Diplomarbeit - Fingers elektrische Welt
Diplomarbeit - Fingers elektrische Welt
Diplomarbeit - Fingers elektrische Welt
WENIGER ANZEIGEN

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
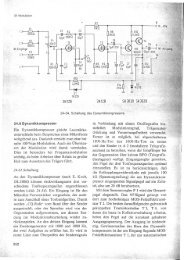
Die Wechselstromventile wurden mit einer Gleichrichterschaltung und einem<br />
Thyristiormodell realisiert.<br />
Schaltbild 4. Unterschaltung Stromventil<br />
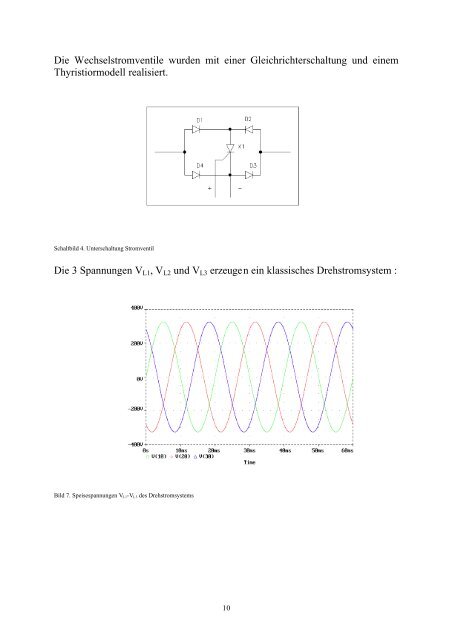
Die 3 Spannungen VL1, VL2 und VL3 erzeugen ein klassisches Drehstromsystem :<br />
Bild 7. Speisespannungen VL1-VL3 des Drehstromsystems<br />
10