10.1. Ebene Kurven
10.1. Ebene Kurven
10.1. Ebene Kurven

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>10.1.</strong> <strong>Ebene</strong> <strong>Kurven</strong><br />
Mathematische <strong>Kurven</strong> sind uns aus den verschiedensten Zusammenhängen vertraut. Wir stellen<br />
hier kurz die wichtigsten Begriffe zusammen.<br />
Parameterdarstellungen einer Kurve<br />
sind stetige Funktionen (sogenannte Wege) w von einem reellen Intervall I = [ a,<br />
b ] in einen<br />
zwei- oder dreidimensionalen Raum. Das Bild w[I] ist die von w erzeugte Kurve. Man<br />
interpretiert I meist als ein Zeitintervall, so daß w(t) den jeweiligen Punkt angibt, in dem man sich<br />
zur Zeit t befindet. Man beachte aber, daß man aus dem Bild der Kurve weder die<br />
Durchlaufgeschwindigkeit noch den Durchlaufsinn ablesen kann. Ersetzt man beispielsweise I<br />
durch [a/2,b/2] und w( t ) durch w( 2 t ), so wird die Kurve doppelt so schnell durchlaufen, hat aber<br />
natürlich das selbe Bild. Den umgekehrten Durchlauf erhält man durch die Parameterdarstellung<br />
u( t ) = w ( a + b − t)<br />
denn dann ist u( a ) = w( b ), u( b ) = w( a ), und mit wachsendem t fällt a + b − t entsprechend.<br />
Wir werden meist voraussetzen, daß w (zumindest stückweise) einmal oder sogar mehrfach stetig<br />
differenzierbar ist. Falls außerdem die Ableitung w´ ( t ) durchweg von 0 verschieden ist (die Kurve<br />
also keine stationären Punkte besitzt), spricht man von einer regulären Darstellung und einer<br />
glatten Kurve.<br />
Ableitungen nach einem Zeitparameter t bezeichnet man (insbesondere in technischen und<br />
physikalischen Zusammenhängen) häufig mit einem Punkt statt mit einem Strich (bei MAPLE geht<br />
das nicht), und die Wegfunktionen bzw. die entsprechenden Ortsvektoren mit x. Da die<br />
Buchstaben x,y,z aber fast immer für Koordinaten stehen, wählen wir einen neuen Buchstaben w,<br />
der auch auf die Interpretation als Weg hindeutet. Es ist also<br />
⎡x( t ) ⎤<br />
w( t)<br />
⎡x( t ) ⎤<br />
= ⎢ ⎥<br />
⎣y( t ) ⎦<br />
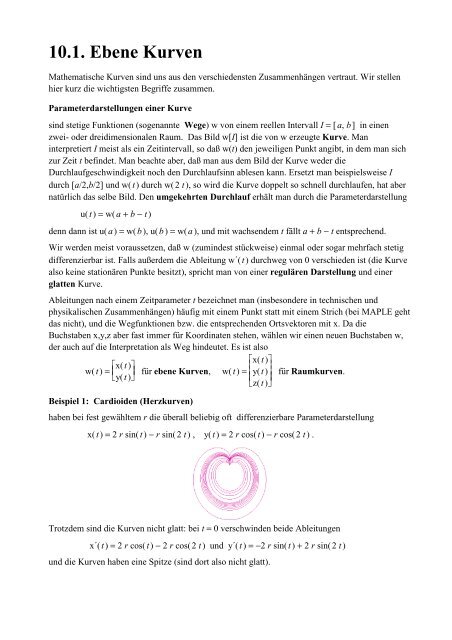
Beispiel 1: Cardioiden (Herzkurven)<br />
für ebene <strong>Kurven</strong>, w( t)<br />
=<br />
y( t )<br />
⎢ ⎥<br />
⎣z( t ) ⎦<br />
für Raumkurven.<br />
haben bei fest gewähltem r die überall beliebig oft differenzierbare Parameterdarstellung<br />
x( t ) = 2 r sin( t)<br />
− r sin( 2 t ) , y( t ) = 2 r cos( t ) − r cos( 2 t ) .<br />
Trotzdem sind die <strong>Kurven</strong> nicht glatt: bei t =<br />
0 verschwinden beide Ableitungen<br />
x´ ( t ) = 2 r cos( t)<br />
− 2 r cos( 2 t ) und y´ ( t ) = − 2 r sin( t ) + 2 r sin( 2 t )<br />
und die <strong>Kurven</strong> haben eine Spitze (sind dort also nicht glatt).
Tangenten und Geschwindigkeit<br />
Die (komponentenweise gebildete) Ableitung w´ ( t ) beschreibt geometrisch einen<br />
Tangentenvekor. Im Falle w´ ( t 0<br />
) ≠ 0 ist<br />
w( t 0<br />
) + t w´ ( t 0<br />
) x´ ( t ) = 2 r cos( t)<br />
− 2 r cos( 2 t )<br />
eine Parameterdarstellung der Tangente zu einem festen Zeitpunkt t 0<br />
. Faßt man w( t ) als<br />
dynamischen Durchlauf der Kurve auf, so ist w´ ( t ) der jeweilige Geschwindigkeitsvektor, und<br />
sein Betrag<br />
v( t ) = w´ ( t )<br />
ist die (skalare) Bahngeschwindigkeit.<br />
Wir betrachten zunächst solche <strong>Kurven</strong>, die in der x-y-<strong>Ebene</strong> liegen, bei denen also die dritte<br />
Koordinatenfunktion verschwindet. Im Prinzip läßt sich jede in einer <strong>Ebene</strong> gelegene Raumkurve<br />
durch eine geeignete Raumdrehung in diese Situation "transformieren". Die mathematische<br />
Beschreibung von Raumdrehungen kann allerdings recht kompliziert werden (lineare Algebra).<br />
Polarkoordinaten<br />
Wir bezeichnen wie üblich mit<br />
r den Radius, d.h. den Abstand eines Punktes vom Ursprung<br />
φ den Drehwinkel des Ortsvektors zur x-Achse.<br />
Darstellungen ebener <strong>Kurven</strong><br />
Implizite Darstellung kartesisch polar<br />
Lösungsmenge einer Gleichung Lösungsmenge einer Gleichung<br />
G ( x,<br />
y ) = 0 H ( r,<br />
φ)<br />
= 0<br />
Explizite Darstellung kartesisch polar<br />
y-Koordinate als Funktion Radius als Funktion<br />
der x-Koordinate: y = f( x ) vom Drehwinkel r = ρ( φ )<br />
Parameterdarstellung kartesisch polar<br />
Beide Koordinaten als<br />
Radius und Drehwinkel als<br />
Funktionen eines Parameters Funktionen eines Parameters<br />
x = x( t ),<br />
y = y( t )<br />
r = r( t ),<br />
φ = φ( t )<br />
Die expliziten Darstellungen können sowohl als Spezialfall der impliziten als auch der allgemeinen<br />
Parameterdarstellungen aufgefaßt werden:
y = f( x ) ist gleichbedeutend mit G ( x,<br />
y ) = 0 , wenn man G ( x,<br />
y ) = y − f( x ) setzt,<br />
aber auch mit x = x( t ) und y = y( t ) , wenn man x( t ) = t und y( t ) = f( t ) setzt.<br />
Analoges gilt für die Polarkoordinaten. Die Umrechnung zwischen kartesischen und polaren<br />
Darstellungen geschieht wie immer über die Formeln<br />
x = r cos( t ) , y = r sin( t ) ,<br />
r = x 2 + y 2 ⎛ ⎞<br />
, t = arctan⎜<br />
y ⎟ +<br />
⎝ x ⎠<br />
Beispiel 2: Berührkreise<br />
k π bzw. t = signum( y)<br />
⎛ ⎞<br />
arccos⎜<br />
x ⎟<br />
⎝ r ⎠<br />
.<br />
Wir wollen zwei gleich große Kreise mit Mittelpunkten auf der x-Achse betrachten, die sich<br />
gegenseitig und den Einheitskreis berühren.<br />
Implizite Darstellung kartesisch polar<br />
Einheitskreis: x 2 + y 2 = 1 r − 1 = 0<br />
⎛ 1 ⎞<br />
Linker Kreis: ⎜ x + ⎟ + y 2 1<br />
=<br />
⎝ 2 ⎠ 4<br />
⎛ 1 ⎞<br />
Rechter Kreis: ⎜x<br />
− ⎟ + y 2 1<br />
=<br />
⎝ 2 ⎠ 4<br />
2<br />
2<br />
r + cos( φ)<br />
= 0<br />
r − cos( φ)<br />
= 0<br />
Explizite Darstellung kartesisch polar<br />
Einheitskreis: y = 1 − x 2 , y = − 1 − x 2 r = 1<br />
Linker Kreis: y = x + x 2 , y = − x + x 2 r = − cos( φ )<br />
Rechter Kreis: y = x − x 2 , y = − x − x 2 r = cos( φ)<br />
Parameterdarstellung kartesisch polar<br />
Einheitskreis: x = cos( t ) , y = sin( t ) r = 1 , φ = t<br />
Linker Kreis: x =<br />
Rechter Kreis: x =<br />
− 1 − cos( t )<br />
2<br />
1 + cos( t)<br />
2<br />
, y =<br />
, y =<br />
− sin( t )<br />
2<br />
sin( t)<br />
2<br />
⎛ ⎞<br />
r = −cos⎜<br />
t ⎟<br />
⎝ 2 ⎠<br />
, φ = t<br />
2<br />
⎛ ⎞<br />
r = cos⎜<br />
t ⎟<br />
⎝ 2 ⎠<br />
, φ = t<br />
2
Die überraschend einfachen Polardarstellungen macht man sich am besten geometrisch klar:<br />
In dieser Zeichnung ist der Radius r die Höhe in einem gleichschenkligen Dreieck, dessen<br />
Öffnungswinkel t ist. Der Winkel φ zwischen dem Radius und der x-Achse ist daher gleich t 2 .<br />
Es gilt also tatsächlich für den rechten Kreis (mit Durchmesser 1)<br />
r = cos( φ ) =<br />
x = r ( )<br />
⎛ ⎞<br />
cos⎜<br />
t ⎟<br />
⎝ 2 ⎠<br />
,<br />
⎛ ⎞<br />
cos φ = cos⎜<br />
t ⎟ =<br />
⎝ 2 ⎠<br />
2<br />
1 + cos( t)<br />
2<br />
⎛ ⎞<br />
, y = sin( φ ) = sin⎜<br />
t ⎛ ⎞<br />
⎟ cos⎜<br />
t ⎟ =<br />
⎝ 2 ⎠ ⎝ 2 ⎠<br />
sin( t)<br />
Aus dieser Gleichung kann man umgekehrt sofort die explizite kartesische Darstellung gewinnen:<br />
y = r sin( φ ) = cos( φ ) sin( φ ) = r 1 − r 2 = x 1 − x = x − x 2 .<br />
Beispiel 3: Deformierte Einheitskreise<br />
Für beliebiges, aber fest gewähltes p > 0 nennen wir die implizit durch<br />
x p + y p = 1<br />
beschriebene Kurve einen deformierten Einheitskreis.<br />
Nur für p = 2 ergibt sich wirklich ein Kreis im üblichen geometrischen Sinn. Die deformierten<br />
Einheitskreise haben aber viele Eigenschaften gemein: sie sind symmetrisch sowohl zur x- als auch<br />
zur y-Achse und berühren stets das Quadrat mit der Gleichung<br />
max ( x , y ) = 1<br />
von innen. Läuft p gegen ∞ , so nähern sie sich mehr und mehr diesem Quadrat. Die umschlossene<br />
Fläche ist für 1 ≤ p konvex (im Fall p = 1 eine quadratische Raute), während für p < 1 eine<br />
Astroide herauskommt.<br />
2<br />
.<br />
Explizit werden deformierte Einheitskreise durch die Funktionen
⎛<br />
⎜<br />
y = ( 1 − x p ⎝<br />
)<br />
1 ⎞<br />
⎟<br />
p ⎠<br />
(jeweils ein positiver und ein negativer Ast)<br />
beschrieben. Eine bequeme Parameterdarstellung, die sich auch zur graphischen Darstellung gut<br />
eignet, ist<br />
x = cos( t)<br />
q , y = sin( t )<br />
q 2<br />
mit q =<br />
p .<br />
Diese Parameterdarstellung führt unmittelbar zu<br />
r = x 2 + y 2 = cos( t )<br />
( 2 q )<br />
+ sin( t )<br />
( )<br />
2 q ,<br />
aber das ist (außer im Spezialfall p = 2, d.h. q = 1) nicht die Polardarstellung, d.h. t ist im<br />
allgemeinen nicht der Winkel zur x-Achse. Die obige Darstellung für r läßt sich aber mit Hilfe der<br />
Gleichungen<br />
cos( t)<br />
2 1<br />
y<br />
=<br />
und tan( φ)<br />
=<br />
1 + tan( t)<br />
2 x = tan( t)<br />
q<br />
umformen zu<br />
r =<br />
1<br />
cos( φ)<br />
⎛<br />
⎜<br />
( 1 + tan( φ)<br />
p ⎝<br />
)<br />
⎞<br />
− 1 ⎟<br />
p ⎠<br />
und dies ist jetzt wirklich die Polardarstellung!<br />
3 2<br />
p = , p =<br />
2 3<br />
Von speziellem Interesse ist der Fall p =<br />
x p + y p = 1<br />
die Parameterdarstellung<br />
Also ist<br />
x = cos( t)<br />
3 , y = sin( t )<br />
3 .<br />
r = cos( t )<br />
6 + sin( t)<br />
6 ,<br />
2<br />
3<br />
. Hier hat die Astroide<br />
während die Polardarstellung hier keine Vorteile bringt. Wir zeichnen die Astroide und die Kurve<br />
mit der Polardarstellung<br />
r = cos( φ)<br />
6 + sin( φ)<br />
6<br />
(die keine Astroide liefert).
Tangenten und Normalen<br />
Zur Parameterdarstellung<br />
w( t)<br />
⎡x( t ) ⎤<br />
= ⎢ ⎥<br />
⎣y( t ) ⎦<br />
gehört der Geschwindigkeitsvektor oder Tangentialvektor<br />
w´ ( t)<br />
⎡x´ ( t)<br />
⎤<br />
= ⎢ ⎥<br />
⎣y´ ( t ) ⎦<br />
die skalare Geschwindigkeit<br />
v( t ) = w´ ( t ) = x´ ( t)<br />
2 + y´ ( t)<br />
2<br />
und der Normalenvektor<br />
w´n ( t)<br />
⎡− y´ ( t)<br />
⎤<br />
= ⎢ ⎥ .<br />
⎣ x´ ( t)<br />
⎦<br />
Er hat die gleiche Länge wie der Tangentialvektor. Im Falle<br />
n( t)<br />
=<br />
w´n ( t)<br />
v( t)<br />
und − n( t )<br />
die beiden Normalen-Einheitsvektoren auf der Kurve.<br />
v( t)<br />
≠ 0 sind<br />
Mit t als neuem Parameter haben wir also zu jedem festen "Zeitpunkt" t 0<br />
die Tangente<br />
T ,<br />
und die Normale<br />
w t0<br />
( t ) = w( t 0<br />
) + t w´ ( t 0<br />
)<br />
N ,<br />
w t0<br />
( t ) = w( t 0<br />
) + t n( t 0<br />
) .<br />
Wir berechnen und zeichnen Tangenten und Normalen zu den deformierten Einheitskreisen<br />
w( t)<br />
⎡x( t ) ⎤<br />
= ⎢ ⎥<br />
⎣y( t ) ⎦<br />
mit x( t ) = cos( t)<br />
q , y( t ) = ( )<br />
sin t q und q =<br />
2<br />
p .<br />
Einfache Ableitung ergibt<br />
⎡<br />
w´ ( t)<br />
=<br />
⎢−q cos( t )<br />
( q − 1 )<br />
sin( t)<br />
⎤<br />
⎥<br />
⎢<br />
⎥<br />
,<br />
⎣ q sin( t )<br />
( q − 1 )<br />
cos( t ) ⎦<br />
w´n ( t )<br />
⎡<br />
=<br />
⎢−q sin( t )<br />
( q − 1 )<br />
cos( t )<br />
⎤<br />
⎥<br />
⎢<br />
⎥<br />
⎣−q cos( t )<br />
( q − 1 ) .<br />
sin( t ) ⎦
2<br />
p = 3 , q =<br />
3<br />
2<br />
p = , q = 3<br />
3<br />
2<br />
p = , p = 3<br />
3
Beispiel 4: Zykloiden<br />
Besonders schön lassen sich <strong>Kurven</strong>verlauf, Tangenten und Normalen bei Zykloiden verfolgen.<br />
Das sind <strong>Kurven</strong>, die ein mit einem Rad verbundener Punkt beschreibt, wenn dieses auf einer<br />
vorgegebenen Bahnkurve entlang rollt. Wir lassen die Räder zunächst auf einer ebenen Bahn (etwa<br />
der x-Achse) abrollen. Nehmen wir den Rollwinkel t als Parameter, so hat der Mittelpunkt des<br />
Rades (mit Radius r) die Koordinaten r t und r. Ein mit dem Rad fest verbundener Punkt<br />
(Seitenstrahler) im Abstand a vom Mittelpunkt hat daher die kartesische Parameterdarstellung<br />
x( t ) = r t − a sin( t ) , y( t ) = r − a cos( t ) .<br />
Die Ableitungen lauten<br />
x´ ( t ) = r − a cos( t ) , y´ ( t ) = a sin( t ) ,<br />
und daraus resultiert (bei konstanter Winkelgeschwindigkeit 1) die skalare Geschwindigkeit<br />
v( t ) = r 2 + a 2 − 2 r a cos( t ).<br />
Durch Veränderung des Maßstabes kann man r =<br />
1 annehmen.<br />
Mathe und Inge auf der Tour (völlig ungedopt)<br />
Bei Variation der Geschwindigkeit gibt es Stehversuche und Überholmanöver.
Beispiel 5: Epi- und Hypozykloiden<br />
Rollt ein Kreis k mit Radius r auf einem anderen Kreis K mit Radius R ab, so bewegt sich ein<br />
Punkt, der mit dem abrollenden Kreis k im Abstand a von dessen Mittelpunkt fest verbunden ist,<br />
auf einer Epizykloide (falls der Kreis außen abrollt) bzw. auf einer Hypozykloide (falls er innen<br />
abrollt). Parameterdarstellungen dieser Zykloiden sind gegeben durch<br />
Dabei ist<br />
w( t)<br />
⎡ω r cos( t)<br />
− σ a cos( ω t ) ⎤<br />
= ⎢<br />
⎥ .<br />
⎣ ω r sin( t ) − a sin( ω t)<br />
⎦<br />
t der Drehwinkel des Berührpunktes der Kreise,<br />
σ = 1 das Signum für "außen" und σ = −1 das Signum für "innen",<br />
R + σ r R<br />
ω = = + σ das Verhältnis zwischen Mittelpunktabstand und Radius r.<br />
r r<br />
Der jeweilige Geschwindigkeitsvektor entlang der Zykloide ist<br />
w´ ( t)<br />
⎡ω ( − r sin( t ) + σ a sin( ω t ))<br />
⎤<br />
= ⎢<br />
⎥<br />
⎣ ω ( r cos( t ) − a cos( ω t)<br />
) ⎦<br />
und einer der beiden darauf senkrecht stehenden Normalenvektoren gleicher Länge ist<br />
w´n ( t)<br />
⎡ ω ( − r cos( t)<br />
+ a cos( ω t ))<br />
⎤<br />
= ⎢<br />
⎥ .<br />
⎣ω ( − r sin( t ) + σ a sin( ω t)<br />
) ⎦<br />
Die Verbindungsstrecke zwischen Berührpunkt und <strong>Kurven</strong>punkt steht also stets senkrecht auf der<br />
Kurve, und ihre Länge ist proportional zur skalaren Geschwindigkeit v( t ) = w´ ( t ) . Diese ist<br />
gleich<br />
( − ω r sin( t)<br />
+ a sin( ω t)<br />
ω σ )<br />
2 + ( ω r cos( t)<br />
− a cos( ω t)<br />
ω)<br />
2 ,<br />
was sich mittels der trigonometrischen Umformung<br />
⎛ ⎞<br />
cos( t ) cos( ω t ) + σ sin( t ) sin( ω t ) = cos ( ω t − σ t ) = cos⎜<br />
R t<br />
⎟<br />
⎝ r ⎠<br />
vereinfacht zu<br />
v( t)<br />
= ω r 2 + a 2 ⎛ ⎞<br />
− 2 r a cos⎜<br />
R t<br />
⎟ .<br />
⎝ r ⎠
Die Astroide<br />
w( t)<br />
⎡cos( t )<br />
3 ⎤<br />
= ⎢ ⎥<br />
⎣sin( t)<br />
3 ⎦<br />
entsteht als Rollkurve durch Abrollen eines Rades vom Radius 1 4<br />
im Inneren des Einheitskreises<br />
x 2 + y 2 = 1. In der Tat ist<br />
d.h.<br />
bzw.<br />
cos( 3 t)<br />
+ i sin( 3 t ) = e ( 3 i t )<br />
= ( cos( t ) + i sin( t ) )<br />
3 =<br />
cos( t)<br />
3 − 3 cos( t ) sin( t)<br />
2 + 3 i cos( t)<br />
2 sin( t ) − i sin( t )<br />
3 ,<br />
cos( 3 t ) = 4 cos( t )<br />
3 − 3 cos( t ) und sin( 3 t ) = 3 sin( t ) − 4 sin( t )<br />
3 ,<br />
cos( t)<br />
3 3 cos( t )<br />
= +<br />
4<br />
cos( 3 t)<br />
4<br />
und sin( t )<br />
3 =<br />
3 sin( t)<br />
4<br />
−<br />
sin( 3 t)<br />
4<br />
.<br />
Zum Schluß eine Schar von Astroiden in einem Zahnradgetriebe:<br />
Clockwork Orange