. Dizemos então que o motor está super-excitado. Neste regime de funcionamento o motor<br />
pode além de fornecer energia mecânica, corrigir o fator de potência do sistema.<br />
6.2.5.3- Conjugado de um motor síncrono<br />
Uma característica importante de um motor síncrono é o de manter sua velocidade<br />
constante, pois opera na velocidade síncrona dada por ???. Outra característica é a de poder<br />
operar com fator de potência unitário, atingindo rendimentos elevados ou fator de potência<br />
capacitivo, suprindo assim o fator de potência indutivo dos motores de indução. O<br />
inconveniente de um motor síncrono é a sua partida, que deve ser feita por uma máquina<br />
auxiliar ou colocando seu circuito de campo em curto que nos trás inconvenientes já<br />
estudados.<br />
Sendo assim, seu conjugado de partida em geral é bem inferior aos motores assíncronos<br />
(motores de indução). Mesmo assim em algumas aplicações onde a velocidade é importante<br />
empregam-se motores síncronos, porém o conjugado referido a máquina nunca poderá ser<br />
maior que seu máximo conjugado, sendo este proporcional ao seno do defasamento entre a<br />
tensão de linha e a f.c.e.m. .<br />
Caso conjugado da carga seja maior que o do motor, o motor poderá perder o passo<br />
polar, ou seja, o conjugado agora produzido pelo estator no rotor será contrário, recebendo um<br />
violento impulso no sentido contrário ao movimento, fazendo o mesmo perder o sincronismo,<br />
fazendo-o parar. Em algumas situações este impulso contrário pode ser tão forte a ponto de<br />
danificar as estruturas mecânicas do motor.<br />
Del – UFES 6-18 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
6.2.6- Partida de motores trifásicos<br />
A forma mais simples de partida de um motor de indução, é a partida direta, onde<br />
ligamos o motor diretamente à rede elétrica. Este tipo de ligação nos traz alguns<br />
inconvenientes, pois sua corrente de partida assume valores muito altos, até dez vezes o valor<br />
da corrente nominal em alguns motores.<br />
Uma forma de se reduzir essa corrente, seria partir o motor sem carga, porém tal<br />
alternativa em quase todos os casos torna-se difícil, pois quase sempre estes motores são<br />
ligados com carga. Para resolver este problema é muito comum a utilização de métodos que<br />
reduzam a corrente de partida. Estes métodos são conhecidos como partida indireta.<br />
Na partida indireta a máquina é ligada através de algum dispositivo que reduz as<br />
correntes de partida, entre eles temos: Chave estrela-triângulo, chave compensadora<br />
(autotrafo) e chave eletrônica (soft-starter).<br />
a) Chave estrela-triângulo<br />
Neste método, o motor parte inicialmente ligado em estrela e após atingir 90% de sua<br />
velocidade a ligação é alterada para triângulo, onde temos a tensão nominal e<br />
conseqüentemente o conjugado máximo que o motor pode oferecer.<br />
Existem algumas limitações para o uso desta chave, pois o motor deve possuir seis<br />
terminais, o enrolamento do motor quando em triângulo deve suportar a tensão de linha da<br />
rede e sua característica de conjugado de carga deve se compatível com esta condição, pois já<br />
que a tensão é reduzida de 3 o torque é reduzido a 1/3.<br />
Quando o conjugado resistente de partida é muito alto, a corrente de comutação<br />
também pode atingir valores elevados, tornando esse método inútil. Em algumas situações a<br />
corrente de comutação pode atingir o dobro do valor da corrente de partida direta.<br />
b) Chave compensadora<br />
Neste, método utilizamos um autotransformador com vários tapes secundários, que<br />
alimenta o motor com tensões crescentes até atingir a tensão nominal. Normalmente é usado<br />
quando a chave estrela-triângulo não produz conjugado suficiente para vencer o conjugado<br />
resistente de uma carga.<br />
c) Chave eletrônica (soft-starter)<br />
Método baseado em dispositivos eletrônicos e controlado por um microprocessador.<br />
Possibilita variar continuamente a tensão aplicada sobre a máquina, desde pequenos valores<br />
até a tensão nominal sem envolver partes mecânicas móveis, utilizando tiristores para o<br />
controle da tensão e corrente.<br />
Através deste controlador podemos controlar além da velocidade e corrente de partida,<br />
podemos ainda ter controle sobre o conjugado do motor e ainda ter uma parada suave,<br />
evitando trancos no sistema, vencendo lentamente a inércia do mesmo.<br />
Del – UFES 6-19 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
EXERCÍCIOS PROPOSTOS<br />
6.1- Deseja projetar um gerador síncrono que forneça uma tensão CA de 60 Hz de freqüência<br />
com uma força motriz que gira a 200 rpm. Calcule o número de pólos desta máquina.<br />
6.2- Para o problema anterior determine a relação entre graus elétricos e graus mecânicos.<br />
6.3- Um gerador elétrico trifásico, 24 pólos, gira com velocidade de 300 rpm, com tensão<br />
induzida em cada espira sendo de 15,75 V pico , e com cada bobina possuindo 50 espiras. Pedese:<br />
a) a freqüência da tensão elétrica gerada.<br />
b) a tensão de pico e a tensão eficaz por fase.<br />
c) a tensão eficaz da linha quando o gerador é ligado em ∆ e quando ligado em Y.<br />
6.4- Em uma máquina síncrona de 8 pólos, 60 Hz, a relação entre a f.c.e.m. e a corrente<br />
excitação de campo é dada por ' = 25 I excitação . Sendo a reatância da máquina 1,2 Ω por fase,<br />
calcule sua corrente de excitação para que a mesma funcione com:<br />
a) fp = 0,8 indutivo<br />
b) fp = 1<br />
c) fp = 0,8 capacitivo<br />
Suponha a tensão de linha no barramento seja constante de 658,16 V e a máquina esteja<br />
ligada em Y. Despreze as perdas ôhmicas.<br />
6.5- Um conversor de freqüência consiste de duas máquinas síncronas acopladas, sendo o<br />
alternador de 10 pólos, 50 Hz acionado por um motor de 60 Hz. Calcule o número de pólos que<br />
o motor deve ter.<br />
6.6- Utilizando-se um motor síncrono de 60 Hz para produzir 400 Hz, especifique o menor<br />
número de pólos necessários para cada uma das máquinas síncronas, de modo a conseguir-se<br />
a conversão de freqüência.<br />
6.7- Um centrifugador de alta velocidade foi projetado para funcionar a uma velocidade<br />
constante de 1000 rpm a fim de produzir a força centrífuga necessária. Escolhe-se um motor<br />
que satisfaz a condição, mas dispõe-se apenas de 60 Hz. Especifique o conversor de freqüência<br />
que realizará a conversão necessária para que o motor funcione.<br />
6.8- Uma área industrial tem uma carga de 4000 kVA a um fator de potência de 0,6 em atraso.<br />
Um motor síncrono de 800 HP, com rendimento de 88%, é acrescido para acionar uma carga<br />
mecânica, mas, sobretudo, para melhorar o fator de potência do sistema para 0,9 em atraso.<br />
Calcule:<br />
a) o fator de potência naquela funciona o motor síncrono.<br />
b) a capacidade nominal, em kVA, do motor síncrono na situação descrita.<br />
6.9- Em uma fábrica funcionam 5 motores de indução trifásicos idênticos com a as seguintes<br />
características: 20 HP, 4 pólos, 60 Hz, f.p. = 0,8 e rendimento 90% a plena carga. Determine<br />
qual será o valor do f.p. do sistema quando ligamos uma máquina síncrona de potência 20 HP<br />
superexcitada com f.p. = 0,9 e rendimento de 95%.<br />
6.10- Um motor trifásico, ligado em ∆, 220 V (tensão de linha), 20 HP, 60 Hz, 4 pólos, f.p. =<br />
0,85, possui rendimento de 90% com carga nominal. Calcule:<br />
a) sua corrente de linha<br />
b) seu escorregamento<br />
6.11- Um motor trifásico, ligado em Y, 220 V (tensão de linha), 10 HP, 60 Hz, 6 pólos, tem as<br />
seguintes constantes em ohms por fase, referida ao estator:<br />
Del – UFES 6-20 Professor Vinícius Secchin
<strong>Capitulo</strong> 6<br />
Máquinas CA<br />
r 1 = 0,294 r 2 = 0,144<br />
x 1 = 2,503 x 2 = 1,209<br />
Desprezando-se as perdas totais por atrito, ventilação e no ferro, para um escorregamento de<br />
2%, calcule, quando o motor funciona com tensão nominal:<br />
a) velocidade em rpm do rotor<br />
b) a corrente no estator<br />
c) potência no eixo<br />
d) conjugado<br />
e) o fator de potência<br />
f) o rendimento<br />
6.12- Repita o problema 11 para um escorregamento de 3%<br />
Respostas:<br />
6.1- 36<br />
6.2- 18<br />
6.3- a) 60 Hz b) 787,5 V e 556,9 V c) 556,9 V e 964,3 V<br />
6.4- a) 12,9 A b) 15,94 A c) 18,48 A<br />
6.5- 12<br />
6.6- Alternador: 40 pólos, motor: 6 pólos<br />
6.7- Alternador: 10 pólos, motor: 72 pólos<br />
6.8- a) 0,37 b) 1832 kVA<br />
6.9- 0,875<br />
6.10- a) 51,18 A b) 10 %<br />
6.11- a) 1176 rpm b) 15,2 A c) 4400 W d) 35,75 N.m<br />
e) 0,89 f) 93,5%<br />
6.12- a) 1164 rpm b) 20,16 A c) 5677 W d) 46,6 N.m<br />
e) 0,80 f) 91,4%<br />
Del – UFES 6-21 Professor Vinícius Secchin