

Der direkte Weg zur sicheren Automation - DINA Elektronik Gmbh
Der direkte Weg zur sicheren Automation - DINA Elektronik Gmbh
Der direkte Weg zur sicheren Automation - DINA Elektronik Gmbh

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Originalbetriebsanleitung<br />
Funktion der Stillstands-, Drehzahl- und Richtungsüberwachung<br />
Die Erfassung der Bewegung eines Antriebs erfolgt über das Messsystem des Antriebs.<br />
Richtungsüberwachung<br />
<strong>Der</strong> virtuelle Kontakt LR1, LR2 für Richtungsüberwachung ist bei Links-Rechts-Lauf<br />
geschlossen und bei Rechts-Links-Lauf offen.<br />
Stillstandsüberwachung<br />
Für die jeweilige Überwachung wird die entsprechende Encoder Frequenz in das Feld SS1 für die<br />
1. und in SS2 für die 2. Überwachung in der Parametriermaske eingetragen.<br />
<strong>Der</strong> virtuelle Kontakt SS1 bzw. SS2 ist geschlossen bei<br />
Vist < parametrierter Wert und offen bei Vist > parametrierter Wert im Feld SS1, SS2<br />
Die im Feld SS1 und SS2 angegebenen Frequenzen stehen für einen Stillstandswert.<br />
Drehzahlüberwachung (Betriebsarten)<br />
Mit DNSL-DS können verschiedene Betriebsarten einer Maschine überwacht werden.<br />
Für die jeweilige Betriebsartgeschwindigkeit wird die entsprechende Encoder Frequenz in das<br />
betreffende Feld in der Parametriermaske eingetragen. Siehe Tabelle.<br />
Die Betriebsarten können wie folgt angewählt werden:<br />
Frequenzfeld Betriebsart Virtuelle Eingänge<br />
DZ1 DZ2<br />
DZ1 DZ2<br />
F11 F21 Einrichtbetrieb (BA2) F11 F21<br />
F12 F22 Halbautomatikbetrieb (BA3) F12 F22<br />
F13 F23 Automatikbetrieb (BA1) F13 F23<br />
Nicht überwachte BA1 MT1 MT2<br />
<strong>Der</strong> virtuelle Kontakt DZ1 für Überwachung 1 und DZ2 für Überwachung 2 ist geschlossen bei<br />
Vist < parametrierter Wert und offen bei Vist > parametrierter Wert<br />
Dies gilt auch für Geschwindigkeiten, die über die DNCO-Funktion gewählt wurden.<br />
Prioritäten:<br />
MT1, MT2 > F13, F23 > F12, F22 > F11, F21 > Stillstand<br />
Bei nicht aktiven Eingängen (F11, F12, F13 und MT1 bzw. F21, F22, F23 und MT2 haben Null-<br />
Signal) verhalten sich die Kontakte DZ1 bzw. DZ2 wie SS1 bzw. SS2. In diesem Falle öffnen DZ1<br />
bzw. DZ2 bei Überschreitung der parametrierten Frequenz im Feld SS1 bzw. SS2.<br />
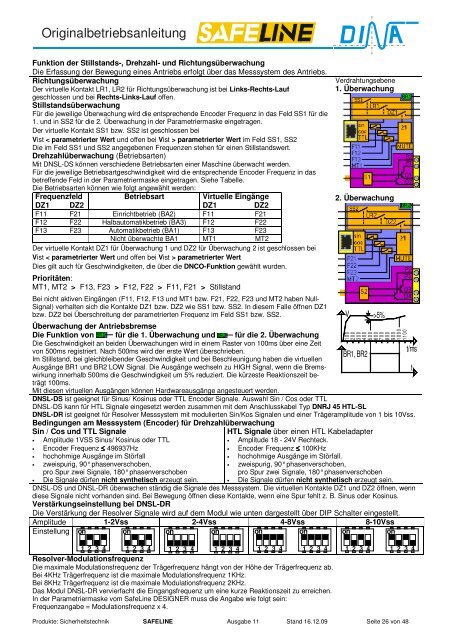
Überwachung der Antriebsbremse<br />
Die Funktion von für die 1. Überwachung und für die 2. Überwachung<br />
Die Geschwindigkeit an beiden Überwachungen wird in einem Raster von 100ms über eine Zeit<br />
von 500ms registriert. Nach 500ms wird der erste Wert überschrieben.<br />
Im Stillstand, bei gleichbleibender Geschwindigkeit und bei Beschleunigung haben die virtuellen<br />
Ausgänge BR1 und BR2 LOW Signal. Die Ausgänge wechseln zu HIGH Signal, wenn die Bremswirkung<br />
innerhalb 500ms die Geschwindigkeit um 5% reduziert. Die kürzeste Reaktionszeit beträgt<br />
100ms.<br />
Mit diesen virtuellen Ausgängen können Hardwareausgänge angesteuert werden.<br />
Verdrahtungsebene<br />
1. Überwachung<br />
2. Überwachung<br />
BR1, BR2<br />
Produkte: Sicherheitstechnik SAFELINE Ausgabe 11 Stand 16.12.09 Seite 26 von 48<br />
V<br />
>5%<br />
1 0 0<br />
2 0 0<br />
3 0 0<br />
4 0 0<br />
5 0 0<br />
6 0 0<br />
7 0 0<br />
8 0 0<br />
9 0 0<br />
1 0 0 0<br />
11 0 0<br />
DNSL-DS ist geeignet für Sinus/ Kosinus oder TTL Encoder Signale. Auswahl Sin / Cos oder TTL<br />
DNSL-DS kann für HTL Signale eingesetzt werden zusammen mit dem Anschlusskabel Typ DNRJ 45 HTL-SL<br />
DNSL-DR ist geeignet für Resolver Messsystem mit modulierten Sin/Kos Signalen und einer Trägeramplitude von 1 bis 10Vss.<br />
Bedingungen am Messsystem (Encoder) für Drehzahlüberwachung<br />
Sin / Cos und TTL Signale<br />
• Amplitude 1VSS Sinus/ Kosinus oder TTL<br />
• Encoder Frequenz ≤ 496937Hz<br />
• hochohmige Ausgänge im Störfall<br />
• zweispurig, 90° phasenverschoben,<br />
pro Spur zwei Signale, 180° phasenverschoben<br />
• Die Signale dürfen nicht synthetisch erzeugt sein.<br />
HTL Signale über einen HTL Kabeladapter<br />
• Amplitude 18 - 24V Rechteck.<br />
• Encoder Frequenz ≤ 100KHz<br />
• hochohmige Ausgänge im Störfall.<br />
• zweispurig, 90° phasenverschoben,<br />
pro Spur zwei Signale, 180° phasenverschoben<br />
• Die Signale dürfen nicht synthetisch erzeugt sein.<br />
DNSL-DS und DNSL-DR überwachen ständig die Signale des Messsystem. Die virtuellen Kontakte DZ1 und DZ2 öffnen, wenn<br />
diese Signale nicht vorhanden sind. Bei Bewegung öffnen diese Kontakte, wenn eine Spur fehlt z. B. Sinus oder Kosinus.<br />
Verstärkungseinstellung bei DNSL-DR<br />
Die Verstärkung der Resolver Signale wird auf dem Modul wie unten dargestellt über DIP Schalter eingestellt.<br />
Amplitude 1-2Vss 2-4Vss 4-8Vss 8-10Vss<br />
Einstellung on on on on on on on on<br />
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4<br />
Resolver-Modulationsfrequenz<br />
Die maximale Modulationsfrequenz der Trägerfrequenz hängt von der Höhe der Trägerfrequenz ab.<br />
Bei 4KHz Trägerfrequenz ist die maximale Modulationsfrequenz 1KHz.<br />
Bei 8KHz Trägerfrequenz ist die maximale Modulationsfrequenz 2KHz.<br />
Das Modul DNSL-DR vervierfacht die Eingangsfrequenz um eine kurze Reaktionszeit zu erreichen.<br />
In der Parametriermaske vom SafeLine DESIGNER muss die Angabe wie folgt sein:<br />
Frequenzangabe = Modulationsfrequenz x 4.<br />
1 2 3 4<br />
t/ms<br />
t<br />
1 2 3 4










