Elektronika 2012-08 I.pdf - Instytut Systemów Elektronicznych
Elektronika 2012-08 I.pdf - Instytut Systemów Elektronicznych
Elektronika 2012-08 I.pdf - Instytut Systemów Elektronicznych

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
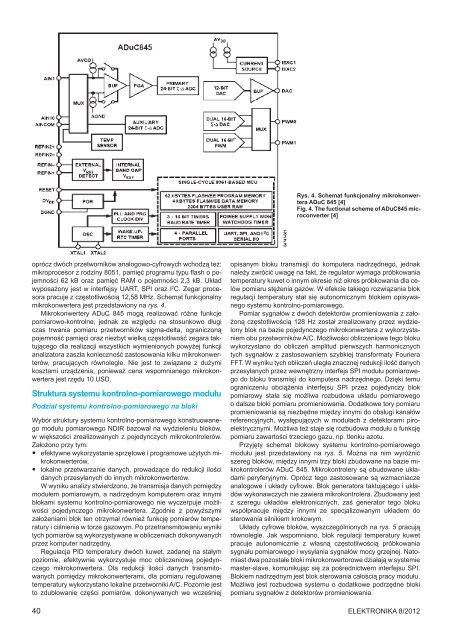
Rys. 4. Schemat funkcjonalny mikrokonwerteraADuC 845 [4]Fig. 4. The fuctional scheme of ADuC845 microconverter[4]oprócz dwóch przetworników analogowo-cyfrowych wchodzą też:mikroprocesor z rodziny 8051, pamięć programu typu flash o pojemności62 kB oraz pamięć RAM o pojemności 2,3 kB. Układwyposażony jest w interfejsy UART, SPI oraz I 2 C. Zegar procesorapracuje z częstotliwością 12,58 MHz. Schemat funkcjonalnymikrokonwertera jest przedstawiony na rys. 4.Mikrokonwertery ADuC 845 mogą realizować różne funkcjepomiarowo-kontrolne, jednak ze względu na stosunkowo długiczas trwania pomiaru przetworników sigma-delta, ograniczonąpojemność pamięci oraz niezbyt wielką częstotliwość zegara taktującegodla realizacji wszystkich wymienionych powyżej funkcjianalizatora zaszła konieczność zastosowania kilku mikrokonwerterów,pracujących równolegle. Nie jest to związane z dużymikosztami urządzenia, ponieważ cena wspomnianego mikrokonwerterajest rzędu 10 USD.Struktura systemu kontrolno-pomiarowego modułuPodział systemu kontrolno-pomiarowego na blokiWybór struktury systemu kontrolno-pomiarowego konstruowanegomodułu pomiarowego NDIR bazował na wydzieleniu bloków,w większości zrealizowanych z pojedynczych mikrokontrolerów.Założono przy tym:● efektywne wykorzystanie sprzętowe i programowe użytych mikrokonwerterów,● lokalne przetwarzanie danych, prowadzące do redukcji ilościdanych przesyłanych do innych mikrokonwerterów.W wyniku analizy stwierdzono, że transmisja danych pomiędzymodułem pomiarowym, a nadrzędnym komputerem oraz innymiblokami systemu kontrolno-pomiarowego nie wyczerpuje możliwościpojedynczego mikrokonwertera. Zgodnie z powyższymizałożeniami blok ten otrzymał również funkcję pomiarów temperaturyi ciśnienia w torze gazowym. Po przetransmitowaniu wynikitych pomiarów są wykorzystywane w obliczeniach dokonywanychprzez komputer nadrzędny.Regulacja PID temperatury dwóch kuwet, zadanej na stałympoziomie, efektywnie wykorzystuje moc obliczeniową pojedynczegomikrokonwertera. Dla redukcji ilości danych transmitowanychpomiędzy mikrokonwerterami, dla pomiaru regulowanejtemperatury wykorzystano lokalne przetworniki A/C. Pozornie jestto zdublowanie części pomiarów, dokonywanych we wcześniej40opisanym bloku transmisji do komputera nadrzędnego, jednaknależy zwrócić uwagę na fakt, że regulator wymaga próbkowaniatemperatury kuwet o innym okresie niż okres próbkowania dla celówpomiaru stężenia gazów. W efekcie takiego rozwiązania blokregulacji temperatury stał się autonomicznym blokiem opisywanegosystemu kontrolno-pomiarowego.Pomiar sygnałów z dwóch detektorów promieniowania z założonączęstotliwością 128 Hz został zrealizowany przez wydzielonyblok na bazie pojedynczego mikrokonwertera z wykorzystaniemobu przetworników A/C. Możliwości obliczeniowe tego blokuwykorzystano do obliczeń amplitud pierwszych harmonicznychtych sygnałów z zastosowaniem szybkiej transformaty FourieraFFT. W wyniku tych obliczeń uległa znacznej redukcji ilość danychprzesyłanych przez wewnętrzny interfejs SPI modułu pomiarowegodo bloku transmisji do komputera nadrzędnego. Dzięki temuograniczeniu obciążenia interfejsu SPI przez pojedynczy blokpomiarowy stała się możliwa rozbudowa układu pomiarowegoo dalsze bloki pomiaru promieniowania. Dodatkowe tory pomiarupromieniowania są niezbędne między innymi do obsługi kanałówreferencyjnych, występujących w modułach z detektorami piroelektrycznymi.Możliwa też staje się rozbudowa modułu o funkcjępomiaru zawartości trzeciego gazu, np. tlenku azotu.Przyjęty schemat blokowy systemu kontrolno-pomiarowegomodułu jest przedstawiony na rys. 5. Można na nim wyróżnićszereg bloków, między innymi trzy bloki zbudowane na bazie mikrokontrolerówADuC 845. Mikrokontrolery są obudowane układamiperyferyjnymi. Oprócz tego zastosowane są wzmacniaczeanalogowe i układy cyfrowe. Blok generatora taktującego i układówwykonawczych nie zawiera mikrokontrolera. Zbudowany jestz szeregu układów elektronicznych, zaś generator tego blokuwspółpracuje między innymi ze specjalizowanym układem dosterowania silnikiem krokowym.Układy cyfrowe bloków, wyszczególnionych na rys. 5 pracująrównolegle. Jak wspomniano, blok regulacji temperatury kuwetpracuje autonomicznie z własną częstotliwością próbkowaniasygnału pomiarowego i wysyłania sygnałów mocy grzejnej. Natomiastdwa pozostałe bloki mikrokonwertorowe działają w systemiemaster-slave, komunikując się za pośrednictwem interfejsu SPI.Blokiem nadrzędnym jest blok sterowania całością pracy modułu.Możliwa jest rozbudowa systemu o dodatkowe podrzędne blokipomiaru sygnałów z detektorów promieniowania.<strong>Elektronika</strong> 8/<strong>2012</strong>