Justyna Signerska i Krzysztof Bartoszek – “Logika rozmyta (fuzzy
Justyna Signerska i Krzysztof Bartoszek – “Logika rozmyta (fuzzy
Justyna Signerska i Krzysztof Bartoszek – “Logika rozmyta (fuzzy

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
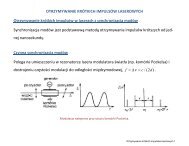
Nastȩpnie dla każdego wektora danych wejściowych tworzymy regu̷lȩ. Rozpatrzmy i<strong>–</strong>ty wektor<br />
[x 1 (i), . . . , x n (i), d(i)]. Dla danej sk̷ladowej x k (i) przyjmuje siȩ, że jest on w tym zbiorze,<br />
w którym jest max po wszystkich funkcjach przynależności. Na powyższym wykresie bȩdzie<br />
x k (1) IS S. W efekcie powstaje regu̷la,<br />
IF (x 1 IS A 1 i AND . . . AND x n IS A n i ) THEN y IS B i .<br />
Każdej regule przypisuje siȩ stopień prawdziwości,<br />
SP (R i ) = µ A 1<br />
i<br />
(x 1 (i)) · . . . · µ A n<br />
i<br />
(x n (i))µ Bi (d(i))<br />
Baza regu̷l bȩdzie sk̷ladać siȩ z regu̷l wygenerowanych przez każdy wektor danych. Jeżeli siȩ<br />
okaże, że dwie regu̷ly s¸a sprzecze z sob¸a, tzn. maj¸a te same poprzedniki implikacji ale różne<br />
nastȩpniki to wybierana jest ta regu̷la, która ma wyższy stopień prawdziwości.<br />
5.1 Wyostrzanie<br />
Niech na wejściu systemu pojawi siȩ x = (x 1 , . . . , x n ). Dla każdej regu̷ly określamy jej stopień<br />
aktywności,<br />
τ (i) = µ A 1<br />
i<br />
(x 1 ) · . . . · µ A n<br />
i<br />
(x n ).<br />
Wyjście sytemu bȩdzie,<br />
y =<br />
∑ M<br />
i=1 τ (i) y (i)<br />
∑ M<br />
i=1 τ (i) ,<br />
gdzie y (i) takie, że<br />
µ B i(y (i) ) = max µ<br />
y B i(y).<br />
6 Zastosowania<br />
6.1 Samochodowy system ABS [3]<br />
System ABS (ang. Anti-lock Brake System) instaluje siȩ w samochodach, aby zapewnić<br />
maksymaln¸a kontrolȩ nad pojazdem. W sytuacji niebezbiecznej ważnym czynnikiem jest<br />
czas - chodzi o to, aby umożliwić jak najszybsze wyhamowanie pojazdu w razie potrzeby.<br />
Jednak problem ten okazuje siȩ być z̷lożony. Ma na to wp̷lyw wiele czynników, np. prȩdkość<br />
samochodu, si̷la nacisku na peda̷l gazu/hamulec, rodzaj nawierzchni, warunki atmosferyczne.<br />
Wszystkie te elementy nieustannie siȩ zmieniaj¸a podczas jazdy i dlatego baza regu̷l potrzebnych<br />
do sterowania takim system musia̷laby być bardzo duża, gdybyśmy chcieli uwzglȩdnić<br />
wszystkie możliwe ,,kombinacje”. W konsekwencji również ewaluacja tych regu̷l zajȩ̷laby zbyt<br />
wiele czasu, co mogloby mieć nawet tragiczne konsekwencje. St¸ad pomys̷l, aby system ABS<br />
oparty by̷l na wnioskowaniu rozmytym, gdzie wszystkie zmienne i przyjmowane przez nie<br />
wartości opisane by̷lyby za pomoc¸a odpowiednich funkcji przynależności. Jako pierwsze systemy<br />
kontrolowania rozmytego wprowadzi̷ly w swoich pojazdach koncerny Mitsubishi (1993<br />
21