Final Report - Claymore - Grand Valley State University
Final Report - Claymore - Grand Valley State University
Final Report - Claymore - Grand Valley State University

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
allowed the robot controller to monitor its position more accurately, decreasing the<br />
amount of overshoot.<br />
2.2 Performance Testing<br />
Several tests were performed before conducting the individual in-class tests. One<br />
of the first tests was to compare the performance of two gearboxes—the Tamiya High-<br />
Speed Gearbox and the Tamiya High-Power Gearbox. The gearboxes were tested<br />
by supplying each with a range of voltages and weight loads, then measuring the<br />
resulting velocities. It was observed that the high-speed gearbox indeed had higher<br />
velocity, but could not handle the required weight loads. However, the high-power<br />
gearbox met our velocity requirements throughout the voltage range, and was also<br />
capable of handling the expected weight loads.<br />
Once a gearbox had been chosen, the robot was tested on the track. It was<br />
observed that the robot bound with the truck and could not move. This was fixed by<br />
enlarging the slot that the pins go through.<br />
The barrel was tested by supplying 85 psi through a ¼” air hose. Initially, the ball<br />
did not have enough velocity to cross the playing field. The barrel was modified by<br />
covering the holes with electrical tape and retested. This modification gave the ball<br />
enough velocity to cross the field and score a goal.<br />
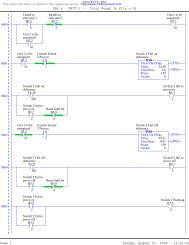
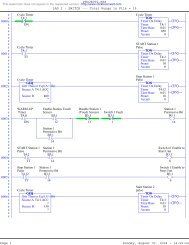
Several tests were performed on the program. Once the program was functioning<br />
properly, there were still several calibration problems. The defensive program was<br />
modified to stop the motor upon reaching the desired destination so that it did not<br />
overshoot. The offensive program was calibrated to find desired shooting positions that<br />
were not blocked by the opposing team’s defensive robot.<br />
2.3 Results of Formal Tests<br />
There were three main in-class tests of the robot’s function. For the first test, the<br />
base of the robot was completed and the robot’s ability to move on the track was<br />
demonstrated. For the second test, the mechanical aspects of both the offensive and<br />
defensive robots were completed. Both robots traversed the path without binding on the<br />
truck and the offensive robot fired a ball with sufficient velocity to score a goal. The goal<br />
9