Final Report - Claymore - Grand Valley State University
Final Report - Claymore - Grand Valley State University
Final Report - Claymore - Grand Valley State University

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
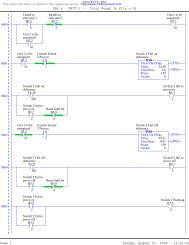
Figure 1.4: Block diagram of system architecture for defensive robot.<br />
1.3 Description of Control Scheme<br />
Figure 2.3 shows a block diagram for the general system architecture for both<br />
robots. Electrical components include the ATMega32 board, an L293D push-pull 4<br />
channel driver (H-Bridge), and the driving motor. A DB-25 connector will supply<br />
positional feedback for the opponent’s robots.<br />
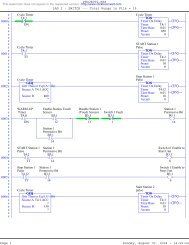
Figure 1.5: Control Block Diagram.<br />
5