Berichte der Bundesanstalt für Straßenwesen
Berichte der Bundesanstalt für Straßenwesen
Berichte der Bundesanstalt für Straßenwesen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
keiten vollzieht sich nach ANDERSON (1982; 2001)<br />
in einem dreistufigen Prozess:<br />
• kognitive Phase: Vermittlung <strong>der</strong> deklarativen<br />
Wissensbasis (Schritt <strong>für</strong> Schritt handeln, wissensbasiert)<br />
• assoziative Phase: Prozeduralisierung/ Kompilierung<br />
(Verkettung einzelner Handlungsschritte,<br />
regelbasiert)<br />
• autonome Phase: Automatisierung/ Tuning<br />
(automatisierte Ausführung, Generalisierung,<br />
Differenzierung, fertigkeitsbasiert)<br />
Jede dieser Phasen ist an spezifische instruktionale<br />
Bedingungen geknüpft und erfor<strong>der</strong>t unterschiedliche<br />
Aktivitäten auf Seiten des Lerners. Während zu<br />
Beginn des Lernprozesses <strong>der</strong> Erwerb neuen Wissens<br />
im Vor<strong>der</strong>grund steht, bedingt die Übertragung<br />
dieses Wissens in Prozeduren, <strong>der</strong>en Automatisierung<br />
sowie <strong>der</strong> Transfer in praxistaugliche Kompetenzen<br />
im weiteren Verlauf die Übung und Anwendung<br />
des Wissens bei zunehmen<strong>der</strong> Realitätsnähe<br />
(ökologische Validität). Dieser Prozess ist extrem<br />
zeitintensiv und, wie einschlägige Unfallstatistiken<br />
implizieren (Fahranfänger weisen danach die<br />
höchste Unfallrate auf), mit dem Erwerb des Führerscheins<br />
noch lange nicht abgeschlossen (STA-<br />
TISTISCHES BUNDESAMT, 2006). Insbeson<strong>der</strong>e<br />
in komplexen Fahr- und Verkehrsituationen scheinen<br />
Fahranfänger schnell an ihre Kapazitätsgrenzen<br />
zu stoßen (vgl. Kap. 1). Die <strong>für</strong> die hinreichende<br />
Automatisierung fahraufgabenrelevanter Kompetenzen<br />
erfor<strong>der</strong>liche Praxis unter ökologisch validen<br />
Bedingungen (3. Stufe des Fertigkeitserwerbs) ist<br />
jedoch im Rahmen <strong>der</strong> herkömmlichen Fahrausbildung<br />
nur schwer zu gewährleisten. Dies betrifft insbeson<strong>der</strong>e<br />
den Aufbau von Notfallreaktionen in Bezug<br />
auf beson<strong>der</strong>s kritische Fahr- und Verkehrssituationen,<br />
die im täglichen Straßenverkehr nur selten<br />
auftreten o<strong>der</strong> <strong>der</strong>en explizite Thematisierung<br />
ein zu großes Risiko darstellt. Aufgrund <strong>der</strong> mit<br />
ihnen verbundenen Darstellungs- und Interaktionsmöglichkeiten<br />
erscheint <strong>der</strong> Einsatz neuer Lerntechnologien<br />
zur Kompensation dieser Defizite hierbei<br />
vielversprechend (höhere ökologische Validität). Allerdings<br />
ist neben den spezifischen Anfor<strong>der</strong>ungen<br />
an Lernaktivitäten je nach Stufe des Kompetenzerwerbs<br />
zudem zu berücksichtigen, dass fahraufgabenrelevante<br />
Fertigkeiten je nach Fahraufgabenebene<br />
in unterschiedlichem Maße auf explizierbarem<br />
Wissen basieren und unterschiedlich stark automatisierbar<br />
sind:<br />
• Navigationsaufgaben sind in <strong>der</strong> Regel an eine<br />
bewußte Informationsverarbeitung geknüpft<br />
und daher nur schwer automatisierbar (allerdings<br />
auch nur in geringem Maße sicherheitsrelevant)<br />
13<br />
• Führungsaufgaben bedingen sowohl bewußte<br />
als auch unbewußte Informationsverarbeitung<br />
und sind teilweise an den Aufbau von Regelwissen<br />
geknüpft (d.h. den Abruf eines Repertoires<br />
an Verhaltensmustern aufgrund situativer Gegebenheiten).<br />
Dieses ist bis zu einem gewissen<br />
Grad automatisierbar (und hochgradig sicherheitsrelevant)<br />
• Stabilisierungsaufgaben basieren auf reflexartigen<br />
(automatischen) Reiz-Reaktions-<br />
Mechanismen und sind hochgradig automatisierbar<br />
(und hochgradig sicherheitsrelevant)<br />
Kompetenzen zur Bewältigung von Fahraufgaben<br />
auf <strong>der</strong> Stabilisierungsebene (resp. die dort dominierenden<br />
perzeptuell-motorischen Fertigkeiten)<br />
werden demnach eher durch Übung und Erfahrung<br />
vermittelt (Learning by doing), während Kompetenzen<br />
zur Bewältigung von Führungs- und Navigationsaufgaben<br />
(resp. die hierbei dominierenden<br />
kognitiv-mentalen Fertigkeiten) in stärkerem Maße<br />
auf einer explizit vermittelten o<strong>der</strong> durch Exploration<br />
gewonnenen Wissensbasis aufbauen und erst<br />
anschließend über Übung und Erfahrung in eine<br />
prozedurale Form übertragen werden. Dementsprechend<br />
unterscheiden sich auch die Fehler, die je<br />
nach Fahraufgabenebene auftreten und auf den<br />
Ebenen „Stabilisierung“ und „Führung“ zu Unfällen<br />
führen können. Fehlhandlungen ergeben sich nach<br />
HACKER (1978) aufgrund<br />
• fehlen<strong>der</strong> Information,<br />
• fehlen<strong>der</strong> Nutzung vorhandener Information,<br />
• falscher Nutzung vorhandener Information.<br />
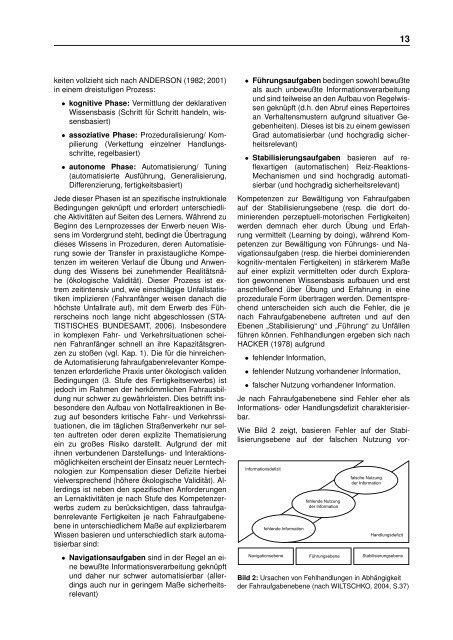
Je nach Fahraufgabenebene sind Fehler eher als<br />
Informations- o<strong>der</strong> Handlungsdefizit charakterisierbar.<br />
Wie Bild 2 zeigt, basieren Fehler auf <strong>der</strong> Stabilisierungsebene<br />
auf <strong>der</strong> falschen Nutzung vor-<br />
Informationsdefizit<br />
fehlende Information<br />
fehlende Nutzung<br />
<strong>der</strong> Information<br />
falsche Nutzung<br />
<strong>der</strong> Information<br />
Handlungsdefizit<br />
Navigationsebene Führungsebene Stabilisierungsebene<br />
Bild 2: Ursachen von Fehlhandlungen in Abhängigkeit<br />
<strong>der</strong> Fahraufgabenebene (nach WILTSCHKO, 2004, S.37)