Prozessrechner - TUHH
Prozessrechner - TUHH
Prozessrechner - TUHH

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Automation und Prozessrechentechnik<br />
Sommersemester 2011<br />
Datenverbindungen, Bussysteme<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
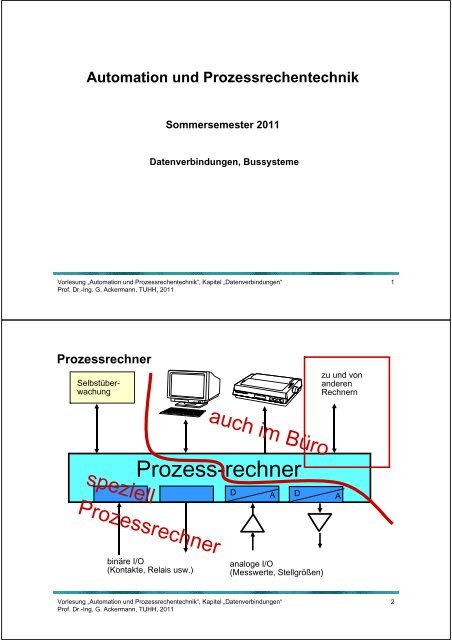
<strong>Prozessrechner</strong><br />
Selbstüberwachung<br />
Prozess-rechner<br />
speziell<br />
<strong>Prozessrechner</strong><br />
binäre I/O<br />
(Kontakte, Relais usw.)<br />
auch im Büro<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
D A D A<br />
analoge I/O<br />
(Messwerte, Stellgrößen)<br />
zu und von<br />
anderen<br />
Rechnern<br />
1<br />
2
Beispiel für eine verteilte Automation<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
dezentrale Rechner in einem Schaltschrank<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
3<br />
4
Motive und technische Voraussetzungen<br />
Kosten:<br />
A) zentraler Rechner, jeder Sensor über Kabel mit dem zentralen Rechner verbunden<br />
B) viele kleine Rechner, die lokal die Messwerte „einsammeln“ und vorverarbeiten,<br />
dann über einen Datenbus an eine Zentrale leiten<br />
Heute ist B) billiger. Außerdem ist B) modularer, also flexibler an die Anforderungen<br />
und den Umfang einer Anlage anzupassen.<br />
Zuverlässigkeit, Verfügbarkeit:<br />
A) Bei Ausfall des zentralen Rechners ist eine große Anzahl von Automatisierungsfunktionen<br />
nicht verfügbar. Handbetrieb möglich??<br />
B) Ein Ausfall beeinträchtigt nur einen Teil aller Funktionen. Handbetrieb eher möglich.<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Beispiel für eine verteilte Automation<br />
Bussystem redundant<br />
mehrere Bildschirme<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Basissystem<br />
mit eigenem Bus<br />
Automatisierungsfunktionen aufgeteilt<br />
5<br />
Basissystem<br />
mit mehreren<br />
Bedientableaus<br />
6
Bussystem: Prinzip<br />
• mehrere parallele Leitungen (meist zwei + ggf. Ausgleichs/Erdleitung),<br />
• an die alle Teilnehmer parallel angeschlossen sind<br />
• und nach definierten Regeln untereinander (binäre) Daten austauschen.<br />
Prinzip:<br />
Nur einer darf senden, alle dürfen hören.<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Bussystem: Prinzip<br />
Das Regelwerk für ein Bussystem wird Protokoll genannt. Es enthält Regeln z. B. zu:<br />
• Leitungsart, Spannungen und Ströme, was ist „0“ und was ist „1“.<br />
• Wie wird eine Reihe von Bits übertragen, was passiert bei Übertragungsstörungen?<br />
• Wie wird die Bedeutung der Daten definiert?<br />
•......<br />
• Wie wird geregelt, wann wer senden darf?<br />
• Was passiert, wenn ein Teilnehmer ein- oder ausgeschaltet wird?<br />
•.....<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Es ist also sehr viel festzulegen,<br />
das muss geordnet werden.<br />
7<br />
8
Idee der Schichten 1<br />
A schreibt einen Brief an B<br />
Sprache, Terminologie,....<br />
Zeichensatz (Lateinisch, Sütterlin, Brailleschrift)<br />
gibt ihn zur Post erhält ihn von der Post<br />
Müssen sich A und B darum kümmern, oder<br />
auch nur wissen, wie die Post den Briefumschlag befördert?<br />
(Bahn, Lkw,...)? Nur die zugesicherte Leistung ist wichtig:<br />
„Kommt am nächsten Tag an, wenn....“<br />
Muss (oder darf) die Post wissen, was sich in dem Briefumschlag<br />
befindet?<br />
Nur die spezifizierten Beförderungsbedingungen müssen<br />
eingehalten sein!<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Idee der Schichten 2<br />
A schreibt einen Brief an B<br />
Sprache, Terminologie,....<br />
Zeichensatz (Lateinisch, Sütterlin, Brailleschrift)<br />
stellt Dienst zu Verfügung<br />
Die Post kann ihre Beförderungsarten ändern, ohne dass das<br />
der Nutzer des Dienstes merkt, sofern der Dienst erbracht wird.<br />
Sendendes Postamt Empfangendes Postamt<br />
diverse Verabredungen zu Terminen, Lademöglichkeiten<br />
Bundesbahn, Fluggesellschaften.....<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
9<br />
10
Schichten-Modell<br />
Die verschiedenen „Regeln“ innerhalb eines Protokolls werden in Schichten eingeteilt<br />
Sender<br />
Methode 1, um ein<br />
Byte zu übertragen<br />
Methode 1, um ein<br />
Bit zu übertragen<br />
Methode 2, um ein<br />
Bit zu übertragen<br />
Diese Methode 1 kann durch<br />
Methode 2 ersetzt werden,<br />
ohne dass die übergeordneten<br />
Schichten davon beeinflusst sind!<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
ISO-OSI-Referenzmodell 1<br />
Schicht 3<br />
Schicht 2<br />
Schicht 1<br />
Wie wird Block von<br />
Bits übertragen?<br />
Wie wird physikalisch<br />
ein Bit übertragen?<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Empfänger<br />
Methode 1, um ein<br />
Byte zu übertragen<br />
Methode 1, um ein<br />
Bit zu übertragen<br />
Das Referenzmodell ist eine Art Gliederung für die Spezifikation<br />
von Datenübertragungs-Protokollen, 7 Schichten sind definiert.<br />
Interface 3/4<br />
Interface 2/3<br />
Interface 1/2<br />
Schicht 3 Protokoll<br />
Schicht 2 Protokoll<br />
Schicht 1 Protokoll<br />
physikalisches Medium<br />
Methode 2, um ein<br />
Bit zu übertragen<br />
Schicht 3<br />
Schicht 2<br />
Schicht 1<br />
Es sind nicht immer Aufgaben auf allen Ebenen zu erfüllen,<br />
deshalb sind bei vielen Protokollen einzelne Schichten nicht vorhanden.<br />
11<br />
12
ISO-OSI-Referenzmodell 2<br />
7: Application Layer, Verarbeitungsschicht (Anwendungsschicht, Anwenderebene): File-<br />
Transfer, E-mail, Virtual Terminal (Remote login), Directory usw.<br />
6: Presentation Layer, Darstellungsschicht (Datendarstellungsschicht, Datenbereitstellungsebene):<br />
Standardisierte Datenstrukturen (u. a. Kodierung, Kompression)<br />
5: Session Layer, Kommunikationsschicht (Kommunikationssteuerungsschicht, Steuerung<br />
logischer Verbindungen, Sitzungsebene): Hilft Zusammenbrüche der Sitzung und<br />
ähnliche Probleme zu beheben<br />
4: Transport Layer Transportschicht (Ende-zu-Ende-Kontrolle, Transport-Kontrolle): Stellt<br />
höheren Schichten zuverlässige Ende-zu-Ende-Verbindungen (zwischen Sender und<br />
Empfänger) zur Verfügung<br />
3: Network Layer, Vermittlungsschicht (Paketebene, Netzwerkebene): Routing der<br />
Datenpakete<br />
2: Data Link Layer, Sicherungsschicht (Verbindungssicherungsschicht, Verbindungsebene,<br />
Prozedurebene): Aufteilung des Bitstromes in Einheiten (Pakete) und Austausch dieser<br />
Einheiten unter Anwendung eines Protokolls<br />
1: Physical Layer, Bitübertragungsschicht (physikalische Ebene): Übertragung des<br />
Bitstromes über einen Kommunikationskanal. Standardisierung der Netzwerk-Leitungen<br />
und -Anschlüsse sowie ihrer physikalischen Eigenschaften.<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Internet-Protokollstack als Beispiel<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
13<br />
14
Einige Feldbussysteme<br />
FILBUS BITBUS WorldFIP PROFIBUS-DP CAN<br />
typ. Geschwindigk. 375 Kbit/s 375 Kbit/s 1 Mbit/s 500 Kbit/s bis 1 Mbit/s<br />
max. Anzahl Knoten<br />
mit Verstärker<br />
250 250 256 127<br />
ohne Verstärker 32 32 64 32 30<br />
max. Entfernung<br />
mit Verstärker<br />
13,2 km 13,2 km >10 km<br />
ohne Verstärker 1,2 km 1,2 km 2 km<br />
100 m 12 Mb/s<br />
1,2 km 94 Kb/s<br />
40m 1Mb/s<br />
1km 20 Kb/s<br />
Zugriffsverteilung Master/Slave Master/Slave Bus Arbiter Token passing CSMA<br />
Kabeltyp Twisted pair Twisted pair Twisted pair Twisted pair Twisted pair<br />
Header<br />
Datengröße<br />
Vorteile<br />
Hauptanwendungen<br />
1 bis 256<br />
Byte<br />
Ereignisgesteuerte<br />
I/0 Software<br />
in Modulen<br />
Fernabfrage<br />
I/0 Datenerfassung<br />
1 bis 13 oder 52<br />
Byte<br />
Sehr verbreitet<br />
Knoten<br />
programmierbar<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Zur Signalausbreitung<br />
Busabschluss!<br />
1 Bit<br />
20 m<br />
intelligente I/0<br />
Module Prozesssteuerung<br />
1 bis 128 Byte 250 Byte 8 Byte<br />
Verteilte<br />
Datenbasis,<br />
sehr<br />
deterministisch<br />
v 0,7c 200m/ s<br />
Prozess- und<br />
Maschinensteuerung<br />
in<br />
Echtzeit<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Sehr verbreitet,<br />
leistungsfähiges<br />
Signalisierungs-<br />
Verfahren<br />
Datenaustausch<br />
zwischen SPS,<br />
Fabriken<br />
Beispiel: 10 MBit/s, also 1 Bit ist 20 m lang. Es befinden sich somit immer<br />
mehrere Bits hintereinander auf dem Weg vom Sender zum Empfänger.<br />
Max. Länge ist deshalb oft abhängig von Datenrate.<br />
kostengünstig,<br />
für Kurzmitteilungen<br />
geeignet<br />
Sensoren und<br />
Stellglieder,<br />
Kfz-Bereich<br />
15<br />
16
Zum Busabschluss 1<br />
Wegen Induktivität und Kapazität des<br />
Kabels bedeuten Strom und Spannung<br />
Energie<br />
1 2<br />
W Li 2<br />
1 2<br />
W Cu 2<br />
Die räumliche Bewegung eines Bits<br />
ist somit die Bewegung von<br />
Energie (= Leistung).<br />
An einem offenen Kabelende ist i = 0, also P = 0.<br />
Das Energie-Paket wird reflektiert.<br />
(Bei einem Kurzschluss ist u = 0).<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Zum Busabschluss 2<br />
Durch die Reflektion ist die Spannung<br />
am Empfänger die Überlagerung<br />
des Original-Signals und des reflektierten<br />
Signals.<br />
Also: Signal unbrauchbar! von S gesendet<br />
Abhilfe: Die Leitung muss mit einem Widerstand<br />
abgeschlossen werden, der genau zu der<br />
Leitung passt und die ankommende Energie<br />
absorbiert:<br />
Wellenwiderstand<br />
(Der Wellenwiderstand hat nichts mit dem<br />
ohmschen Widerstand der Leitung zu tun!)<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
von E gelesen<br />
' '<br />
Z L C<br />
P=u• i P=u• i<br />
Z = 50 ... 120 <br />
17<br />
18
Asynchrone serielle Datenübertragung (UART)<br />
Basis für viele Feldbussysteme (z. B. auch Profibus),<br />
aber auch Punkt-zu-Punkt-Verbindungen (z. B. COM-Port am PC)<br />
verschiedene Bit-Definitionen gebräuchlich, z. B.:<br />
Standard RS232 (nur für Punkt-zu-Punkt-Verbindungen)<br />
Empfänger<br />
Sender<br />
Sender<br />
Empfänger<br />
U<br />
Standard RS485 (für Bussysteme)<br />
Sender<br />
Empfänger<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
U<br />
„0“: + 3 V < U < + 15 V<br />
„1“: - 15 V < U < - 3 V<br />
• elektrisch symmetrisch<br />
• Tristate<br />
• Bitdefinition durch U, I<br />
Asynchrone serielle Datenübertragung (UART) 1<br />
Asynchron: „Es gibt kein gemeinsames Taktsignal“. Übertragung byteorientiert<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
a) Start mit einer „0“-“1“-Flanke<br />
b) Datenbits (Start LSB)<br />
c) Prüfbit (Parity) ggf.<br />
d) Abschluss mit „0“<br />
19<br />
e) frühester Beginn des nächsten<br />
Startbits<br />
20
Asynchrone serielle Datenübertragung (UART) 2<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Zwischen Sender und Empfänger muss<br />
vereinbart sein:<br />
• Datenrate bit/s (entspricht Baudrate)<br />
• LSB zuerst<br />
• Anzahl Datenbits (meist 8)<br />
• Prüfbit: Gerade oder ungerade<br />
Parität (Gesamte Anzahl der „1“)<br />
• Anzahl Stoppbits (meist 1)<br />
Der Empfänger startet mit der erkannten „0“-“1“-Flanke einen Taktgeber mit<br />
der vereinbarten Bitrate.<br />
Bei erstmaligem Einschalten eines Gerätes oder nach Störungen könnte eine<br />
„0“-“1“-Flanke innerhalb der Daten fälschlicherweise als Start erkannt werden.<br />
Meisten passen dann aber Parity und Endebit nicht.<br />
Profibus 1<br />
Profibus:<br />
Feldbus, 1989 von einem Firmenkonsortium definiert,<br />
genormt in DIN 19245, IEC 61158 und IEC 61784.<br />
Zweidrahtleitung (+ Ausgleichsleitung), RS485<br />
Teilnehmer 1 Teilnehmer 2 Teilnehmer n<br />
Grundsatz: Es darf zu jeder Zeit nur ein Teilnehmer senden, alle dürfen hören.<br />
aktiver Teilnehmer: senden „ungefragt“<br />
passive Teilnehmer: senden nur „gefragt“<br />
Einfachster Fall: Es gibt einen Master am Bus, der der aktive Teilnehmer ist<br />
(Master/Slave-Verfahren).<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
21<br />
22
Profibus 2<br />
Zweidrahtleitung (+ Ausgleichsleitung), RS485<br />
Teilnehmer 1 Teilnehmer 2 Teilnehmer n<br />
Jeder Teilnehmer hat eine feste Adresse in seinem Speicher.<br />
Der Master sendet an einen Slave (z. B. einen Sensor), von dem er Daten<br />
abfragen möchte, eine Anforderung.<br />
Der Slave antwortet darauf mit den gewünschten Daten.<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Profibus: Beispiel für ein Telegramm<br />
SYN: mindestens 33 Bit Ruhe<br />
SD3: Startbyte 3, (3 = Formatnr. des nachfolgenden Teils)<br />
DA: Zieladresse (Destination)<br />
SA: Absenderadresse (Source)<br />
FC: Kontrollbyte<br />
DATA_UNIT: Datenfeld, feste Länge 8 Byte (L = 11 Byte)<br />
FCS: Prüfbyte (entsprechend Parity)<br />
ED: Endebyte<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
23<br />
24
Profibus: Zum Zeitverhalten<br />
Jeder Teilnehmer sieht sich die Adresse DA an. Nur der angesprochene<br />
Teilnehmer antwortet.<br />
Zeitverhalten:<br />
• Anfrage des Masters<br />
• Slave bereitet Antwort auf<br />
• Slave sendet Antwort<br />
• oder Abbruch wegen<br />
Zeitüberschreitung<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
einige Zuteilungsverfahren<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
bei n-Teilnehmern wird dies<br />
n-fach wiederholt.<br />
Somit ist die maximale Verzögerung<br />
z. B. für eine Alarmmeldung eines<br />
Slaves gegeben.<br />
Master/Slave: Ein fester Master koordiniert alles. Bei Ausfall des Masters ist<br />
keine Kommunikation mehr möglich. Sehr übersichtliches und robustes Verfahren.<br />
Token passing: Es wird eine „Spielmarke“ zwischen den Teilnehmern herumgereicht.<br />
Der Inhaber der Spielmarke ist der aktuelle Master. Es kann eine maximal<br />
zulässige Zeit festgelegt werden, für die ein Teilnehmer den Token halten darf.<br />
Bei Ausfall des aktuellen Masters: Generierung eines neuen Token.<br />
Collision detection: (z. B. Ethernet) Jeder darf senden, wenn er sieht, dass es keine<br />
Aktivität auf dem Bus gibt. Jeder liest seine gesendete Nachricht mit und erkennt,<br />
wenn bei gleichzeitigem Senden eine Verfälschung eingetreten ist. Dann<br />
Wiederholung nach einer Zeit, die. z. B. durch einen Zufallsgenerator bestimmt ist.<br />
Collision avoidance: (z. B. CAN) Im Unterschied zu Collision detection gibt es ein<br />
dominantes Zeichen, z. B. „0“. Ein paralleler Sendeversuch wird nur von<br />
demjenigen erkannt, der zuerst eine „1“ senden möchte, dieser verzichtet dann.<br />
Das (dominante) Telegramm bleibt unverfälscht.<br />
Zeitmultiplexverfahren: (z. B. TTP) Jeder Teilnehmer hat einen bestimmtes<br />
Zeitfenster; Uhren werden dazu genau synchonisiert.<br />
25<br />
26
Lichtwellenleiter: Arten<br />
übliche Werte:<br />
Kern: 50 m Durchmesser<br />
Mantel: 125 m Durchmesser<br />
Wellenlänge: 660, 850, 1300, 1550 nm (Infrarot)<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
Lichtwellenleiter: Bandbreite<br />
Problem bei Multimodefasern:<br />
Die einzelnen Wege sind unterschiedlich lang.<br />
Folge:<br />
Kurze Impulse fließen ineinander.<br />
gesendet<br />
nach etwas Länge<br />
nach großer Länge<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
übliche Werte:<br />
Kern: 9 m Durchm.<br />
Frequenz • Länge ist Kenngröße<br />
20 MHz km 1 GHz km >10 GHz km<br />
27<br />
28
Lichtwellenleiter: „Bussystem“<br />
Zur Übertragung von Daten wird je Richtung eine Faser eingesetzt.<br />
Eine physikalische Busstruktur gibt es nicht.<br />
Logisch wird ein Bus so realisiert, dass jeder Teilnehmer die empfangenen Signale<br />
mit seinem Sender weiterleitet.<br />
Vorlesung „Automation und Prozessrechentechnik“, Kapitel „Datenverbindungen“<br />
Prof. Dr.-Ing. G. Ackermann, <strong>TUHH</strong>, 2011<br />
29