KraftgröÃenverfahren
KraftgröÃenverfahren
KraftgröÃenverfahren

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
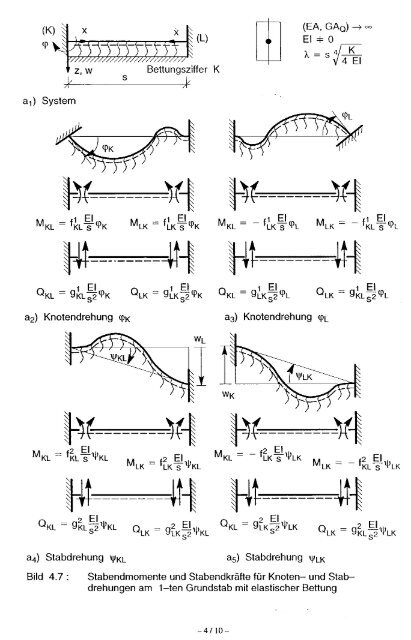
Stabendmomente nach Theorie I. Ordnung für das Drehwinkelverfahren<br />
Grundstab 1<br />
Belastung+Biegelinie Stabendmomente Momentenverlauf<br />
Knotenverdrehung φ K<br />
M<br />
EI<br />
4<br />
s<br />
KL<br />
φ K<br />
EI<br />
MLK<br />
-2 φ<br />
s<br />
K<br />
Knotenverdrehung φ L<br />
EI<br />
M 2<br />
s<br />
KL<br />
φ L<br />
EI<br />
MLK<br />
- 4 φ<br />
s<br />
L<br />
Stabverdrehung ψ KL<br />
EI<br />
s<br />
M<br />
EI<br />
6 ψ<br />
s<br />
MKL<br />
-6 ψKL<br />
LK<br />
KL<br />
Stabverdrehung ψ LK<br />
EI<br />
s<br />
EI<br />
s<br />
MKL -6 ψ LK<br />
MLK<br />
6 ψ<br />
LK<br />
ps²<br />
ps²<br />
Streckenlast<br />
M KL<br />
- M LK<br />
-<br />
12<br />
12<br />
Temperaturdifferenz<br />
M<br />
KL<br />
α<br />
-EI<br />
T<br />
ΔT<br />
h<br />
h<br />
M<br />
LK<br />
α<br />
-EI<br />
T<br />
ΔT<br />
h<br />
h<br />
Einzellast<br />
M KL<br />
-Fsαβ²<br />
M LK<br />
-Fsαβ²<br />
Einzelmoment<br />
M KL<br />
<br />
M 2β 3β²<br />
<br />
M LK<br />
<br />
M 2α 3α²
Stabendmomente nach Theorie I. Ordnung für das Drehwinkelverfahren<br />
Grundstab 2<br />
Belastung+Biegelinie Stabendmomente Momentenverlauf<br />
Knotenverdrehung φ K<br />
M<br />
EI<br />
3<br />
s<br />
KL<br />
φ K<br />
Knotenverdrehung φ L<br />
M<br />
LK<br />
<br />
EI<br />
- 3<br />
s<br />
φ<br />
L<br />
Stabverdrehung ψ KL<br />
M<br />
EI<br />
- 3<br />
s<br />
KL<br />
ψ KL<br />
Stabverdrehung ψ LK<br />
M<br />
EI<br />
3<br />
s<br />
LK<br />
ψ LK<br />
Streckenlast<br />
M KL<br />
<br />
ps²<br />
-<br />
8<br />
Temperaturdifferenz<br />
M<br />
KL<br />
<br />
- 1.5 EI<br />
αTΔTh<br />
h<br />
Einzellast<br />
M KL<br />
1 1 <br />
Fsα<br />
β<br />
β ² <br />
2 2 <br />
Einzelmome nt<br />
M KL<br />
1 3 <br />
M<br />
β ² <br />
2 2
Berechnung von Einflusslinien für Kraftgrößen an<br />
statisch unbestimmten Systemen mit dem<br />
Kraftgrößenverfahren<br />
Berechnung der Einflusslinien für statisch Überzählige<br />
(vgl. Buch Tragwerke 2)<br />
Die Berechnung der Einflusslinie kann für jede beliebige statisch Überzählige X j des<br />
gewählten SGS erfolgen.<br />
Satz: Die Einflusslinie n X km einer statisch Überzähligen entsteht als Biegelinie des<br />
Lastgurtes infolge der Kraftgrößeneinwirkung X j = 0 β kj (j = a, b, .., i, ..n).<br />
Die Einflusslinie ergibt sich aus der Überlagerung der Einflusslinien der einzelnen<br />
Zustände der statisch Überzähligen.<br />
X j<br />
statisch Überzählige<br />
k Ort der gesuchten Einflussgröße<br />
n Grad der statischen Unbestimmtheit<br />
0 β kj Elemente der Matrix 0 β<br />
Matrix 0 β negative Inverse der Matrix 0 δ<br />
Berechnungsverfahren: Für eine Einflusslinie einer Kraftgröße an der Stelle k<br />
1. Wahl eines SGS, das die gesuchte(n) Einflussgröße(n) als statisch<br />
Überzählige besitzt<br />
2. Berechnung der Matrix 0 δ<br />
3. Berechnung der Matrix 0 β = - ( 0 δ -1 )<br />
Es sind 2 verschiedene Wege möglich, um die Einflusslinie zu bestimmen. Der<br />
Zeitpunkt der Superposition unterscheidet beide Algorithmen.<br />
Lösungsweg A<br />
4.A Ermittlung der n Biegelinien (jedes<br />
Einheitszustandes) infolge X j = 1<br />
(Biegelinie entspricht der EL)<br />
5.A Superposition der Biegelinien der<br />
Einzelzustände<br />
n X km = 0 β k1 * 0 δ m1 + 0 β k2 * 0 δ m2 + …+ 0 β kn * 0 δ mn<br />
Lösungsweg B<br />
4.B Belastung des SGS mit<br />
X 1 = 0 β k1 , X 2 = 0 β k2 ,… X n = 0 β kn<br />
(Superposition der Belastung)<br />
5.B Berechnung der Biegelinie<br />
(Biegelinie entspricht der EL)<br />
Diese Methode eignet sich vorrangig für die Bestimmung verschiedener Einflusslinien<br />
eines Systems.<br />
1
Alternative:<br />
Berechnung von Einflusslinien gemäß dem Satz von Land<br />
Satz von Land:<br />
Die Einflusslinie für eine Kraftgröße an der Stelle k entsteht als Biegelinie des<br />
Lastgurtes, wenn man am Ort k der gesuchten Einflusslinie die Kraftgröße durch ein<br />
Gelenk aus der kraftschlüssigen Bindung befreit und im Gelenk die zur Kraftgröße<br />
arbeitskonforme Weggröße „-1“ einprägt.<br />
Die Berechnung der Einflusslinie ist als Lastfall eingeprägter Weggrößen<br />
(Wegsprung) zu betrachten.<br />
vgl. Arbeitsblatt: Berechnung statisch unbestimmter Systeme unter der Einwirkung<br />
von eingeprägten Weggrößen<br />
Der Berechnungsgang wird maßgeblich von der Wahl des SGS bestimmt.<br />
1. Variante: Kombinierte Gelenkmethode<br />
Eine der statisch Überzähligen X i im SGS entspricht der gesuchten Einflussgröße. An<br />
dieser Stelle wird gemäß des Satzes von Land der arbeitskonforme Wegsprung von<br />
„-1“ eingeführt.<br />
am Ort der gesuchten Einflussgröße δ i = −1<br />
für alle andere „Gelenke“ gilt der Gelenkschluss d. h. δ i = 0<br />
δ 10 , δ 20 , .. δ i0 = 0<br />
2. Variante: Getrennte Gelenkmethode<br />
Das SGS wird so gewählt, dass keine der statisch Überzähligen der gesuchten<br />
Einflussgröße entspricht.<br />
für alle eingeführten Gelenke gilt der Gelenkschluss, d.h. δ i = 0<br />
die Größen δ 10 , δ 20 , .. δ i0 sind zu bestimmen<br />
Die Ermittlung der Größen δ 10 , δ 20 , .. δ i0 kann erfolgen mit<br />
a) PVK<br />
z. B. Einflusslinie der Querkraft im Punkt k, gemäß Satz von Land ist an der<br />
Stelle k der Wegsprung von „-1“ als Belastung einzuprägen, n = 2-fach<br />
statisch unbestimmt δ 20<br />
δ 1 Q k<br />
* ∆w<br />
0 δ 1 Q *( −1)<br />
0<br />
20<br />
* +<br />
2 k 0<br />
=<br />
b) Polplan<br />
20<br />
* + k 2<br />
=<br />
Nach Lösung des Gleichungssystems und Superposition der Lösung wird die<br />
Biegelinie ermittelt (PVK mit Reduktionssatz, ω-Verfahren, etc.).<br />
2
Ermittlung der geometr. Unbestimmheit<br />
1. System gedanklich in einzelne Staäbe unterteilen, die durch Auflager oder<br />
Geometriesprünge begrenzt werden.<br />
(1)<br />
(2)<br />
(3)<br />
2.<br />
Anordnen von Drehfesseln an den markanten Punkten, an denen weder die Verdrehung<br />
noch das Moment bekannt ist.<br />
2 Drehfesseln<br />
3. Prüfen am Gelenkwerk (Momentengelenke an den markanten Punkten bzw. Stabendpunkten<br />
einfügen), ob dann das System verschieblich ist und ggf. durch Anordnen von Wegfesseln<br />
unverschieblich machen.<br />
B2S<br />
B2S<br />
B2S<br />
beachte: EA<br />
∞<br />
1 Wegfessel erforderlich<br />
(unterschiedliche Anordnung<br />
möglich)<br />
B2S<br />
3GR<br />
4.<br />
Der Grad der geometr. Unbestimmheit ergibt sich als die Summe aller Fesseln.<br />
3 fach geometr.<br />
unbestimmt
Kraftgrößenverfahren (KGV)<br />
1. Bestimmung des Grades der statischen Unbestimmtheit<br />
Abzählkriterium, Aufbauprinzip<br />
2. Wahl eines statisch bestimmten Grundsystems (SGS) / Hauptsystems<br />
(HS) und Festlegung der statisch Überzähligen X i , i=1,...,n<br />
kein kinematisch verschiebliches System oder Teilsystem entwickeln<br />
möglichst wenig gemeinsame „Momentenflächen“ einzelner Zustände,<br />
Ziel: geringer Aufwand beim PVK<br />
3. Ermittlung der Schnitt- und Auflagergrößen der Lastzustände am<br />
SGS/HS<br />
N XL , Q XL , M XL , … N XV , Q XV , M XV „0“-Zustand: „N 0 “, „Q 0 “und „M 0 “<br />
4. Ermittlung der Schnitt- und Auflagergrößen der n Einheitszustände am<br />
SGS/HS<br />
X i =1: N xi, Q xi , M xi<br />
„1“, „2“, …, „n“-Zustände: z. B.: „N 1 “, „Q 1 “und „M 1 “ etc.<br />
5. Bestimmung aller Klaffungen (Gelenkverformungen) der Lastzustände<br />
sowie der n Einszustände mit dem PVK<br />
L<br />
N<br />
xk<br />
QxiQxk<br />
M<br />
xk ΔT<br />
1⋅δ ik<br />
= ∫{<br />
N<br />
xi[<br />
+ αTT]<br />
+ + M<br />
xi[<br />
+ αT<br />
]} dx +<br />
EA GA EI h<br />
−<br />
∑<br />
L<br />
C<br />
Li<br />
0<br />
⋅c<br />
Lk<br />
−<br />
∑<br />
w<br />
M<br />
wi<br />
ϕ<br />
wk<br />
Q<br />
∑<br />
n<br />
N<br />
ni<br />
c<br />
N<br />
n<br />
nk<br />
+<br />
∑<br />
m<br />
M<br />
mi<br />
c<br />
M<br />
m<br />
mk<br />
6. Aufbau und Lösung des Systems der Elastizitätsgleichungen<br />
δ = δ<br />
i<br />
i0<br />
+ X<br />
⇒ Beispiel<br />
1<br />
* δ<br />
11<br />
+ ... + X<br />
n<br />
* δ<br />
in<br />
= 0<br />
Cramersche Regel:<br />
Ist A eine quadratische (n,n)-Matrix mit | A | ≠ 0, so ist<br />
δ = δ<br />
1<br />
2<br />
⎡δ<br />
⎢<br />
⎣δ<br />
11<br />
21<br />
10<br />
δ = δ<br />
20<br />
+ X<br />
1<br />
+ X<br />
1<br />
* δ<br />
1<br />
2<br />
11<br />
* δ<br />
δ12<br />
⎤ ⎡ X<br />
⎥ *<br />
δ<br />
⎢<br />
22 ⎦ ⎣X<br />
21<br />
+ X<br />
2<br />
+ X<br />
2<br />
* δ<br />
12<br />
* δ<br />
22<br />
⎤ ⎡−<br />
δ10<br />
⎤<br />
⎥ = ⎢ ⎥<br />
⎦ ⎣−<br />
δ<br />
20 ⎦<br />
= 0<br />
= 0<br />
das LGS A * x r = b r eindeutig lösbar. Für die Lösungen<br />
x r = (x 1 , x 2 , … , x n ) gilt:<br />
x i = | A i | / | A | , für i = 1, 2, … , n<br />
wobei A i die (n,n)-Matrix ist, die aus A entsteht, indem<br />
r<br />
man die i-te Spalte von A durch b ersetzt.<br />
7. Ermittlung der wirklichen Schnitt- und Auflagergrößen durch<br />
Superposition<br />
z. B. M ges = M 0 + X 1 *M 1 + ….. + X n *M n
Berechnung statisch unbestimmter Systeme unter der<br />
Einwirkung von eingeprägten Weggrößen<br />
Beispiele:<br />
- Auflagerverdrehung ∆ φ<br />
- Stützensenkung u z , u x<br />
- Winkelsprung ∆φ<br />
- Verschiebungssprung ∆ u z , ∆ u x<br />
Es gilt die Polplankinematik, d. h. eingeprägte Weggrößen bewirken keine<br />
Schnittgrößen am statisch bestimmten System. Statisch bestimmte Systeme sind in<br />
der Lage sich zwangsfrei zu verformen.<br />
Erfassung des Lastfalls „eingeprägte Verschiebung“ im Kraftgrößenverfahren<br />
Der Berechnungsgang wird maßgeblich von der Wahl des SGS bestimmt.<br />
1. Variante:<br />
Einführung der statisch unbestimmten Größen X i als arbeitskonforme Größe zur<br />
eingeprägten Weggröße.<br />
δ 10 , δ 20 , .. δ i0 = 0<br />
aber δ i = δ an Orten eingeprägter Verschiebungen δ arbeitskonform zur Unbekannten<br />
X i bzw. δ i = 0 sonst<br />
2. Variante:<br />
Das SGS wird so gewählt, dass keine der statisch Unbestimmten arbeitskonform zu<br />
eingeprägten Verschiebungsgrößen wirkt.<br />
δ i = 0<br />
Die Ermittlung der Größen δ 10 , δ 20 , .. δ i0 kann erfolgen mit<br />
a) PVK<br />
b) Polplan
Ausnutzung der Symmetrieeigenschaften des Systems<br />
Berechnung am halben System<br />
Gruppenlasten<br />
1. Berechnung am halben System<br />
Vorraussetzung:<br />
Es muss ein symmetrisches System vorliegen, dass entweder eine symmetrische<br />
oder antimetrische Belastung aufweist. Eine beliebige Belastung kann mittels einer<br />
Belastungsumordnung (BU-Verfahren) in symmetrische und antimetrische<br />
Lastanteile aufgeteilt werden.<br />
Gemäß der vorliegenden Belastungsform (symmetrisch oder antimetrisch) wird das<br />
das halbe System mit den entsprechenden Randbedingungen in der<br />
Symmetrieachse entwickelt. Die Berechung erfolgt am halben System.<br />
Für die Berechnung am halben System wird auf das Arbeitsblatt „Symmetrie“<br />
verwiesen.<br />
2. Berechnung mittels Gruppenlasten<br />
Bei der Berechnung symmetrischer Tragwerke nach dem Kraftgrößenverfahren mit<br />
Gruppenlasten bleibt die Anzahl der Unbekannten n stets erhalten.<br />
Es gilt: n = n symm + n anti<br />
Ferner gilt für die Anzahl der Unbekannten der symmetrischen und antimetrischen<br />
Zustände:<br />
Kraftgrößenverfahren<br />
Symmetrie Antimetrie<br />
n n<br />
n symm<br />
≥ n anti<br />
≤<br />
2 2<br />
Vorgehensweise mit Gruppenlasten:<br />
1. SGS muss symmetrisch sein<br />
2. Anzahl der Gruppenzustände == Grad der statischen Unbestimmtheit<br />
3. Gruppen so wählen, dass sie paarweise (2 Kraftgrößen) symmetrisch bzw.<br />
antimetrisch sind<br />
4. das Einfügen eines Gelenks (statisch Überzählige) in der Symmetrieachse<br />
bildet mit dieser Kraftgröße einen Gruppenzustand, der entweder symmetrisch<br />
oder antimetrisch ist<br />
5. Die Überlagerung von symmetrischen und antimetrischen Zuständen ergibt Null
3. Gegenüberstellung der Verfahren<br />
Berechnung am halben System<br />
Vorteile:<br />
Bei antimetrischer Belastung kann die<br />
statische Unbestimmtheit entschieden<br />
verringert sein<br />
Berechnung mittels Gruppenlasten<br />
Nachteil:<br />
Das Verfahren ist weniger anschaulich.<br />
Nachteile:<br />
Die Belastung muss entweder<br />
symmetrisch oder antimetrisch sein,<br />
um die Symmetriebedingungen<br />
anwenden zu können.<br />
Eine Zerlegung einer beliebigen Last in<br />
symmetrischen und antimetrischen<br />
Anteil nach dem<br />
Belastungsumordnungsverfahren ist<br />
möglich. Jedoch gehen die Vorteile<br />
aufgrund dieser Berechnung aufgrund<br />
eines symmetrischen und<br />
antimetrischen Berechnungsgang<br />
verloren.<br />
Vorteil:<br />
Die Belastung muss nicht symmetrisch<br />
sein.<br />
Durch eine Entkopplung der<br />
symmetrischen und antimetrischen<br />
Einheitszustände wird das<br />
Gleichungssystem vereinfacht. Dieses<br />
Verfahren ist auch auf unsymmetrische<br />
begrenzt anwendbar.