Elektronika 2012-08 I.pdf - Instytut Systemów Elektronicznych
Elektronika 2012-08 I.pdf - Instytut Systemów Elektronicznych
Elektronika 2012-08 I.pdf - Instytut Systemów Elektronicznych

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
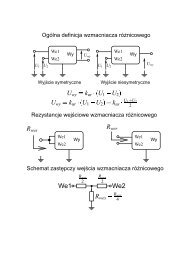
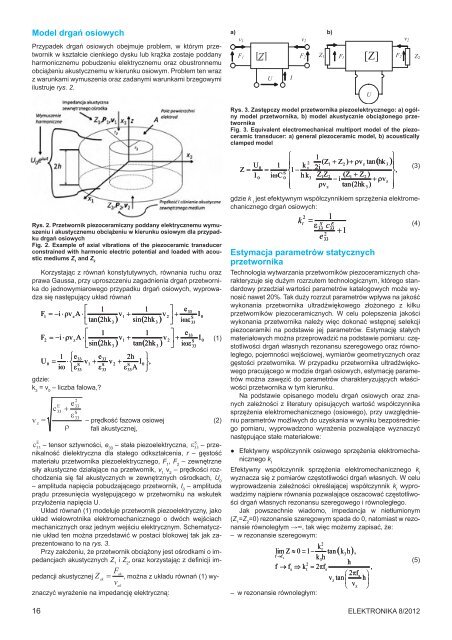
Model drgań osiowychPrzypadek drgań osiowych obejmuje problem, w którym przetwornikw kształcie cienkiego dysku lub krążka zostaje poddanyharmonicznemu pobudzeniu elektrycznemu oraz obustronnemuobciążeniu akustycznemu w kierunku osiowym. Problem ten wrazz warunkami wymuszenia oraz zadanymi warunkami brzegowymiilustruje rys. 2.a) b)v 1 v 2F 1 F 2UIZ 1 [Z]Z 2F 1F 2v 2URys. 3. Zastępczy model przetwornika piezoelektrycznego: a) ogólnymodel przetwornika, b) model akustycznie obciążonego przetwornikaFig. 3. Equivalent electromechanical multiport model of the piezoceramictransducer: a) general piezoceramic model, b) acousticallyclamped modelRys. 2. Przetwornik piezoceramiczny poddany elektrycznemu wymuszeniui akustycznemu obciążeniu w kierunku osiowym dla przypadkudrgań osiowychFig. 2. Example of axial vibrations of the piezoceramic transducerconstrained with harmonic electric potential and loaded with acousticmediums Z 1and Z 2Korzystając z równań konstytutywnych, równania ruchu orazprawa Gaussa, przy uproszczeniu zagadnienia drgań przetwornikado jednowymiarowego przypadku drgań osiowych, wyprowadzasię następujący układ równań⎡11⎤e33 F2= −i⋅ρvzA⋅⎢v1+v2⎥+IS0 (1)⎣sin( 2hk3) tan( 2hk3)⎦iωε33gdzie:k 3= v 0– liczba falowa,?vz=16⎡11⎤e33F1= −i⋅ρvzA⋅⎢v1+v2⎥+S⎣tan( 2hk3) sin( 2hk3)⎦iωε33U01⎧e=⋅⎨iω⎩εcE3333S332e33+ε S33ρ– prędkość fazowa osiowej (2)fali akustycznej,ESc33– tensor sztywności, e 33– stała piezoelektryczna, ε33 – przenikalnośćdielektryczna dla stałego odkształcenia, r – gęstośćmateriału przetwornika piezoelektrycznego, F 1, F 2– zewnętrznesiły akustyczne działające na przetwornik, v 1,v 2– prędkości rozchodzeniasię fal akustycznych w zewnętrznych ośrodkach, U 0– amplituda napięcia pobudzającego przetwornik, I 0– amplitudaprądu przesunięcia występującego w przetworniku na wskutekprzyłożenia napięcia U.Układ równań (1) modeluje przetwornik piezoelektryczny, jakoukład wielowrotnika elektromechanicznego o dwóch wejściachmechanicznych oraz jednym wejściu elektrycznym. Schematycznieukład ten można przedstawić w postaci blokowej tak jak zaprezentowanoto na rys. 3.Przy założeniu, że przetwornik obciążony jest ośrodkami o impedancjachakustycznych Z 1i Z 2, oraz korzystając z definicji im-pedancji akustycznejev1+Sε3333Fv2h⎫+I,S 0 ⎬ε33A⎭akZ =ak, można z układu równań (1) wyznaczyćwyrażenie na impedancję elektryczną:v2akI0⎧1⎫ 2 ( ZZ ) v tan( hk )U 1 k1 2 z 30⎪+ + ρt(3)2i⎪Z = = 1,S ⎨ −Z Z ( ZZ )⎬I0iωC0 ⎪ h k1 2 1+32−i+ ρv⎪z⎪⎩ρvztan( 2hk3)⎪⎭gdzie k tjest efektywnym współczynnikiem sprzężenia elektromechanicznegodrgań osiowych:k2=1ε33c33+12e tSE(4)33Estymacja parametrów statycznychprzetwornikaTechnologia wytwarzania przetworników piezoceramicznych charakteryzujesię dużym rozrzutem technologicznym, którego standardowyprzedział wartości parametrów katalogowych może wynosićnawet 20%. Tak duży rozrzut parametrów wpływa na jakośćwykonania przetwornika ultradźwiękowego złożonego z kilkuprzetworników piezoceramicznych. W celu polepszenia jakościwykonania przetwornika należy więc dokonać wstępnej selekcjipiezoceramiki na podstawie jej parametrów. Estymację stałychmateriałowych można przeprowadzić na podstawie pomiaru: częstotliwościdrgań własnych rezonansu szeregowego oraz równoległego,pojemności wejściowej, wymiarów geometrycznych orazgęstości przetwornika. W przypadku przetwornika ultradźwiękowegopracującego w modzie drgań osiowych, estymację parametrówmożna zawęzić do parametrów charakteryzujących właściwościprzetwornika w tym kierunku.Na podstawie opisanego modelu drgań osiowych oraz znanychzależności z literatury opisujących wartość współczynnikasprzężenia elektromechanicznego (osiowego), przy uwzględnieniuparametrów możliwych do uzyskania w wyniku bezpośredniegopomiaru, wyprowadzono wyrażenia pozwalające wyznaczyćnastępujące stałe materiałowe:● Efektywny współczynnik osiowego sprzężenia elektromechanicznegok tEfektywny współczynnik sprzężenia elektromechanicznego k twyznacza się z pomiarów częstotliwości drgań własnych. W celuwyprowadzenia zależności określającej współczynnik k twyprowadzimynajpierw równania pozwalające oszacować częstotliwościdrgań własnych rezonansu szeregowego i równoległego.Jak powszechnie wiadomo, impedancja w nietłumionym(Z 1=Z 2=0) rezonansie szeregowym spada do 0, natomiast w rezonansierównoległym →∞, tak więc możemy zapisać, że:– w rezonansie szeregowym:2ktlim Z≈0=1−tan( k3h),f→fs k3h(5)2hf→fs⇒kt=2πfs,⎛2πfs⎞vztan⎜h⎟v⎝z⎠– w rezonansie równoległym:<strong>Elektronika</strong> 8/<strong>2012</strong>