

Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu
Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu
Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4.2.Model kyvadla 28<br />
Acceleration<br />
1<br />
Dot Product<br />
1/(m)<br />
Gain 1<br />
Integrator<br />
Gain 2<br />
1<br />
s<br />
1<br />
s<br />
Integrator 1<br />
1<br />
Angle<br />
2*d*l<br />
Gain 3<br />
Trigonometric<br />
Function 2<br />
3*g/l/2<br />
sin<br />
Gain 4<br />
3/l/2<br />
cos<br />
Trigonometric<br />
Function<br />
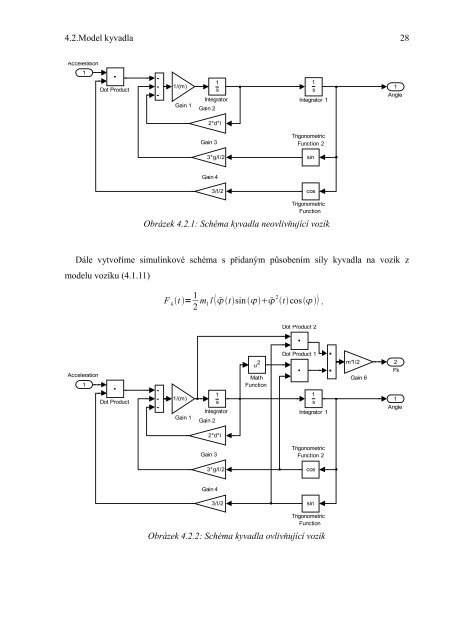
Obrázek 4.2.1: Schéma kyvadla neovlivňující vozík<br />
Dále vytvoříme simulinkové schéma s přidaným působením síly kyvadla na vozík z<br />
modelu vozíku (4.1.11)<br />
F k<br />
t = 1 2 m 1<br />
l ¨tsin ¨ 2 tcos .<br />
Dot Product 2<br />
Acceleration<br />
1<br />
Math<br />
Function<br />
Dot Product 1<br />
m*l/2<br />
Gain 6<br />
2<br />
Fk<br />
Dot Product<br />
1/(m)<br />
Gain 1<br />
1<br />
s<br />
Integrator<br />
Gain 2<br />
u 2 1<br />
s<br />
Integrator 1<br />
1<br />
Angle<br />
2*d*l<br />
Gain 3<br />
Trigonometric<br />
Function 2<br />
3*g/l/2<br />
cos<br />
Gain 4<br />
3/l/2<br />
sin<br />
Trigonometric<br />
Function<br />
Obrázek 4.2.2: Schéma kyvadla ovlivňující vozík














