

USNO Circular 179 - U.S. Naval Observatory
USNO Circular 179 - U.S. Naval Observatory
USNO Circular 179 - U.S. Naval Observatory

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
MODELING THE EARTH’S ROTATION 57<br />
Equinox-Based Transformation<br />
ITRS or WGS 84<br />
<br />
polar motion<br />
⇓<br />
Eϖ — Terrestrial Intermediate Ref. System<br />
<br />
Greenwich apparent sidereal time<br />
⇓<br />
E Υ — true equator & equinox<br />
<br />
equinox-based rotation for<br />
nutation + precession + frame bias<br />
⇓<br />
GCRS<br />
CIO-Based Transformation<br />
ITRS or WGS 84<br />
<br />
polar motion<br />
⇓<br />
Eϖ — Terrestrial Intermediate Ref. System<br />
<br />
Earth Rotation Angle<br />
⇓<br />
Eσ — Celestial Intermediate Ref. System<br />
<br />
CIO-based rotation for<br />
nutation + precession + frame bias<br />
⇓<br />
GCRS<br />
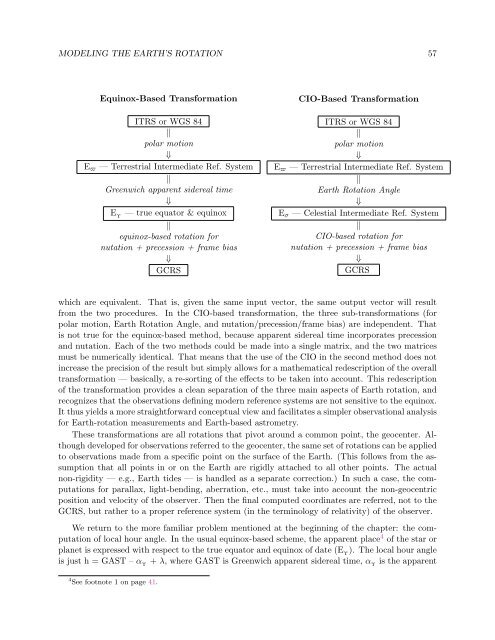
which are equivalent. That is, given the same input vector, the same output vector will result<br />
from the two procedures. In the CIO-based transformation, the three sub-transformations (for<br />
polar motion, Earth Rotation Angle, and nutation/precession/frame bias) are independent. That<br />
is not true for the equinox-based method, because apparent sidereal time incorporates precession<br />
and nutation. Each of the two methods could be made into a single matrix, and the two matrices<br />
must be numerically identical. That means that the use of the CIO in the second method does not<br />
increase the precision of the result but simply allows for a mathematical redescription of the overall<br />
transformation — basically, a re-sorting of the effects to be taken into account. This redescription<br />
of the transformation provides a clean separation of the three main aspects of Earth rotation, and<br />
recognizes that the observations defining modern reference systems are not sensitive to the equinox.<br />
It thus yields a more straightforward conceptual view and facilitates a simpler observational analysis<br />
for Earth-rotation measurements and Earth-based astrometry.<br />
These transformations are all rotations that pivot around a common point, the geocenter. Although<br />
developed for observations referred to the geocenter, the same set of rotations can be applied<br />
to observations made from a specific point on the surface of the Earth. (This follows from the assumption<br />
that all points in or on the Earth are rigidly attached to all other points. The actual<br />
non-rigidity — e.g., Earth tides — is handled as a separate correction.) In such a case, the computations<br />
for parallax, light-bending, aberration, etc., must take into account the non-geocentric<br />
position and velocity of the observer. Then the final computed coordinates are referred, not to the<br />
GCRS, but rather to a proper reference system (in the terminology of relativity) of the observer.<br />
We return to the more familiar problem mentioned at the beginning of the chapter: the computation<br />
of local hour angle. In the usual equinox-based scheme, the apparent place 4 of the star or<br />
planet is expressed with respect to the true equator and equinox of date (E Υ ). The local hour angle<br />
is just h = GAST – α Υ + λ, where GAST is Greenwich apparent sidereal time, α Υ is the apparent<br />
4 See footnote 1 on page 41.