
Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
[FAIL SAFE]<br />
<strong>Funktions</strong>-<strong>Rotation</strong><br />
Fail Safe<br />
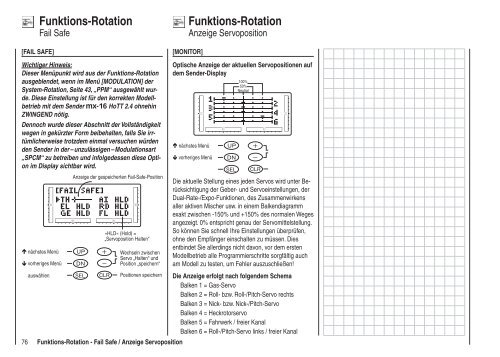
Wichtiger Hinweis:<br />
Dieser Menüpunkt wird aus der <strong>Funktions</strong>-<strong>Rotation</strong><br />
ausgeblendet, wenn im Menü [MODULATION] der<br />
System-<strong>Rotation</strong>, Seite 43, „PPM“ ausgewählt wurde.<br />
Diese Einstellung ist für den korrekten Modellbetrieb<br />
mit dem Sender mx-16 HoTT 2.4 ohnehin<br />
ZWINGEND nötig.<br />
Dennoch wurde dieser Abschnitt der Vollständigkeit<br />
wegen in gekürzter Form beibehalten, falls Sie irrtümlicherweise<br />
trotzdem einmal versuchen würden<br />
den Sender in der – unzulässigen – Modulationsart<br />
„SPCM“ zu betreiben und infolgedessen diese Option<br />
im Display sichtbar wird.<br />
� nächstes Menü<br />
� vorheriges Menü<br />
auswählen<br />
Anzeige der gespeicherten Fail-Safe-Position<br />
»HLD« (Hold) =<br />
„Servoposition Halten“<br />
Wechseln zwischen<br />
Servo „Halten“ und<br />
Position „speichern“<br />
Positionen speichern<br />
76 <strong>Funktions</strong>-<strong>Rotation</strong> - Fail Safe / Anzeige Servoposition<br />
<strong>Funktions</strong>-<strong>Rotation</strong><br />
Anzeige Servoposition<br />
[MONITOR]<br />
Optische Anzeige der aktuellen Servopositionen auf<br />
dem Sender-Display<br />
� nächstes Menü<br />
� vorheriges Menü<br />
100%<br />
50%<br />
Neutral<br />
Die aktuelle Stellung eines jeden Servos wird unter Berücksichtigung<br />
der Geber- und Servoeinstellungen, der<br />
Dual-Rate-/Expo-Funktionen, des Zusammenwirkens<br />
aller aktiven Mischer usw. in einem Balkendiagramm<br />
exakt zwischen -150% und +150% des normalen Weges<br />
angezeigt. 0% entspricht genau der Servomittelstellung.<br />
So können Sie schnell Ihre Einstellungen überprüfen,<br />
ohne den Empfänger einschalten zu müssen. Dies<br />
entbindet Sie allerdings nicht davon, vor dem ersten<br />
Modellbetrieb alle Programmierschritte sorgfältig auch<br />
am Modell zu testen, um Fehler auszuschließen!<br />
Die Anzeige erfolgt nach folgendem Schema<br />
Balken 1 = Gas-Servo<br />
Balken 2 = Roll- bzw. Roll-/Pitch-Servo rechts<br />
Balken 3 = Nick- bzw. Nick-/Pitch-Servo<br />
Balken 4 = Heckrotorservo<br />
Balken 5 = Fahrwerk / freier Kanal<br />
Balken 6 = Roll-/Pitch-Servo links / freier Kanal