- Page 1 and 2: TRANSACTION-ORIENTED SIMULATION IN
- Page 3 and 4: Table of Content II Table of Conten
- Page 5 and 6: IV Table of Content 6 VALIDATION OF
- Page 7 and 8: Figures VI Figures Figure 1: Ad Hoc
- Page 9 and 10: Tables VIII Tables Table 1: Change
- Page 11 and 12: 2 Introduction synchronisation algo
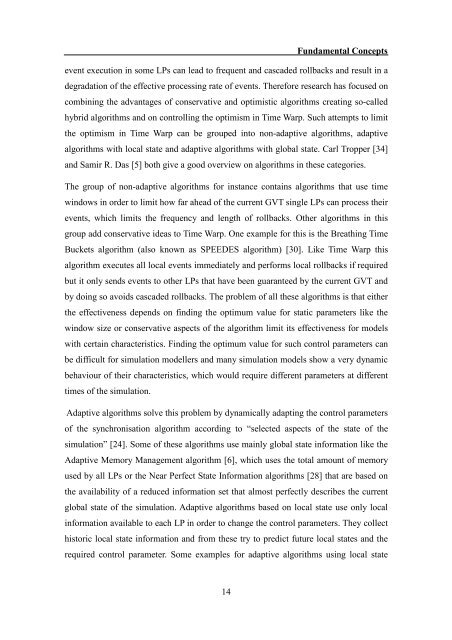
- Page 13 and 14: 2 Fundamental Concepts Fundamental
- Page 15 and 16: Figure 1: Ad Hoc Grid architecture
- Page 17 and 18: 8 Fundamental Concepts In continuou
- Page 19 and 20: 10 Fundamental Concepts Two other a
- Page 21: 12 Fundamental Concepts known as st
- Page 25 and 26: 3 Ad Hoc Grid Aspects 16 Ad Hoc Gri
- Page 27 and 28: 18 Ad Hoc Grid Aspects resources an
- Page 29 and 30: 20 Ad Hoc Grid Aspects means that a
- Page 31 and 32: Parallel Transaction-oriented Simul
- Page 33 and 34: 24 Parallel Transaction-oriented Si
- Page 35 and 36: 4.2 Synchronisation algorithm 26 Pa
- Page 37 and 38: 28 Parallel Transaction-oriented Si
- Page 39 and 40: 30 Parallel Transaction-oriented Si
- Page 41 and 42: 32 Parallel Transaction-oriented Si
- Page 43 and 44: 34 Parallel Transaction-oriented Si
- Page 45 and 46: 36 Parallel Transaction-oriented Si
- Page 47 and 48: 38 Parallel Transaction-oriented Si
- Page 49 and 50: 5 Implementation 40 Implementation
- Page 51 and 52: 42 Implementation confirm a provisi
- Page 53 and 54: 44 Implementation large numerical p
- Page 55 and 56: 46 Implementation A detailed descri
- Page 57 and 58: 48 Implementation But in a parallel
- Page 59 and 60: 50 Implementation GPSS test models
- Page 61 and 62: Simulation Controller side 52 Imple
- Page 63 and 64: 54 Implementation technique describ
- Page 65 and 66: Implementation Euclidean distance b
- Page 67 and 68: 58 Implementation chain at the corr
- Page 69 and 70: 60 Implementation The algorithm wil
- Page 71 and 72: No Start Is Active Object body acti
- Page 73 and 74:
5.3.2 GVT Calculation and End of Si
- Page 75 and 76:
66 Implementation provisional simul
- Page 77 and 78:
Implementation relatively basic per
- Page 79 and 80:
70 Implementation log4j.logger.para
- Page 81 and 82:
proactive-log4j 72 Implementation T
- Page 83 and 84:
74 Implementation Memory Allocation
- Page 85 and 86:
76 Validation of the Parallel Simul
- Page 87 and 88:
78 Validation of the Parallel Simul
- Page 89 and 90:
80 Validation of the Parallel Simul
- Page 91 and 92:
82 Validation of the Parallel Simul
- Page 93 and 94:
6.4 Validation 4 84 Validation of t
- Page 95 and 96:
86 Validation of the Parallel Simul
- Page 97 and 98:
… LpccEnabled=true LpccClusterNum
- Page 99 and 100:
Validation 5.2 Validation of the Pa
- Page 101 and 102:
92 Validation of the Parallel Simul
- Page 103 and 104:
94 Validation of the Parallel Simul
- Page 105 and 106:
7 Conclusions 96 Conclusions Even s
- Page 107 and 108:
References 98 References [1] Amin K
- Page 109 and 110:
[19] Krafft G. Parallelisation of T
- Page 111 and 112:
Appendix A: Detailed GPSS Syntax 10
- Page 113 and 114:
Reserved word: DEPART Syntax: [] DE
- Page 115 and 116:
Reserved word: SEIZE Syntax: [] SEI
- Page 117 and 118:
Setting: LpccClusterNumber Default
- Page 119 and 120:
Appendix C: Simulator log4j loggers
- Page 121 and 122:
Logger: parallelJavaGpssSimulator.l
- Page 123 and 124:
114 Appendix D: Structure of the at
- Page 125 and 126:
Appendix E: Documentation of select
- Page 127 and 128:
Appendix E: Documentation of select
- Page 129 and 130:
Appendix E: Documentation of select
- Page 131 and 132:
!"#"$$%$&"'"(!))*+,-$"./#0$! 1$"))
- Page 133 and 134:
Appendix E: Documentation of select
- Page 135 and 136:
!/+/.7/8$ Appendix E: Documentation
- Page 137 and 138:
Returns: Appendix E: Documentation
- Page 139 and 140:
!"#$%&''$()*)")$ +',)$-)$. #,/. !"#
- Page 141 and 142:
!"#$%&'()#%*+,"-*.# Appendix E: Doc
- Page 143 and 144:
Appendix E: Documentation of select
- Page 145 and 146:
Appendix E: Documentation of select
- Page 147 and 148:
Appendix E: Documentation of select
- Page 149 and 150:
Appendix E: Documentation of select
- Page 151 and 152:
Appendix E: Documentation of select
- Page 153 and 154:
Constructor Detail !"#$%&'$(#$)*$%+
- Page 155 and 156:
Appendix E: Documentation of select
- Page 157 and 158:
Validation 1.1, output of simulate:
- Page 159 and 160:
Validation 2, output of LP: Appendi
- Page 161 and 162:
Appendix F: Validation output logs
- Page 163 and 164:
Validation 2, output of simulate: A
- Page 165 and 166:
Validation 3.1, output of LP1: Appe
- Page 167 and 168:
Appendix F: Validation output logs
- Page 169 and 170:
Validation 3.1, output of LP2: Appe
- Page 171 and 172:
Validation 3.1, output of simulate:
- Page 173 and 174:
Validation 4, output of LP1: Append
- Page 175 and 176:
Appendix F: Validation output logs
- Page 177 and 178:
Appendix F: Validation output logs
- Page 179 and 180:
simulation for time 2000) (628) 20:
- Page 181 and 182:
Appendix F: Validation output logs
- Page 183 and 184:
Appendix F: Validation output logs
- Page 185 and 186:
Appendix F: Validation output logs
- Page 187 and 188:
Validation 4, output of simulate: A
- Page 189 and 190:
Appendix F: Validation output logs
- Page 191 and 192:
Validation 5.1, output of LP1: Appe
- Page 193 and 194:
Appendix F: Validation output logs
- Page 195 and 196:
(135) 19:37:56,477 Total transactio
- Page 197 and 198:
Appendix F: Validation output logs
- Page 199 and 200:
Appendix F: Validation output logs
- Page 201 and 202:
Appendix F: Validation output logs
- Page 203 and 204:
Appendix F: Validation output logs
- Page 205 and 206:
Validation 5.1, output of simulate:
- Page 207 and 208:
(68) 19:37:56,619 by the transactio
- Page 209 and 210:
Appendix F: Validation output logs
- Page 211 and 212:
Validation 5.2, output of LP2: Appe
- Page 213 and 214:
Appendix F: Validation output logs
- Page 215 and 216:
Appendix F: Validation output logs
- Page 217 and 218:
Appendix F: Validation output logs
- Page 219 and 220:
Validation 6.1, output of LP1: Appe
- Page 221 and 222:
Appendix F: Validation output logs
- Page 223 and 224:
Appendix F: Validation output logs
- Page 225 and 226:
Appendix F: Validation output logs
- Page 227 and 228:
(1295) 14:25:22,740 Simulation stop
- Page 229 and 230:
Appendix F: Validation output logs
- Page 231 and 232:
Appendix F: Validation output logs
- Page 233 and 234:
Appendix F: Validation output logs
- Page 235 and 236:
Validation 6.1, output of simulate:
- Page 237 and 238:
(68) 14:25:22,888 by the transactio
- Page 239 and 240:
Validation 6.2, output of LP2: (1)
- Page 241:
(32) (1,2) 0 765 Block: TRANSFER 0.