

verm_kapitel03_1.pdf
verm_kapitel03_1.pdf
verm_kapitel03_1.pdf

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Vermessungsskript - Stand : SS2008<br />
3. Höhenunterschiede, Horizontalwinkel und Horizontalstrecken<br />
3.1 Höhenunterschiede<br />
grundlegend unterschiedliche Bestimmungsverfahren :<br />
• geometrisch := direkt<br />
• hydrostatisch<br />
• trigonometrisch := indirekt<br />
• barometrisch<br />
3.1.1 Prinzip (geometrisch)<br />
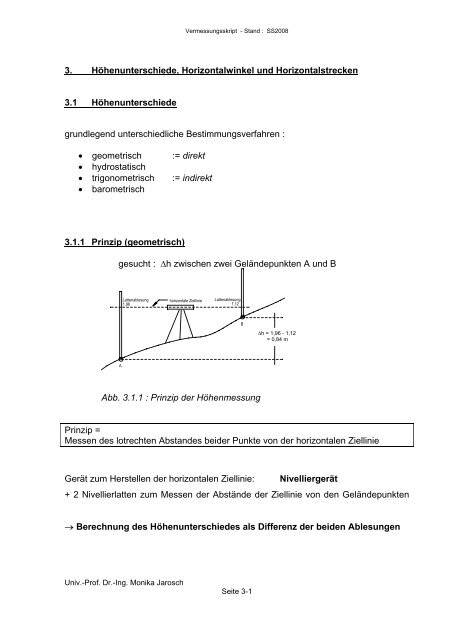
gesucht : ∆h zwischen zwei Geländepunkten A und B<br />
A<br />
Lattenablesung<br />
1,96<br />
horizontale Ziellinie<br />
Lattenablesung<br />
1,12<br />
Abb. 3.1.1 : Prinzip der Höhenmessung<br />
B<br />
∆h = 1,96 - 1,12<br />
= 0,84 m<br />
Prinzip =<br />
Messen des lotrechten Abstandes beider Punkte von der horizontalen Ziellinie<br />
Gerät zum Herstellen der horizontalen Ziellinie: Nivelliergerät<br />
+ 2 Nivellierlatten zum Messen der Abstände der Ziellinie von den Geländepunkten<br />
→ Berechnung des Höhenunterschiedes als Differenz der beiden Ablesungen<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-1
verallgemeinert:<br />
Rückblick r 1<br />
(rückwärts im<br />
Sinne d. Meß-<br />
richtung)<br />
A<br />
Festpunkt,<br />
Höhe über NN bekannt<br />
Vermessungsskript - Stand : SS2008<br />
Vorblick v 1<br />
WP<br />
Wechselpunkt<br />
Abb. 3.1.2 : Höhenübertragung<br />
hier :<br />
allgemein :<br />
I 1<br />
∆h<br />
∆h<br />
AB<br />
AB<br />
r 2<br />
∆h 1 = r 1-v 1<br />
Meßrichtung<br />
= ∆h + ∆h<br />
= ( r − v ) + ( r − v2)<br />
1 2 1 1 2<br />
∑ ∑ ∑<br />
= ∆h<br />
= r − v<br />
I 2<br />
i i i<br />
v2<br />
B<br />
∆h 2 = r 2-v 2<br />
Elimination des Einflusses der Erdkrümmung, sofern gleiche Zielweiten für<br />
Rückblick und Vorblick gegeben sind !<br />
3.1.2 Feldarbeiten und Auswertung von einfachen Liniennivellements<br />
Ziel : Bestimmung des Höhenunterschiedes zwischen A und B<br />
1. Latte auf A aufstellen, Instrument auf I1, Latte ablesen<br />
(cm ablesen, mm schätzen)<br />
2. Latte auf 1. Wechselpunkt stellen, Instrument drehen, WP1 ablesen<br />
(Zielweiten abschreiten → AI1 ≈ I1 WP1<br />
Schiefe der Ziellinie)<br />
, → Elimination des Einflusses der<br />
• Latte an den Wechselpunkten auf eine Bodenplatte, den sog. „Frosch“<br />
stellen (→ bei uns gelb), „Frosch“ gut in den Untergrund eintreten !<br />
A<br />
Abb. 3.1.3 : Erfassung der Messwerte in das Feldbuch<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
I2<br />
I1 WP 1 WP 2<br />
Seite 3-2<br />
I3<br />
WP 3<br />
B
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Vermessungsskript - Stand : SS2008<br />
3.1.3 Instrumente zur direkten Messung von Höhenunterschieden<br />
prinzipiell: Messfernrohr, dessen Zielachse horizontal ausgerichtet werden muss<br />
3.1.3.1 Zwei Typen von Nivellierinstrumenten :<br />
früher: Libellennivelliere<br />
heute: Kompensatornivelliere (analog/digital)<br />
1. Kompensatornivellier = automatisches Nivellier<br />
• Einspielen der Röhrenlibelle ist ersetzt durch ein mechanisch-optisches<br />
Bauteil<br />
→ Kompensator<br />
(= an dünnen Drähten hängende Spiegel, Prismen, Linsen)<br />
• Kompensator unterliegt der Erdschwerkraft<br />
→ er gleicht Neigungen der Zielachse bei jeder Zielung selbsttätig aus<br />
• Vorhorizontierung geschieht anhand der Dosenlibelle<br />
⇒ ! schneller !<br />
2. Digital-Kompensatornivellier<br />
• elektronisch messend<br />
• automatisch rechnend und registrierend<br />
→ internes REC-Modul<br />
→ Kabelanschluss zu externer Registriereinheit<br />
• Kombinivellierlatte mit klassischer Skalenteilung (→ visuelle Messung)<br />
und Strichcode (→ elektronische Messung)<br />
Strichcode : Codebild<br />
⇒ digitales Messsignal<br />
⇒ Bildverarbeitung : Korrelation, bis Übereinstimmung mit Referenzsignal<br />
Seite 3-3
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Vermessungsskript - Stand : SS2008<br />
3.1.3.2 Klassifizierung nach Genauigkeiten<br />
Genauigkeitsstufe<br />
einfache Genauigkeit<br />
hohe Genauigkeit<br />
höchste Genauigkeit <br />
Standardabweichung<br />
für 1 km Doppelnivellement<br />
Baunivellier<br />
• technische Nivellements auf Baustellen<br />
• Aufnahme von Längs- und Querprofilen<br />
• Flächennivellements<br />
Seite 3-4<br />
Verwendungszweck<br />
Beispiel<br />
σn ≤ Zeiss Leica<br />
6 mm Baunivellier NI 50 Wild NA<br />
20<br />
2 mm Ingenieur- NI 30, NI NA 2002<br />
nivellier 40<br />
0,5 mm Feinnivellier NI 2 NA 5000<br />
Ingenieurnivellier<br />
• amtliche Festpunktnivellements im Netz 3.Ordnung<br />
• Geländeaufnahmen für Massenberechnungen<br />
• Straßen-, Brücken-, Tunnelbau<br />
Feinnivellier<br />
• amtliche Festpunktnivellements in den Netzen 1. und 2.Ordnung<br />
• Überwachung von Staumauern, Brücken, Fundamenten
Vermessungsskript - Stand : SS2008<br />
3.1.4 Überprüfung eines Nivelliers<br />
3.1.4.1 Justieranforderungen<br />
wesentliche Voraussetzung :<br />
Abb. 3.1.4 Voraussetzung<br />
horizontale<br />
Ziellinie<br />
Wie ist diese Voraussetzung realisiert ? ... also genauer :<br />
Strichplatte<br />
Fadenkreuz<br />
Fernrohrlibelle<br />
VV<br />
Vertikalachse<br />
Meßfernrohr<br />
Abb. 3.1.5 Aufbau eines Nivelliers<br />
LL Libellenachse .<br />
ZZ Zielachse<br />
Die Libellenachse ist<br />
eine Tangente an der<br />
Lauffläche der Libelle<br />
im Normalpunkt<br />
Justierbedingungen : 1. LL ll ZZ (Libellenachse parallel zur Zielachse)<br />
2. LL ⊥ VV (Libellenachse senkrecht auf der Vertikalachse)<br />
sofern nicht gegeben:<br />
Bestimmung des Spielpunktes der Libelle<br />
und mittels Libellenjustierschraube auf Normalpunkt einspielen<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-5
Latte 1<br />
r r<br />
r ' = r+d<br />
r ' = r+d<br />
Zielweite<br />
Rückblick<br />
Vermessungsskript - Stand : SS2008<br />
Einfluss einer fehlerhaften Justierung :<br />
Abb. 3.1.6 Fehlerhafte Justierung<br />
Zielweite<br />
Vorblick<br />
v<br />
Latte 2<br />
v ' = v+d<br />
der Fehlereinfluss ist Zielweiten-abhängig !<br />
⇓<br />
gleiche Zielweiten für Rückblick und Vorblick<br />
⇓<br />
automatische Elimination des Fehlereinflusses<br />
Folgerungen :<br />
∆hfehlerfrei = r - v<br />
∆hfehlerbehaftet = r ‘ - v ‘<br />
= (r + d) - (v + d)<br />
= r + d - v - d<br />
= r - v<br />
• Messanordnung (d.h. das Einrichten der Zielweiten) beeinflusst unmittelbar<br />
die erreichbare Genauigkeit<br />
• geeignete Messanordnung erlaubt die Überprüfung des Nivelliers !<br />
⇓<br />
Prüfverfahren für Nivelliere<br />
= Kombination aus Aufstellungen,<br />
die automatisch zur Elimination des Fehlereinflusses führen<br />
⇒ „Sollwerte“<br />
mit Aufstellungen, die den ggf. vorhandenen Fehlereinfluss beinhalten<br />
⇒ „Istwert“<br />
Vergleich von Soll- und Istwerten läßt dann eine Aussage über<br />
die (De-)Justierung des Gerätes zu.<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-6
Vermessungsskript - Stand : SS2008<br />
Es gibt eine Reihe unterschiedlicher Verfahren zur Justierung :<br />
• im Feld :<br />
• im Labor :<br />
→ Nivellement aus der Mitte<br />
→ Verfahren nach Kukkamäki<br />
→ Verfahren nach Nähbauer<br />
→ Kollimator<br />
3.1.4.2 Nivellement aus der Mitte<br />
Voraussetzung : Zielweite Rückblick ≈ Zielweite Vorblick !<br />
⇓<br />
a) Instrumentenaufstellung 1<br />
r1<br />
r1´=r1+d<br />
= 1,234<br />
d<br />
Latte A<br />
α<br />
s ~ 15 m<br />
1<br />
∆hkorrekt := Sollwert<br />
α<br />
s ~ 15 m<br />
2<br />
d<br />
Latte B<br />
Abb. 3.1.7 Nivellement aus der Mitte 1<br />
v1<br />
v1´=v1+d<br />
= 1,111<br />
si ... Zielweiten ; s1 = s2 !<br />
r1 ... theoretisch korrekter Rückblick<br />
(existiert real nicht)<br />
v1 ... theoretisch korrekter Vorblick<br />
(existiert real nicht)<br />
d ... aus fehlerhafter Justierung für<br />
s1 resultierender Fehler<br />
r1´ ... fehlerbehaftete tatsächliche<br />
Ablesung im Rückblick<br />
(z.B. Lattenablesung = 1,234)<br />
v1´ ... fehlerbehaftete tatsächliche<br />
Ablesung im Vorblick<br />
(z.B. Lattenablesung = 1,111)<br />
∆h´ = r1´ - v1´ = (r1 + d) - (v1 + d) = r1 + d - v1 - d = r1 - v1 = ∆hfehlerfrei<br />
∆h ist aufgrund der Messanordnung fehlerfrei :=<br />
Sollwert (im Beispiel : +0,123) ! = ∆h fehlerfrei<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-7
Vermessungsskript - Stand : SS2008<br />
b) Instrumentenaufstellung 2 (Latten unverändert !)<br />
r2= Soll<br />
= 1,122<br />
r2 ‘<br />
=1,118<br />
d<br />
d<br />
Latte A<br />
s ~ 15 m<br />
1<br />
d<br />
α<br />
s ~ 15 m<br />
2<br />
Latte B<br />
Abb. 3.1.8 Nivellement aus der Mitte 2<br />
v2 ‘ = v2<br />
= 0,999<br />
ca.3 m<br />
Instrumentenstandpunkt unmittelbar an der Vorblicklatte<br />
„kein“ Fehlereinfluss an der Vorblicklatte (vernachlässigbar klein !)<br />
doppelter Fehlereinfluss an der Rückblicklatte<br />
= Fehlereinfluss aus fehlerhafter Justierung für s1 + s2 ( = 2 ∗ s1)<br />
∆h zwischen A und B unverändert<br />
⇒ ∆h = r2 - v2<br />
• Ermittlung der Soll-Ablesung :<br />
r2 = ∆h + v2 ⇒ Vorhersage derSoll-Ablesung auf die Rückblicklatte<br />
= rSoll (im Beispiel : 0,123 + 0,999 = 1,122)<br />
• Ist-Ablesung an der Rückblicklatte :<br />
= rIst<br />
r2 ´ = 1,118<br />
⇒ Interpretation :<br />
Gegenüberstellung von r2 und r2´ unter Berücksichtigung der Zielweite !<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-8<br />
⇓
1,122<br />
Vermessungsskript - Stand : SS2008<br />
-<br />
1,118<br />
= 0,004 = 4 mm<br />
d d<br />
d<br />
~ 30 m<br />
Abb. 8.6 Interpretation der Ist-<br />
Ablesung<br />
α<br />
tan α =<br />
⇒ Maßnahme : Verschiebung des Fadenkreuzes auf die Soll-Ablesung<br />
3.1.4.3 Justierung am Kollimator<br />
Kollimator = • Fernrohr, auf ∞ eingestellt,<br />
Kollimation (Optik) :<br />
(Messtechnik) :<br />
beleuchtetes Strichkreuz in der Brennebene<br />
• Libelle ⇒ Zielachse streng horizontiert<br />
Erzeugung paralleler Strahlen<br />
2 Fernrohre mit parallelem Strahlengang<br />
(d.h. Fokussierung auf Unendlich)<br />
gegeneinander ausrichten<br />
Kollimator Nivellier<br />
Lampe Strichplatte<br />
Fadenkreuz<br />
Abb. 3.1.9 Justierung am Kollimator<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-9<br />
0, 004<br />
30<br />
⇒ α = 8,5<br />
mgon<br />
Justierung :<br />
Verschiebung<br />
des<br />
Fadenkreuzes<br />
bis<br />
in den Brennpunkt
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Vermessungsskript - Stand : SS2008<br />
Anwendung : • das zu justierende Nivellierinstrument ebenfalls auf ∞ stellen<br />
dann entweder (bei Libellen- oder Kippschraubennivellieren)<br />
• Strichkreuz des Prüflings über die Kippschraube des Nivelliers mit<br />
dem Strichkreuz des Kollimators zur Deckung bringen und danach<br />
die Libelle mit der Libellenjustierschraube einspielen<br />
oder (bei Automatischen Nivellieren)<br />
• die Dosenlibelle des Prüflings einspielen und dann<br />
das Strichkreuz mit der Strichkreuzberichtigungsschraube in Übereinstimmung<br />
bringen<br />
mit dem Strichkreuz des Kollimators<br />
Seite 3-10
3.2 Horizontalwinkel<br />
3.2.1 Prinzip<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Vermessungsskript - Stand : SS2008<br />
→ alle Aufnahmeverfahren zur Koordinatenbestimmung sind bezogen auf<br />
ein ebenes Koordinatensystem<br />
→ es muss eine vertikale Projektion der Messelemente wie Winkeln und<br />
Strecken in eine ebene Bezugsfläche stattfinden<br />
Definitionen<br />
Horizontalwinkel<br />
= Vertikalprojektion eines Raumwinkels auf eine Horizontalebene<br />
Raumwinkel ⇒ Winkel zwischen zwei räumlichen Geraden<br />
:= Differenz zweier Richtungen<br />
Ein Winkel entsteht durch Ablesen von zwei Richtungen<br />
(=Messwerten)<br />
und Berechnung<br />
von: „rechte“ Richtung - „linke“ Richtung<br />
(2. Richtung – 1. Richtung)<br />
Zur Richtungsmessung benötigt man als Instrument einen Theodolit.<br />
Seite 3-11
Vermessungsskript - Stand : SS2008<br />
3.2.2 Feldarbeiten und Auswertung von Richtungsbeobachtungen<br />
Ziel: von einem Punkt S aus<br />
Richtungen beobachten zu 3 Zielen<br />
⇒ Berechnung beliebiger Winkel, die sich<br />
aus folgenden Kombinationen ergeben:<br />
α<br />
α<br />
Μ<br />
α<br />
= r − r<br />
12 2 1<br />
= r − r<br />
1 3 3 1<br />
= r − r<br />
ij j i<br />
3.2.2.1 Aufstellen des Theodolits<br />
S<br />
r 1<br />
α 12<br />
α 13<br />
1<br />
Abb. 3.2.1 : Richtungsbeobachtung<br />
• Theodolit auf Stativ aufschrauben<br />
• Stativ über dem Bodenpunkt zentrieren und horizontieren<br />
Zentrierung mit (- Schnurlot)<br />
- optischem Lot oder<br />
(- Zentrierstativ mit Stablot)<br />
Hilfsmittel für die Horizontierung : Libellen<br />
Dosenlibelle • ein rundes Glasgefäß<br />
• innen oben kugelförmig<br />
• gefüllt mit Äther oder Alkohol bis auf einen kleinen<br />
Rest, die Libellenblase!<br />
• ist die Dosenlibelle eingespielt ⇒<br />
Tangentialebene II zur Aufsatzebene<br />
• Justierung:<br />
Ausschlag zur Hälfte mit Stellschraube beseitigen<br />
Röhrenlibelle • zylindrische Glasröhre<br />
• innen oben tonnenförmig,<br />
im Längsschnitt als Kreisbogen<br />
• gefüllt mit Äther<br />
• Teilung mit Strichen:<br />
Abstand = Pars<br />
Mittelpunkt = Normalpunkt<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-12<br />
r 3<br />
r 2<br />
3<br />
2
• Zentrierung mit Schnurlot<br />
Vermessungsskript - Stand : SS2008<br />
1. Grundaufstellung = Grobhorizontierung<br />
Stativteller möglichst horizontal stellen<br />
und grobe Zentrierung mit dem Lot<br />
2. Eintreten der Stativbeine in den Untergrund<br />
3. Feinzentrierung durch Verschieben des Theodolits<br />
auf dem Stativtelle<br />
4. Grobhorizontierung des Theodolits mit der Dosenlibelle<br />
5. Feinhorizontierung mit der Röhrenlibelle<br />
Achtung: Libellen reagieren auf Sonnenbestrahlung →<br />
evtl. mit Feldschirm arbeiten !<br />
• Zentrierung mit optischem Lot<br />
Achtung: Voraussetzung ist Zielachse Lot II Stehachse Theodolit<br />
1. Grundaufstellung per Augenmaß<br />
2. Oberbau des Theodolits mit der Röhrenlibelle<br />
parallel zu 2 Stativbeinen stellen (s.Skizze)<br />
3. Grobzentrierung:<br />
optisches Lot mit den Dreifußschrauben auf<br />
das Zentrum des Bodenpunktes einstellen<br />
4. Grobhorizontierung (sorgfältig !):<br />
Einspielen der Dosenlibelle mit Stativfüßen<br />
5. Feinhorizontierung mit den Dreifußschrauben<br />
(Röhrenlibelle)<br />
(Vorsicht: Schwenken der Ziellinie !)<br />
6. Feinzentrierung:<br />
Verschieben des Theodolits auf dem Stativteller<br />
1<br />
2<br />
Abb. 3.2.2<br />
Kontrolle: ist das optische Lot dejustiert ?<br />
Prüfung in diametralen Stellungen und ggf. das Mittel nehmen,<br />
falls sich die Zielung ändert.<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-13<br />
3
• Zentrierung mit Zentrierstab<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Vermessungsskript - Stand : SS2008<br />
1. Grundaufstellung:<br />
Theodolit auf Stativkopf (nicht -teller !) klemmen<br />
2. Grobzentrierung:<br />
Spitze des Zentrierstabes auf Zentrum des Bodenpunktes stellen<br />
3. Grobhorizontierung:<br />
mit den Stativbeinen die Dosenlibelle am Zentrierstab einspielen<br />
4. Eintreten der Stativbeine in den Untergrund<br />
5. Feinzentrierung :<br />
durch Verschieben des Stativkopfes auf dem Stativteller<br />
→ Einspielung der Dosenlibelle<br />
6. Feinhorizontierung:<br />
die Röhrenlibelle mit den Dreifußschrauben einspielen<br />
Kontrolle: Zentrierstab drehen<br />
... um die Messanordnung zu verstehen:<br />
3.2.2.2 Grundzüge des Theodolitaufbaus<br />
Der Theodolit besteht aus dem Oberbau und dem Unterbau.<br />
• Oberbau → drehbar um die Vertikalachse<br />
bestehend aus dem Zeigerkreis = Alhidade (arabisch)<br />
darauf stehend: Fernrohrstützen mit Fernrohr und ggf. Höhenkreis<br />
• Unterbau → fest<br />
bestehend aus dem Dreifuß mit drei Fußschrauben und<br />
dem Horizontal-/Teilkreis mit Grad-/Gonteilung<br />
modifiziert zu: drehbarem Teilkreis = Limbus<br />
Seite 3-14
Vermessungsskript - Stand : SS2008<br />
⇒ Repetitionsverfahren:<br />
n aufeinander folgende Messungen eines Winkels werden auf dem Limbus<br />
mechanisch „aufaddiert“ (repetiert)<br />
⇒ Differenz zwischen Anfangs- und Abschlussablesung = n-facher Winkel<br />
! Wesentlich :<br />
Die Stelle auf dem Horizontalkreis, auf der abgelesen wird, kann variiert<br />
werden !<br />
3.2.2.3 Richtungs- und Satzmessung<br />
• Abfolge einer Messungsreihe (bei feststehendem Limbus !)<br />
a) alle Zielpunkte von links nach rechts<br />
in I. Fernrohrlage anzielen<br />
b) Fernrohr durchschlagen<br />
c) alle Ziele in umgekehrter Reihenfolge<br />
anzielen<br />
d) Ablesungen mitteln<br />
e) Mittel auf die erste Richtung reduzieren<br />
• Beobachtung weiterer Sätze :<br />
insgesamt n Stück → Limbus jeweils um 200<br />
n<br />
⇒ nur a) = Halbsatz<br />
⇒ a) - e) =<br />
Satz (Vollsatz)<br />
[gon] verstellen !<br />
(⇒ Verringerung des Einfluss der Teilungsungenauigkeiten des<br />
Horizontalkreises)<br />
→ nicht erforderlich bei elektronischen Theodoliten !<br />
• nur 1 Vollsatz :<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
zur Vermeidung grober Fehler bei der Ablesung des Teilkreises :<br />
Teilkreis um 1 bis 5 gon verstellen !<br />
Seite 3-15
3.2.3 Einteilung der Theodolite<br />
3.3 Vertikalwinkel<br />
Klassifizierungsmerkmal:<br />
• Genauigkeit<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Vermessungsskript - Stand : SS2008<br />
am Theodolit:<br />
→ Vertikal- / Höhenkreis<br />
→ Kreisableseeinrichtung, bzw. elektronische Ablesevorrichtung<br />
3.3.1 Höhenkreis<br />
... zentrisch an der Kippachse angebracht<br />
... Messgenauigkeit ist abhängig vom Kreisdurchmesser<br />
(„je größer, desto genauer“)<br />
Vorsicht bei älteren<br />
Instrumenten:<br />
„out“ …<br />
Bei neueren Instrumenten:<br />
- Angabe des Höhenwinkels<br />
- meistens linksläufige Winkel-Kreise mit 360° oder 2<br />
x 180°<br />
- Ablesung des Zenitwinkels<br />
- 400-gon-Teilung<br />
- durchweg rechtsläufige Winkel-Kreise<br />
Seite 3-16
3.3.2 Kreisablesevorrichtung<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Vermessungsskript - Stand : SS2008<br />
beim digitalen Theodolit<br />
(mit gleicher Funktion des Höhenindex):<br />
→ Realisierung über elektronische Abtastelemente<br />
3.3.3 Vertikalwinkelmessung<br />
→ Beobachtung der Zenitdistanz in 2 Lagen zum gleichen Ziel : zI , zII<br />
• Bedingung : zI + zII = 400 gon<br />
Ist diese Bedingung nicht erfüllt,<br />
liegt eine Indexabweichung vz vor !<br />
• Die Indexabweichung verfälscht<br />
die beiden Ablesungen zI ´und zII´<br />
• Durch Messung in 2 Lagen<br />
wird die Indexabweichung<br />
bestimmt und eliminiert:<br />
v<br />
z<br />
=<br />
400 −<br />
′<br />
( zI +<br />
2<br />
′<br />
zII<br />
)<br />
′<br />
z = z + v<br />
⇒ ,<br />
I I<br />
z<br />
′<br />
z = z + v<br />
II II z<br />
Seite 3-17<br />
Vertikalkreis<br />
300<br />
Ablesungen:<br />
300<br />
100<br />
0<br />
200<br />
0<br />
200<br />
400<br />
200<br />
fix im<br />
Gerät<br />
100<br />
Lage I<br />
V90 gon<br />
100<br />
Lage II<br />
V310 gon<br />
300<br />
90 + 310 = 400 gon<br />
Die zwei Instrumentenfehler bei der Vertikalwinkelmessung:<br />
1.<br />
Die Projektion der Zielachse<br />
des Fernrohres auf eine ver-<br />
z<br />
ß<br />
tikale Ebene „verschwenkt“<br />
gegenüber der Projektion<br />
der horizontalen Ebene.<br />
300<br />
200<br />
0<br />
Abb. 3.3.1 : Instrumentenfehler<br />
2.<br />
Die Verbindung der Ablesestellen<br />
mit dem Vertikalkreismittelpunkt<br />
weicht von<br />
der Horizontalen ab.<br />
⇒ für einen Standpunkt gilt:<br />
die Instrumentenfehler sind bei allen Sätzen zu allen Zielen nahezu konstant.<br />
100
3.4 Horizontalstrecken<br />
Vermessungsskript - Stand : SS2008<br />
3.4.1 Abhängigkeit vom Bezugshorizont<br />
A<br />
H(A)<br />
R<br />
S(B)<br />
S´<br />
S<br />
S(A)<br />
Abb. 3.4.1 : Bezugshorizont<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
B<br />
H(B)<br />
Seite 3-18<br />
Horizontalstrecke =<br />
Abstand s der Vertikalprojektion zweier<br />
Punkte, gemessen in der Bezugsfläche<br />
⇒ d.h. es muss eine Reduktion auf<br />
einen einheitlichen Bezugshorizont<br />
stattfinden !<br />
• Reduktion für Arbeiten im übergeordnetenLandeskoordinatensystem<br />
:<br />
s = s ∗<br />
A<br />
R<br />
R<br />
+ H<br />
A<br />
= s ∗<br />
R = Erdradius ≈ 6370 km<br />
B<br />
R<br />
R<br />
+ H<br />
• Bei Arbeiten für einzelne<br />
Bauvorhaben in großer Höhe :<br />
Einführung eines Bezugshorizontes<br />
B
Lagekoordinaten x, y:<br />
Vermessungsskript - Stand : SS2008<br />
in der Horizontalebene in Meereshöhe<br />
H = 0 m über NN<br />
Alle Darstellungen in Plänen und<br />
Karten sind von der ursprünglichen<br />
Höhe über NN auf Meereshöhe zu<br />
reduzieren.<br />
Beispiel :<br />
s0<br />
sH<br />
=<br />
6370km<br />
6370km+<br />
H<br />
s<br />
0<br />
Mit:<br />
= s<br />
H<br />
6370<br />
∗<br />
6370+<br />
0,<br />
2<br />
[ km]<br />
sH = 2000 m ⇒ s0 = 1999.937 m<br />
⇒ sH - s0 = 6,3 cm<br />
Beispiel: Kochertalbrücke<br />
Höhe: 500 m ü.NN ,<br />
Bauwerkshöhe: 180 m ;<br />
s500 m = 1100 m<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-19<br />
v<br />
v<br />
S 200<br />
R = 6370 km<br />
H = 200 m<br />
Abb. 3.4.2 : Einfluss auf lange Distanzen<br />
in großen Höhen<br />
S 0<br />
v<br />
v<br />
v<br />
v
500 m ü.NN<br />
320 m ü.NN<br />
0 m ü.NN<br />
180 m<br />
B<br />
A<br />
Vermessungsskript - Stand : SS2008<br />
Abb. 3.4.3 : Beispiel Kochertalbrücke<br />
A<br />
1<br />
.<br />
2<br />
.<br />
Im weiteren:<br />
1100 m<br />
Reduktion des Bauwerks in der Höhe 500 m<br />
auf NN (R = 6370 km) :<br />
⇒ R + HA = 6370,5 km<br />
63700<br />
mNN<br />
s500m − s0m = 1100 m ∗ ( 1 − ) = 86 , cm<br />
6370, 5<br />
Reduktion des Bauwerks in der Höhe 500 m<br />
auf (500 - 180) = 320 m<br />
(R = 6370,32 km) :<br />
⇒ R + HB = 6370,5 km<br />
Brücke<br />
6370, 32320<br />
m<br />
s500m − s320m = 1100 m ∗ ( 1 − ) = 31 , cm<br />
6370, 5<br />
s´AB<br />
sAB<br />
Abb. 3.4.4 : ebener Ansatz<br />
B<br />
s´ = Schrägentfernung<br />
Brücke<br />
s = Horizontalentfernung<br />
⇒ unterschiedliche Verfahren zur Bestimmung der Horizontalstrecke sAB :<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-20
3.4.2 Elektronische Distanzmessung<br />
Prinzip<br />
Vermessungsskript - Stand : SS2008<br />
→ Elektronische Distanzmessung ist ein Entfernungsmessverfahren<br />
mit elektromagnetischen Wellen.<br />
geeignet sind grundsätzlich alle elektromagnetischen Wellen ...<br />
extrem kurze Wellen<br />
(ultraviolett)<br />
↓<br />
• hohe Bündelungs-<br />
fähigkeit<br />
(zu starke<br />
Absorptionin<br />
der Atmosphäre)<br />
↓<br />
• zu geringe<br />
Reichweite<br />
Gamma-Strahlen<br />
3 pm<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Ultraviolett<br />
Photogr.Infrarot<br />
Sichtbare Strahlung<br />
Mikrowellen<br />
Wellen d. sichtbaren<br />
Lichts<br />
Infrarot<br />
möglichst kurze Wellen<br />
Mittleres Infrarot<br />
Nahes Infrarot<br />
Fernes Infrarot<br />
Röntgen-Strahlen Radar<br />
30 pm<br />
300 pm<br />
3 nm<br />
30 nm<br />
300 nm<br />
3 m<br />
µ<br />
Abb. 3.4.5: Wellenspektrum<br />
30 m<br />
µ<br />
300 m<br />
µ<br />
Seite 3-21<br />
3 mm<br />
30 mm<br />
300 mm<br />
Fernsehen<br />
Ultrakurzwelle<br />
3 m<br />
sehr lange Wellen<br />
↓<br />
• geringe Bündelungsfähigkeit<br />
(direkt proportional<br />
zur Frequenz)<br />
⇒ Signal zu schwach<br />
• hohe Reichweite<br />
Kurzwelle<br />
30 m<br />
Mittelwelle<br />
300 m<br />
Langwelle<br />
3 km<br />
Wellenlänge<br />
v<br />
λ
→ Zum Einsatz kommen<br />
a) Mikrowellen (λ = 1 - 10 cm)<br />
b) Wellen des sichtbaren Lichtes<br />
c) Infrarot ( λ ≈ 600 nm)<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Vermessungsskript - Stand : SS2008<br />
Messprinzip: • Sender erzeugt eine elektromagnetische Welle= Trägerwelle<br />
des eigentlichen Messsignals (Modulation mit Messinfos,<br />
s.u.)<br />
• Reflektion durch einen Reflektor<br />
• Detektion durch den Empfänger (im gleichen Gehäuse wie<br />
der Sender)<br />
Modulation: impulsmoduliert Impulsmessverfahren<br />
= Laufzeitverfahren<br />
frequenzmoduliert<br />
Phasenmessverfahren<br />
= Phasenvergleichsverfahren<br />
= Unterschied der Phasenlage zwischen dem<br />
Verlassen des Senders und dem Empfang.<br />
Seite 3-22
Vermessungsskript - Stand : SS2008<br />
a) Impulsmessverfahren Folie : Impulsverfahren<br />
Trägerfrequenz des Messgerätes, elektromagnetische Welle<br />
⇒ Aufmodulation von einem scharf definiertem Impuls<br />
⇒ Messen der Laufzeit t zwischen Aussendung und Empfang<br />
⇒ „Laufzeitverfahren“ :<br />
Zeitmessung<br />
Abb. 3.4.6 : Impulsverfahren<br />
τ<br />
- digital: Digitalzähler zählt Impulse von quarzstabilisiertem<br />
Oszillator zwischen<br />
Start- und Stoppsignal<br />
- analog: Aufladen eines Kondensators durch<br />
einen Konstantstrom<br />
⇒ gespeicherte Ladungsmenge ist<br />
proportional zur Ladezeit !<br />
t<br />
τ = Impulsdauer<br />
t = Taktzeit zwischen<br />
zwei Impulsen<br />
Fortpflanzungsgeschwindigkeit elektromagnetischer Wellen im Vakuum:<br />
c ≈ 300.000 km/sec ⇒ 1<br />
s = ∗c∗ t<br />
2<br />
Ziel:<br />
Streckengenauigkeit von s = 1,5 cm ⇒<br />
t<br />
2 ∗ s 2 ∗ 1 5 cm<br />
−<br />
= =<br />
= 1∗10 c 30 000 000 000 cm<br />
10<br />
,<br />
sec<br />
. . .<br />
⇒ erforderliche Genauigkeit der Laufzeitmessung<br />
⇒ zunächst: kein Einsatz für genaue Messungen<br />
Ausweg:<br />
viele Einzelmessungen und Mittelung<br />
⇒ Auflösung bis in den mm-Bereich !<br />
⇒ Ein Erhöhen des Energiegehaltes des Impulses ermöglicht<br />
→ eine Steigerung der Reichweite<br />
→ eine reflektorlose Distanzmessung (bzw. mit Reflexfolien)<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-23
) Phasenmeßverfahren<br />
Vermessungsskript - Stand : SS2008<br />
Entfernungsmessungen mit Genauigkeiten von 10 -5 bis 10 -6<br />
Folie : Phasenmessverfahren<br />
Auf hochfrequente Trägerwelle:<br />
Aufmodulation einer langperiodischen Schwingung (Amplitudenmodulation)<br />
= Messfrequenz (niederfrequente Modulationswelle)<br />
z.B.: Frequenz 30 MHz (Mega: 10 6 )<br />
⇒ Wellenlänge<br />
300. 000. 000(m/<br />
sec)<br />
λ= = 10m<br />
/ Schwingung<br />
30. 000. 000(<br />
Schwingungen / sec)<br />
1<br />
s = ∗ ( n ∗ λ + R )<br />
2<br />
R = Reststück, genaue Messung durch Phasenmessgerät<br />
n = unbekannte Anzahl von ganzen Schwingungen,<br />
durch Messung/Bestimmung:<br />
Senken der Modulationsfrequenz in dekadischen Frequenzschritten<br />
⇒ aufmodulierte Welle wird immer länger:<br />
λ1 = 10 m , λ2 = 100 m , λ3 = 1.000 m , λ4 = 10.000 m<br />
⇒ Gesamtentfernung:<br />
λ Ablesung<br />
R<br />
10.000 826<br />
1.000 261<br />
100 61,3<br />
10 1,35<br />
2 s = 8261,35<br />
Reichweite : 10 km<br />
(auch größere Entfernungen mit Schätzung der 10er-km)<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Seite 3-24
Vermessungsskript - Stand : SS2008<br />
3.5 Trigonometrische Höhenbestimmung<br />
= indirekte Messung von Höhenunterschieden!<br />
(dagegen: direkte Messung mit Nivellieren bei eingeschränktem ∆h von 3-4 m)<br />
3.5.1 Prinzip<br />
Theodolit mit Aufsatz/<br />
Totalstation<br />
A<br />
z<br />
s´<br />
s<br />
Reflektor/Prisma<br />
z<br />
∆ h<br />
Abb. 3.5.1 Prinzip der Trigonometrischen Höhenmessung<br />
s<br />
sin z =<br />
s'<br />
h<br />
cos z =<br />
s'<br />
∆<br />
⇒<br />
⇒<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
s′ = s ∗<br />
1<br />
sin<br />
∆ h = s′ ∗ cos z<br />
⇓<br />
z<br />
∆ h = s ∗<br />
z<br />
cos<br />
sin<br />
∆hAB = ∆h + i - t<br />
z<br />
HB = HA + i + ∆h – t<br />
Seite 3-25<br />
(über Schrägentfernung)<br />
= s ∗ cot z<br />
(über Horizontalentfernung)<br />
B<br />
i<br />
t<br />
∆ h A<br />
H<br />
B<br />
B<br />
H A
Vermessungsskript - Stand : SS2008<br />
3.5.2 Anwendung der Trigonometrischen Höhenbestimmung auf kurze Entfernungen<br />
gegeben :<br />
gesucht :<br />
Problem :<br />
NN-Höhe von A<br />
(Punkt A)<br />
NN-Höhe von T<br />
(Turm)<br />
h = sT ∗ cot zT<br />
sT muss indirekt<br />
bestimmt<br />
werden<br />
(sT´ kann nicht<br />
beobachtet<br />
werden ...)<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
Instrumentenhorizont<br />
i<br />
A<br />
z T<br />
s<br />
T<br />
s´<br />
T<br />
Projektion der Turmspitze<br />
im Gebäudeinnern<br />
Abb. 3.5.2 Anwendung auf kurze Entfernungen<br />
Seite 3-26<br />
h<br />
HA
Vermessungsskript - Stand : SS2008<br />
a) Turmhöhenbestimmung mit horizontalem Hilfsdreieck<br />
A<br />
b<br />
α<br />
B<br />
β<br />
s<br />
T<br />
1. Hilfsbasis b in der Nähe des Turmes<br />
2. Beobachtung von α in A und β in B , b<br />
3. Sinussatz :<br />
( + )<br />
sin α β sin β<br />
=<br />
b s T<br />
T<br />
Abb. 3.5.3<br />
Horizontales Hilfsdreieck<br />
(Grundriss / Draufsicht)<br />
⇒ sT �<br />
4. ggf. zweite Basis in einem 2. Hilfsdreieck (Kontrolle)<br />
5. HT = HA + i + h<br />
direkt : HA + i ist gegeben<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
indirekt : Instrumentenhorizont = HC + Ablesung<br />
(Übertrag von nahe gelegenem Höhenbolzen<br />
mit aufgestellter Nivellierlatte)<br />
Seite 3-27
Vermessungsskript - Stand : SS2008<br />
b) Turmhöhenbestimmung mit vertikalem Hilfsdreieck<br />
P<br />
2<br />
i<br />
2<br />
s<br />
s 1 2<br />
2<br />
1 =<br />
~ 2 Turmhöhen<br />
Abb. 3.5.4 Vertikale Hilfsdreiecke<br />
1. Auswahl von 2 Hilfspunkten<br />
P 1<br />
i<br />
1<br />
s T<br />
1<br />
z 1<br />
z 2<br />
Instrumentenhorizont<br />
2<br />
Instrumentenhorizont<br />
1<br />
2. Messen der horizontalen Strecke zwischen den Hilfspunkten<br />
3. Bestimmung der Instrumentenhorizonte I1 und I2<br />
4. Beobachten der Zenitwinkel in den Hilfspunkten<br />
5. 2 Bestimmungsgleichungen für die unbekannte Strecke s1 T :<br />
2 ( )<br />
T T<br />
H = I + s ∗ cot z = I + s + s ∗ cot z<br />
T<br />
T<br />
1<br />
⇒ s =<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
⇓<br />
1 1 1 2 1<br />
2<br />
I − I + s ∗ cot z<br />
2 1 1<br />
cot z − cot z<br />
1 2<br />
2<br />
1 2<br />
HT � über P2 ; P1 als Kontrolle ; z2 ≈ 80 gon , z1 ≈ 50 gon<br />
Seite 3-28
Vermessungsskript - Stand : SS2008<br />
3.5.3 Anwendung der Trigonometrischen Höhenbestimmung für große Entfernungen<br />
3.5.3.1 Einfluss der Erdkrümmung<br />
Sehnentangentenwinkel<br />
γ / 2<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
A<br />
Tangente<br />
γ<br />
B<br />
B´<br />
A '<br />
c 1<br />
R<br />
Abb. 3.5.5 Einfluss der Erdkrümmung<br />
mit<br />
B γ<br />
1 A 2<br />
c = s ∗<br />
B<br />
γ<br />
2 =<br />
1<br />
B’<br />
Sehne sA ≈ bA<br />
B ( s A )<br />
s A<br />
⇒ c =<br />
2∗R2 ∗<br />
R<br />
⇒ ∆H ist um c1 zu klein !<br />
Seite 3-29<br />
2<br />
Bezugsebene bei Vernachlässigung<br />
der Erdkrümmung<br />
Sinussatz im oberen Dreieck<br />
:<br />
c1s A<br />
=<br />
sin 2 sin<br />
2<br />
14 2 43<br />
B<br />
( 100 − )<br />
γ γ<br />
γ<br />
= 200−100− 2<br />
im unteren, rechtwinkligen<br />
Dreieck :<br />
sin γ<br />
2<br />
=<br />
s<br />
B<br />
A<br />
2 ∗ R<br />
⇓<br />
Vereinfachung für γ<br />
2<br />
( )<br />
γ γ<br />
2 2<br />
klein :<br />
sin 100 − = cos ≈ 1<br />
sin<br />
≈<br />
γ γ<br />
2 2<br />
⇓<br />
(2) , (3) eingesetzt in (1)<br />
Abschätzung der Größenordnung, um die der Höhenunterschied zu klein ausfällt :<br />
B’<br />
Zielweite [km]<br />
1<br />
5<br />
10<br />
c1 [cm]<br />
7,8<br />
196<br />
785<br />
(1)<br />
(2)<br />
(3)
3.5.3.2 Einfluss der Refraktion<br />
A<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
R<br />
Vermessungsskript - Stand : SS2008<br />
B<br />
c 2<br />
r = 8 R<br />
Abb. 3.5.6 Einfluss der Refraktion<br />
∆H um c2 zu groß !<br />
Seite 3-30<br />
Brechung hin zum dichteren<br />
Medium !<br />
analog :<br />
c<br />
2<br />
=<br />
B ( s A )<br />
2<br />
∗<br />
mit k<br />
= k ∗<br />
r<br />
=<br />
2<br />
R r<br />
⎯ ⎯⎯⎯→<br />
B ( s A )<br />
2<br />
∗<br />
R<br />
(Refraktionskoeffizient k =<br />
R/r ≈ 0,13)<br />
⇓<br />
ca. 1/8 der Auswirkung der<br />
Erdkrümmung<br />
⇒ Verminderung der Wir-<br />
kung der Erdkrümmung um<br />
ca. 1/8 ...<br />
2
Vermessungsskript - Stand : SS2008<br />
Charakterisierung des Refraktionskoeffizienten<br />
abhängig von :<br />
• Luftdichte ⇒ • Luftdruck<br />
• Lufttemperatur<br />
• Luftfeuchtigkeit<br />
beeinflusst von :<br />
• bodennahe<br />
Ausstrahlung<br />
→ offene Wasserflächen<br />
→ Wälder<br />
→ Industriegelände<br />
• regionalen und zeitlichen Schwankungen<br />
innerhalb eines Tages:<br />
kleinste Schwankungen mittags<br />
→ Zenitwinkelbeobachtungen in den Mittagsstunden!<br />
3.5.3.3 Höhenunterschied aus einseitig beobachteten Zenitwinkeln<br />
∆H mit Berücksichtigung von Erdkrümmung und Refraktion<br />
⇓ ⇓<br />
um c1 zu klein um c2 zu groß<br />
∆ H = H − H = s ∗ cot z + c − c + i − t<br />
2 1 1 2<br />
⇓<br />
( )<br />
∆ H = s ∗ cot z + 1 − k ∗<br />
Univ.-Prof. Dr.-Ing. Monika Jarosch<br />
2<br />
s<br />
2 ∗ R<br />
Seite 3-31<br />
+ i − t<br />
s = Horizontalstrecke<br />
c1<br />
=<br />
2<br />
s<br />
2 ∗ R<br />
2<br />
s<br />
c2= k ∗<br />
2 ∗ R<br />
k ≈ 0,13<br />
R ≈ 6370 km













