ÐÑогÑаммиÑÑемÑй конÑÑÐ¾Ð»Ð»ÐµÑ Ð ÑководÑÑво ... - FF-Automation
ÐÑогÑаммиÑÑемÑй конÑÑÐ¾Ð»Ð»ÐµÑ Ð ÑководÑÑво ... - FF-Automation
ÐÑогÑаммиÑÑемÑй конÑÑÐ¾Ð»Ð»ÐµÑ Ð ÑководÑÑво ... - FF-Automation

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Стр. 9-4<br />
31/08/98<br />
AutoLog 32 Руководство пользователя<br />
9.4 Настройка регуляторов<br />
На практике очень важно выбрать значения параметров регулирования P, I и D. Параметры<br />
регулятора могут быть рассчитаны чисто математически и с помощью диаграммы Боде, но эти<br />
способы подчас очень трудоёмки.<br />
Обычно регуляторы настраиваются по методикам полученным на основе экспериментальных<br />
данных. Ниже приведены два простых и эффективных метода настройки регуляторов.<br />
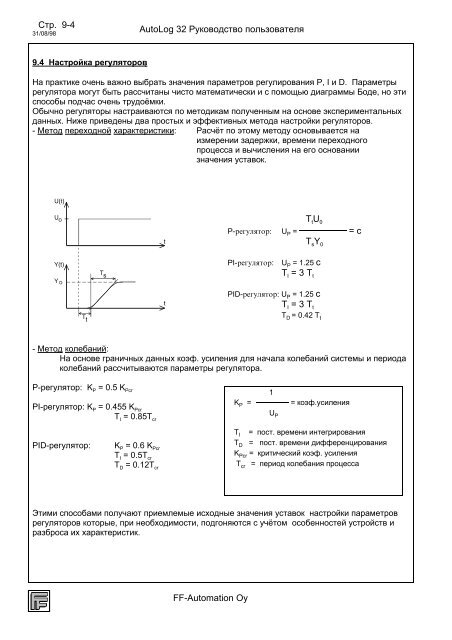
- Метод переходной характеристики: Расчёт по этому методу основывается на<br />
измерении задержки, времени переходного<br />
процесса и вычисления на его основании<br />
значения уставок.<br />
T t U 0<br />
P-регулятор: U P = = c<br />
T s Y 0<br />
PI-регулятор:<br />
U P = 1.25 c<br />
T I = 3 T t<br />
PID-регулятор: U P = 1.25 c<br />
T I = 3 T t<br />
T D = 0.42 T t<br />
- Метод колебаний:<br />
На основе граничных данных коэф. усиления для начала колебаний системы и периода<br />
колебаний рассчитываются параметры регулятора.<br />
P-регулятор: K P = 0.5 K Pcr<br />
PI-регулятор: K P = 0.455 K Pcr<br />
T I = 0.85T cr<br />
K P =<br />
1<br />
U P<br />
= коэф.усиления<br />
PID-регулятор:<br />
K P = 0.6 K Pcr<br />
T I = 0.5T cr<br />
T D = 0.12T cr<br />
T I = пост. времени интегрирования<br />
T D = пост. времени дифференцирования<br />
K Pcr = критический коэф. усиления<br />
T cr = период колебания процесса<br />
Этими способами получают приемлемые исходные значения уставок настройки параметров<br />
регуляторов которые, при необходимости, подгоняются с учётом особенностей устройств и<br />
разброса их характеристик.<br />
<strong>FF</strong>-<strong>Automation</strong> Oy