

KR 30 JET - KUKA Robotics
KR 30 JET - KUKA Robotics
KR 30 JET - KUKA Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
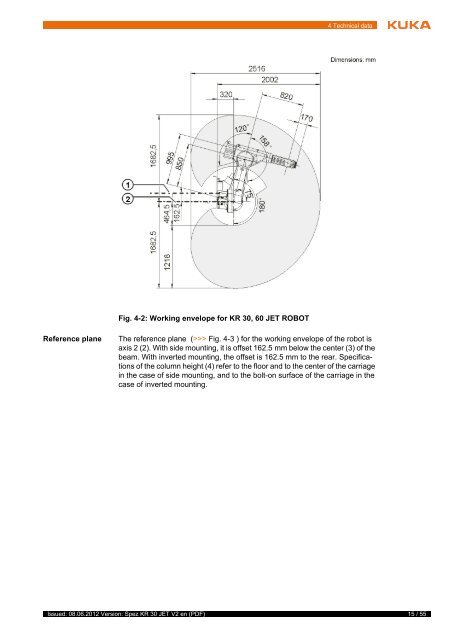
Fig. 4-2: Working envelope for <strong>KR</strong> <strong>30</strong>, 60 <strong>JET</strong> ROBOT<br />
Issued: 08.06.2012 Version: Spez <strong>KR</strong> <strong>30</strong> <strong>JET</strong> V2 en (PDF)<br />
4 Technical data<br />
Reference plane The reference plane (>>> Fig. 4-3 ) for the working envelope of the robot is<br />
axis 2 (2). With side mounting, it is offset 162.5 mm below the center (3) of the<br />
beam. With inverted mounting, the offset is 162.5 mm to the rear. Specifications<br />
of the column height (4) refer to the floor and to the center of the carriage<br />
in the case of side mounting, and to the bolt-on surface of the carriage in the<br />
case of inverted mounting.<br />
15 / 55














