

Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu
Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu
Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.3.Kompletní model 18<br />
ko/J<br />
kt/J<br />
1<br />
u<br />
ks/J<br />
1<br />
s<br />
1<br />
s<br />
1<br />
Beam angle<br />
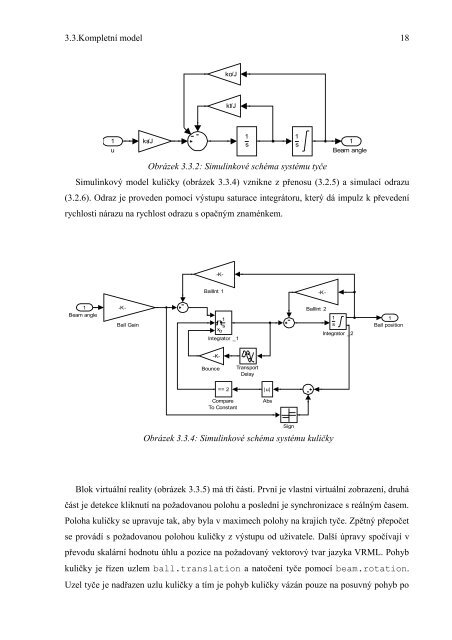
Obrázek 3.3.2: Simulinkové schéma systému tyče<br />
Simulinkový model kuličky (obrázek 3.3.4) vznikne z přenosu (3.2.5) a simulací odrazu<br />
(3.2.6). Odraz je pro<strong>ve</strong>den pomocí výstupu saturace integrátoru, který dá impulz k pře<strong>ve</strong>dení<br />
rychlosti nárazu na rychlost odrazu s opačným znaménkem.<br />
Obrázek 3.3.3: Zapojení s PID reguátorem<br />
-K-<br />
BallInt 1<br />
-K-<br />
1<br />
Beam angle<br />
-K-<br />
Ball Gain<br />
1<br />
s<br />
x o<br />
Integrator _1<br />
BallInt 2<br />
1<br />
s<br />
Integrator _2<br />
1<br />
Ball position<br />
-K-<br />
Bounce<br />
Transport<br />
Delay<br />
== 2<br />
Compare<br />
To Constant<br />
|u|<br />
Abs<br />
Sign<br />
Obrázek 3.3.4: Simulinkové schéma systému kuličky<br />
Blok virtuální reality (obrázek 3.3.5) má tři části. První je vlastní virtuální zobrazení, druhá<br />
část je detekce kliknutí na požadovanou polohu a poslední je synchronizace s reálným časem.<br />
Poloha kuličky se upravuje tak, aby byla v maximech polohy na krajích tyče. Zpětný přepočet<br />
se provádí s požadovanou polohou kuličky z výstupu od uživatele. Další úpravy spočívají v<br />
převodu skalární hodnotu úhlu a pozice na požadovaný <strong>ve</strong>ktorový tvar jazyka VRML. Pohyb<br />
kuličky je řízen uzlem ball.translation a natočení tyče pomocí beam.rotation.<br />
Uzel tyče je nadřazen uzlu kuličky a tím je pohyb kuličky vázán pouze na posuvný pohyb po














