15 Integralrechnung
15 Integralrechnung
15 Integralrechnung

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
504 <strong>15</strong> <strong>Integralrechnung</strong><br />
A y<br />
fx ( )<br />
y S<br />
−1<br />
x=f (y)<br />
x<br />
fx ( )<br />
A x<br />
y=f (x)<br />
x S<br />
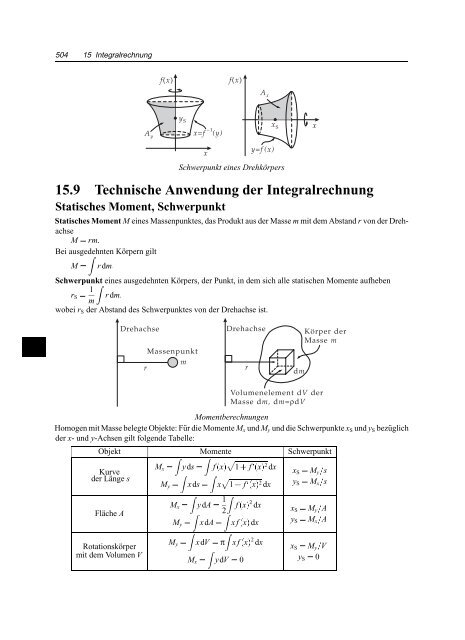
Schwerpunkt eines Drehkörpers<br />
<strong>15</strong>.9 Technische Anwendung der <strong>Integralrechnung</strong><br />
Statisches Moment, Schwerpunkt<br />
Statisches Moment M eines Massenpunktes, das Produkt aus der Masse m mit dem Abstand r von der Drehachse<br />
M = rm:<br />
Bei ausgedehnten Z Körpern gilt<br />
M = r dm:<br />
Schwerpunkt eines ausgedehnten Körpers, der Punkt, in dem sich alle statischen Momente aufheben<br />
rS = 1<br />
Z<br />
r dm�<br />
m<br />
wobei rS der Abstand des Schwerpunktes von der Drehachse ist.<br />
Drehachse<br />
Massenpunkt<br />
m<br />
r<br />
Drehachse<br />
r<br />
dm<br />
x<br />
Körper der<br />
Masse m<br />
Volumenelement dV der<br />
Masse dm, dm= ρdV<br />
Momentberechnungen<br />
Homogen mit Masse belegte Objekte: Für die Momente Mx und My und die Schwerpunkte xS und yS bezüglich<br />
der x- und y-Achsen gilt folgende Tabelle:<br />
Objekt Momente Schwerpunkt<br />
Z Z p<br />
Mx = yds = f (x) 1 + f 0 (x) 2 dx<br />
Kurve<br />
xS = Z Z My=s<br />
der Länge s<br />
p<br />
My = xds = x 1 + f 0 (x) 2 yS dx = Mx=s<br />
Z Z 1 2<br />
Mx = ydA = f (x) dx<br />
Fläche A<br />
2<br />
xS = Z Z My=A<br />
yS =<br />
My = xdA = xf(x)dx<br />
Mx=A<br />
Z Z<br />
2<br />
My = xdV = π xf(x) dx<br />
Rotationskörper<br />
xS = Z My=V<br />
mit dem Volumen V<br />
yS Mx = ydV = 0<br />
= 0