III. Humanoide Roboter - IMA,ZLW & IfU - RWTH Aachen University
III. Humanoide Roboter - IMA,ZLW & IfU - RWTH Aachen University
III. Humanoide Roboter - IMA,ZLW & IfU - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
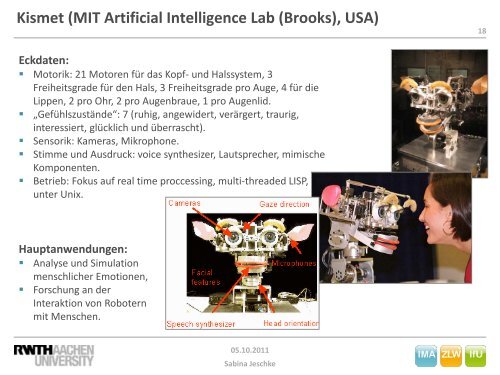
Kismet (MIT Artificial Intelligence Lab (Brooks), USA)<br />
18<br />
Eckdaten:<br />
• Motorik: 21 Motoren für das Kopf- und Halssystem, 3<br />
Freiheitsgrade für den Hals, 3 Freiheitsgrade pro Auge, 4 für die<br />
Lippen, 2 pro Ohr, 2 pro Augenbraue, 1 pro Augenlid.<br />
• „Gefühlszustände“: 7 (ruhig, angewidert, verärgert, traurig,<br />
interessiert, glücklich und überrascht).<br />
• Sensorik: Kameras, Mikrophone.<br />
• Stimme und Ausdruck: voice synthesizer, Lautsprecher, mimische<br />
Komponenten.<br />
• Betrieb: Fokus auf real time proccessing, multi-threaded LISP,<br />
unter Unix.<br />
Hauptanwendungen:<br />
• Analyse und Simulation<br />
menschlicher Emotionen,<br />
• Forschung an der<br />
Interaktion von <strong>Roboter</strong>n<br />
mit Menschen.<br />
05.10.2011<br />
Sabina Jeschke