

Angewandte Regelung und Optimierung in der ... - uni-stuttgart
Angewandte Regelung und Optimierung in der ... - uni-stuttgart
Angewandte Regelung und Optimierung in der ... - uni-stuttgart

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
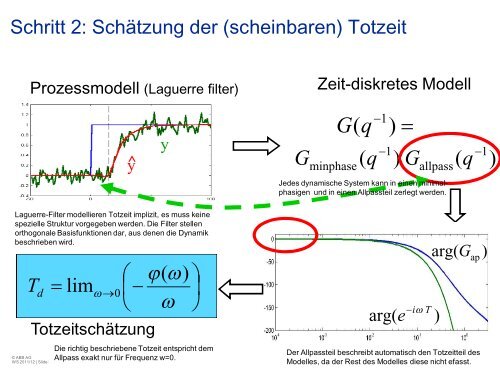
Schritt 2: Schätzung <strong>der</strong> (sche<strong>in</strong>baren) Totzeit<br />
Prozessmodell (Laguerre filter)<br />
Zeit-diskretes Modell<br />
^y<br />
y<br />
G<br />
G(<br />
q<br />
m<strong>in</strong>phase<br />
( q<br />
1<br />
)<br />
1<br />
)<br />
<br />
G<br />
allpass<br />
Jedes dynamische System kann <strong>in</strong> e<strong>in</strong>en m<strong>in</strong>imalphasigen<br />
<strong>und</strong> <strong>in</strong> e<strong>in</strong>en Allpassteil zerlegt werden.<br />
( q<br />
1<br />
)<br />
Laguerre-Filter modellieren Totzeit implizit, es muss ke<strong>in</strong>e<br />
spezielle Struktur vorgegeben werden. Die Filter stellen<br />
orthogonale Basisfunktionen dar, aus denen die Dynamik<br />
beschrieben wird.<br />
T d<br />
<br />
(<br />
)<br />
lim<br />
0 <br />
<br />
Totzeitschätzung<br />
© ABB AG<br />
WS 2011/12 | Slide 38<br />
<br />
<br />
<br />
Die richtig beschriebene Totzeit entspricht dem<br />
Allpass exakt nur für Frequenz w=0.<br />
arg(<br />
arg( Gap)<br />
<br />
i T<br />
e <br />
Der Allpassteil beschreibt automatisch den Totzeitteil des<br />
Modelles, da <strong>der</strong> Rest des Modelles diese nicht efasst.<br />
)












