Grundlagen der Radartechnik zur Füllstandmessung
Grundlagen der Radartechnik zur Füllstandmessung
Grundlagen der Radartechnik zur Füllstandmessung

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3. Radar-Füllstandsmesssysteme<br />
3<br />
3.6 FMCW-Radar<br />
3.6.1 Prinzip<br />
Beim FMCW-Radar wird ein linear frequenzmoduliertes Hochfrequenz-Signal verwendet; die<br />
Sendefrequenz steigt z.B. in einem Zeitintervall linear an (Frequenz-Sweep).<br />
Sen<strong>der</strong><br />
Mischer<br />
Differenzfrequenz f<br />
Antenne<br />
Verzögerungszeit<br />
t = 2a/c<br />
Frequenz<br />
f<br />
a<br />
Sen<strong>der</strong><br />
Reflektor<br />
Empfänger<br />
Zeit<br />
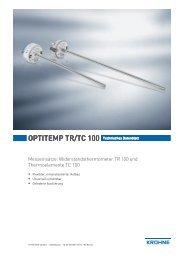
Bild 7<br />
Funktionsprinzip und<br />
Signalverlauf beim<br />
FMCW-Radar<br />
Durch die Verzögerungszeit während <strong>der</strong> Signalausbreitung än<strong>der</strong>t sich zwischenzeitlich<br />
die Sendefrequenz, so dass man aus <strong>der</strong> Differenz <strong>der</strong> momentanen Sendefrequenz und<br />
<strong>der</strong> Empfangsfrequenz ein nie<strong>der</strong>frequentes Signal (typisch bis einige kHz) erhält. Dessen<br />
Frequenz f ist proportional zum Reflektorabstand a; bei diesem Verfahren wird also die<br />
Verzögerungszeit t in eine Frequenz umgewandelt (df/dt ist die Sweepgeschwindigkeit):<br />
f = df/dt · t<br />
Technisch wird die Differenzfrequenz durch Mischung gebildet. Ist <strong>der</strong> Frequenz-Sweep linear,<br />
bleibt die Frequenz des Nie<strong>der</strong>frequenz-Mischsignal während des Sweepvorgangs konstant.<br />
Durch die niedrigen resultierenden Signalfrequenzen 8 ist die weitere Signalverarbeitung<br />
technisch einfach und sehr genau möglich. Gewöhnlich geschieht die Auswertung mittels<br />
digitaler Signalverarbeitung.<br />
3.6.2 Ausführung<br />
Bild 8 zeigt ein Ausführungs-Beispiel für ein FMCW-Radar-System 9 .Ein variabler Oszillator<br />
VCO wird von einem Mikroprozessor gesteuert, so dass <strong>der</strong> gewünschte Frequenz-Sweep<br />
entsteht. Dieses Signal wird verstärkt und über einen Stiftkoppler in die Sendeantenne eingespeist.<br />
Um eine gute Linearität des Sweeps zu gewährleisten, muss die augenblickliche Frequenz<br />
gemessen werden. Dieses geschieht durch Frequenzzählung nach Heruntermischen mit<br />
einer bekannten Frequenz (DRO).<br />
Das empfangene Signal wird über einen Richtkoppler ausgekoppelt, mit dem Sendesignal<br />
zusammengemischt und vom Mikroprozessor weiterverarbeitet.<br />
8<br />
im Gegensatz zum Puls-Radar-Verfahren<br />
9<br />
Die einzelnen elektronischen Komponenten werden in Kapitel 4 näher erläutert.<br />
Radarhandbuch 13