

Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu
Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu
Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4.4.Regulace in<strong>ve</strong>rzních kyvadel 32<br />
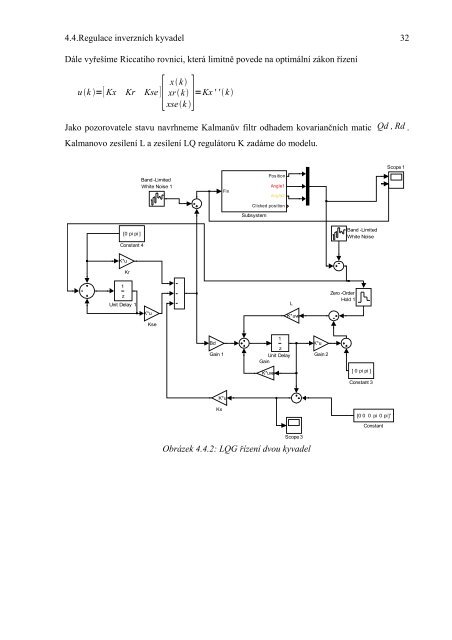
Dále vyřešíme Riccatiho rovnici, která limitně po<strong>ve</strong>de na optimální zákon řízení<br />
][<br />
x k<br />
uk =[ Kx Kr Kse xrk ' ' k<br />
xsek ]=Kx<br />
Jako pozorovatele stavu navrhneme Kalmanův filtr odhadem kovariančních matic Qd , Rd .<br />
Kalmanovo zesílení L a zesílení LQ regulátoru K zadáme do modelu.<br />
Band -Limited<br />
White Noise 1<br />
Fin<br />
Position<br />
Angle1<br />
Angle2<br />
Clicked position<br />
Subsystem<br />
Scope 1<br />
[0 pi pi ]<br />
Constant 4<br />
Band -Limited<br />
White Noise<br />
K*u<br />
Kr<br />
1<br />
z<br />
Unit Delay 1<br />
K*u<br />
Kse<br />
L<br />
K*u<strong>ve</strong>c<br />
Zero -Order<br />
Hold 1<br />
Bd<br />
Gain 1<br />
1<br />
z<br />
Unit Delay<br />
Gain<br />
K*u<strong>ve</strong>c<br />
K*u<br />
Gain 2<br />
[ 0 pi pi ]<br />
Constant 3<br />
K*u<br />
Kx<br />
[0 0 0 pi 0 pi ]'<br />
Constant<br />
Scope 3<br />
Obrázek 4.4.2: LQG řízení dvou kyvadel














