A Displacement Metric for Finite Sets of Rigid Body Displacements
A Displacement Metric for Finite Sets of Rigid Body Displacements
A Displacement Metric for Finite Sets of Rigid Body Displacements

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
F<br />
T1<br />
T2<br />
PF<br />
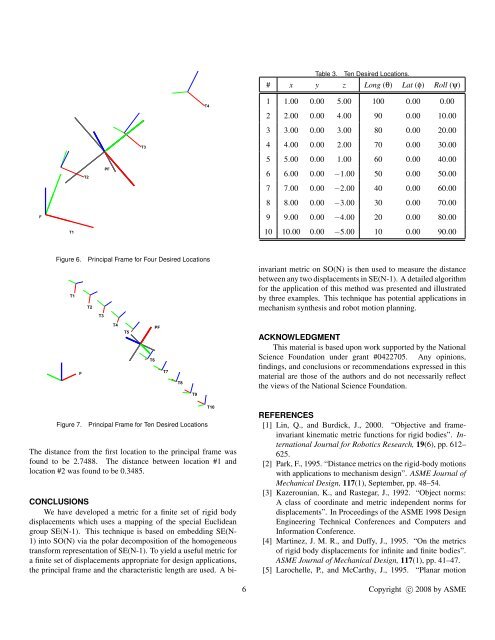
Figure 6. Principal Frame <strong>for</strong> Four Desired Locations<br />
T1<br />
F<br />
T2<br />
T3<br />
T4<br />
T5<br />
Figure 7. Principal Frame <strong>for</strong> Ten Desired Locations<br />
The distance from the first location to the principal frame was<br />
found to be 2.7488. The distance between location #1 and<br />
location #2 was found to be 0.3485.<br />
CONCLUSIONS<br />
We have developed a metric <strong>for</strong> a finite set <strong>of</strong> rigid body<br />
displacements which uses a mapping <strong>of</strong> the special Euclidean<br />
group SE(N-1). This technique is based on embedding SE(N-<br />
1) into SO(N) via the polar decomposition <strong>of</strong> the homogeneous<br />
trans<strong>for</strong>m representation <strong>of</strong> SE(N-1). To yield a useful metric <strong>for</strong><br />
a finite set <strong>of</strong> displacements appropriate <strong>for</strong> design applications,<br />
the principal frame and the characteristic length are used. A bi-<br />
T3<br />
T6<br />
PF<br />
T7<br />
T8<br />
T9<br />
T4<br />
T10<br />
Table 3. Ten Desired Locations.<br />
# x y z Long (θ) Lat (φ) Roll (ψ)<br />
1 1.00 0.00 5.00 100 0.00 0.00<br />
2 2.00 0.00 4.00 90 0.00 10.00<br />
3 3.00 0.00 3.00 80 0.00 20.00<br />
4 4.00 0.00 2.00 70 0.00 30.00<br />
5 5.00 0.00 1.00 60 0.00 40.00<br />
6 6.00 0.00 −1.00 50 0.00 50.00<br />
7 7.00 0.00 −2.00 40 0.00 60.00<br />
8 8.00 0.00 −3.00 30 0.00 70.00<br />
9 9.00 0.00 −4.00 20 0.00 80.00<br />
10 10.00 0.00 −5.00 10 0.00 90.00<br />
invariant metric on SO(N) is then used to measure the distance<br />
between any two displacements in SE(N-1). A detailed algorithm<br />
<strong>for</strong> the application <strong>of</strong> this method was presented and illustrated<br />
by three examples. This technique has potential applications in<br />
mechanism synthesis and robot motion planning.<br />
ACKNOWLEDGMENT<br />
This material is based upon work supported by the National<br />
Science Foundation under grant #0422705. Any opinions,<br />
findings, and conclusions or recommendations expressed in this<br />
material are those <strong>of</strong> the authors and do not necessarily reflect<br />
the views <strong>of</strong> the National Science Foundation.<br />
REFERENCES<br />
[1] Lin, Q., and Burdick, J., 2000. “Objective and frameinvariant<br />
kinematic metric functions <strong>for</strong> rigid bodies”. International<br />
Journal <strong>for</strong> Robotics Research, 19(6), pp. 612–<br />
625.<br />
[2] Park, F., 1995. “Distance metrics on the rigid-body motions<br />
with applications to mechanism design”. ASME Journal <strong>of</strong><br />
Mechanical Design, 117(1), September, pp. 48–54.<br />
[3] Kazerounian, K., and Rastegar, J., 1992. “Object norms:<br />
A class <strong>of</strong> coordinate and metric independent norms <strong>for</strong><br />
displacements”. In Proceedings <strong>of</strong> the ASME 1998 Design<br />
Engineering Technical Conferences and Computers and<br />
In<strong>for</strong>mation Conference.<br />
[4] Martinez, J. M. R., and Duffy, J., 1995. “On the metrics<br />
<strong>of</strong> rigid body displacements <strong>for</strong> infinite and finite bodies”.<br />
ASME Journal <strong>of</strong> Mechanical Design, 117(1), pp. 41–47.<br />
[5] Larochelle, P., and McCarthy, J., 1995. “Planar motion<br />
6 Copyright c○ 2008 by ASME