Relativ rörelse
Relativ rörelse
Relativ rörelse

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
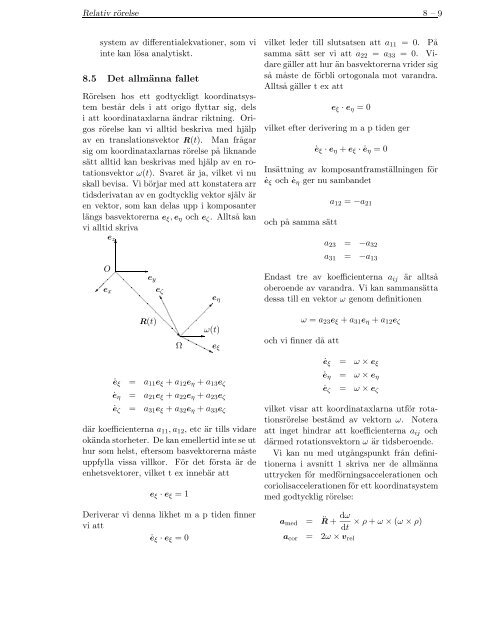
<strong>Relativ</strong> rörelse 8 – 9system av differentialekvationer, som viinte kan lösa analytiskt.8.5 Det allmänna falletRörelsen hos ett godtyckligt koordinatsystembestår dels i att origo flyttar sig, delsi att koordinataxlarna ändrar riktning. Origosrörelse kan vi alltid beskriva med hjälpav en translationsvektor R(t). Man frågarsig om koordinataxlarnas rörelse på liknandesätt alltid kan beskrivas med hjälpavenrotationsvektorω(t). Svaret är ja, vilket vi nuskall bevisa. Vi börjar med att konstatera arrtidsderivatan av en godtycklig vektor själv ären vektor, som kan delas upp i komposanterlängs basvektorerna e ξ , e η och e ζ . Alltså kanvi alltid skrivaOe ze x6-@ e y@@@@@@@Re ζeAKηA R(t)AAAH- ω(t)Ω HHHje ξvilket leder till slutsatsen att a 11 = 0. Påsamma sätt ser vi att a 22 = a 33 =0. Vidaregäller att hur än basvektorerna vrider sigsåmåste de förbli ortogonala mot varandra.Alltså gäller t ex atte ξ · e η =0vilket efter derivering m a p tiden gerė ξ · e η + e ξ · ė η =0Insättning av komposantframställningen förė ξ och ė η ger nu sambandetoch på samma sätta 12 = −a 21a 23 = −a 32a 31 = −a 13Endast tre av koefficienterna a ij är alltsåoberoende av varandra. Vi kan sammansättadessa till en vektor ω genom definitionenω = a 23 e ξ + a 31 e η + a 12 e ζoch vi finner då attė ξ = ω×e ξė ξ = a 11 e ξ + a 12 e η + a 13 e ζė η = a 21 e ξ + a 22 e η + a 23 e ζė ζ = a 31 e ξ + a 32 e η + a 33 e ζdär koefficienterna a 11 ,a 12 , etc är tills vidareokända storheter. De kan emellertid inte se uthur som helst, eftersom basvektorerna måsteuppfylla vissa villkor. För det första är deenhetsvektorer, vilket t ex innebär atte ξ · e ξ =1Deriverar vi denna likhet m a p tiden finnervi attė ξ · e ξ =0ė η = ω×e ηė ζ = ω×e ζvilket visar att koordinataxlarna utför rotationsrörelsebestämd av vektorn ω. Noteraatt inget hindrar att koefficienterna a ij ochdärmed rotationsvektorn ω är tidsberoende.Vikannumedutgångspunkt från definitionernai avsnitt 1 skriva ner de allmännauttrycken för medförningsaccelerationen ochcoriolisaccelerationen för ett koordinatsystemmed godtycklig rörelse:a med =dω¨R + × ρ + ω × (ω × ρ)dta cor = 2ω ×v rel