

Inverses Pendel - Technische Universität München
Inverses Pendel - Technische Universität München
Inverses Pendel - Technische Universität München

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
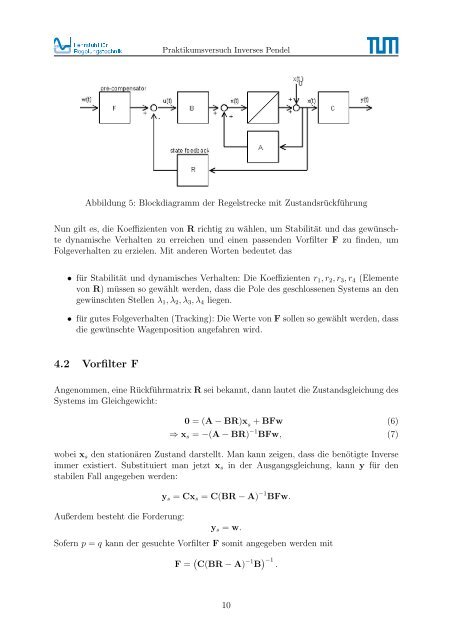
Praktikumsversuch <strong>Inverses</strong> <strong>Pendel</strong>Abbildung 5: Blockdiagramm der Regelstrecke mit ZustandsrückführungNun gilt es, die Koeffizienten von R richtig zu wählen, um Stabilität und das gewünschtedynamische Verhalten zu erreichen und einen passenden Vorfilter F zu finden, umFolgeverhalten zu erzielen. Mit anderen Worten bedeutet das• für Stabilität und dynamisches Verhalten: Die Koeffizienten r 1 ,r 2 ,r 3 ,r 4 (Elementevon R) müssen so gewählt werden, dass die Pole des geschlossenen Systems an dengewünschten Stellen λ 1 ,λ 2 ,λ 3 ,λ 4 liegen.• für gutes Folgeverhalten (Tracking): Die Werte von F sollen so gewählt werden, dassdie gewünschte Wagenposition angefahren wird.4.2 Vorfilter FAngenommen, eine Rückführmatrix R sei bekannt, dann lautet die Zustandsgleichung desSystems im Gleichgewicht:0 = (A−BR)x s+BFw (6)⇒ x s = −(A−BR) −1 BFw, (7)wobei x s den stationären Zustand darstellt. Man kann zeigen, dass die benötigte Inverseimmer existiert. Substituiert man jetzt x s in der Ausgangsgleichung, kann y für denstabilen Fall angegeben werden:y s = Cx s = C(BR−A) −1 BFw.Außerdem besteht die Forderung:y s = w.Sofern p = q kann der gesuchte Vorfilter F somit angegeben werden mitF = ( C(BR−A) −1 B ) −1.10













