

Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu
Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu
Vizualizace dynamických modelů ve Virtual RealityToolboxu v Matlabu

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4.3.Kompletní model 30<br />
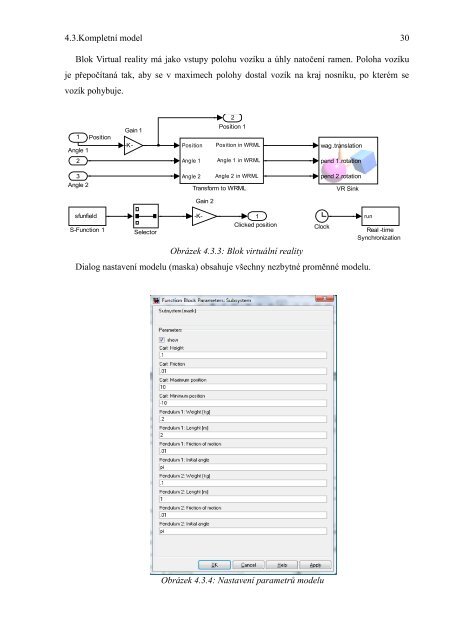
Blok <strong>Virtual</strong> reality má jako vstupy polohu vozíku a úhly natočení ramen. Poloha vozíku<br />
je přepočítaná tak, aby se v maximech polohy dostal vozík na kraj nosníku, po kterém se<br />
vozík pohybuje.<br />
2<br />
1 Position<br />
Angle 1<br />
Gain 1<br />
-K-<br />
Position<br />
Position 1<br />
Position in WRML<br />
wag.translation<br />
2<br />
Angle 1<br />
Angle 1 in WRML<br />
pend 1.rotation<br />
3<br />
Angle 2<br />
Angle 2 Angle 2 in WRML<br />
Transform to WRML<br />
Gain 2<br />
pend 2.rotation<br />
VR Sink<br />
sfunfield<br />
S-Function 1<br />
Selector<br />
-K-<br />
1<br />
Clicked position<br />
Obrázek 4.3.3: Blok virtuální reality<br />
Clock<br />
Dialog nasta<strong>ve</strong>ní modelu (maska) obsahuje všechny nezbytné proměnné modelu.<br />
run<br />
Real -time<br />
Synchronization<br />
Obrázek 4.3.4: Nasta<strong>ve</strong>ní parametrů modelu














