

USNO Circular 179 - U.S. Naval Observatory
USNO Circular 179 - U.S. Naval Observatory
USNO Circular 179 - U.S. Naval Observatory

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
PRECESSION & NUTATION 41<br />
an intermediate step in the computations, or the final step where only very low accuracy is needed<br />
(10 arcseconds or worse) and nutation can be ignored.<br />
Thus, a precession transformation is applied to celestial coordinates to convert them from<br />
the mean equator and equinox of J2000.0 to the mean equator and equinox of another date, t.<br />
Nutation is applied to the resulting coordinates to transform them to the true equator and equinox<br />
of t. These transformations should be understood to be inherently geocentric rotations and they<br />
originate in dynamical theories. Generally we will be starting with celestial coordinates in the<br />
GCRS, which are obtained from basic ICRS data by applying the usual algorithms for proper<br />
place. 4 As discussed in Chapter 3, the ICRS is not based on a dynamically defined equator and<br />
equinox and so neither is the GCRS. Therefore, before we apply precession and nutation — and<br />
if we require a final accuracy of better than 0.02 arcsecond — we must first apply the frame bias<br />
correction (section 3.5) to transform the GCRS coordinates to the dynamical mean equator and<br />
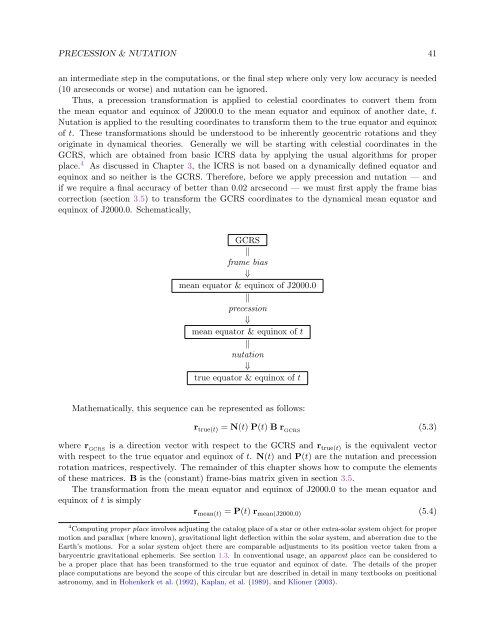
equinox of J2000.0. Schematically,<br />
GCRS<br />
<br />
frame bias<br />
⇓<br />
mean equator & equinox of J2000.0<br />
<br />
precession<br />
⇓<br />
mean equator & equinox of t<br />
<br />
nutation<br />
⇓<br />
true equator & equinox of t<br />
Mathematically, this sequence can be represented as follows:<br />
r true(t) = N(t) P(t) B r GCRS<br />
where rGCRS is a direction vector with respect to the GCRS and rtrue(t) is the equivalent vector<br />
with respect to the true equator and equinox of t. N(t) and P(t) are the nutation and precession<br />
rotation matrices, respectively. The remainder of this chapter shows how to compute the elements<br />
of these matrices. B is the (constant) frame-bias matrix given in section 3.5.<br />
The transformation from the mean equator and equinox of J2000.0 to the mean equator and<br />
equinox of t is simply<br />
(5.4)<br />
r mean(t) = P(t) r mean(J2000.0)<br />
4 Computing proper place involves adjusting the catalog place of a star or other extra-solar system object for proper<br />
motion and parallax (where known), gravitational light deflection within the solar system, and aberration due to the<br />
Earth’s motions. For a solar system object there are comparable adjustments to its position vector taken from a<br />
barycentric gravitational ephemeris. See section 1.3. In conventional usage, an apparent place can be considered to<br />
be a proper place that has been transformed to the true equator and equinox of date. The details of the proper<br />
place computations are beyond the scope of this circular but are described in detail in many textbooks on positional<br />
astronomy, and in Hohenkerk et al. (1992), Kaplan, et al. (1989), and Klioner (2003).<br />
(5.3)