3-Phase BLDC Motor Control with Sensorless Back EMF ... - Freescale
3-Phase BLDC Motor Control with Sensorless Back EMF ... - Freescale
3-Phase BLDC Motor Control with Sensorless Back EMF ... - Freescale

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
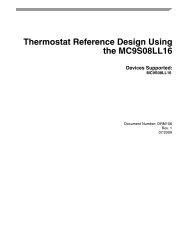
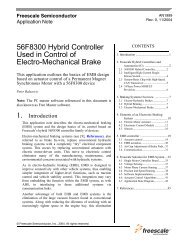
<strong>Control</strong> Technique<br />
at steady-state condition<br />
<strong>with</strong> regular <strong>Back</strong>-<strong>EMF</strong> feedback<br />
Stator magnetic field Rotor magnetic<br />
field<br />
(created by PM)<br />
Border of<br />
stator pole<br />
Rotor movement<br />
during one<br />
commutation<br />
Zero crossing<br />
edge indicator<br />
<strong>Motor</strong> is Running<br />
Direction of<br />
<strong>Phase</strong> current<br />
<strong>Phase</strong> winding<br />
<strong>Motor</strong> is Starting<br />
Alignment Stage<br />
The rotor position is stabilized by<br />
applying PWM signals to only two<br />
motor phases<br />
Starting (B<strong>EMF</strong> Acquisition)<br />
The two fast (faster then the rotor can<br />
move) commutations are applied to<br />
create an angular difference of the<br />
stator magnetic field and rotor<br />
magnetic field.<br />
The <strong>Back</strong>-<strong>EMF</strong> feedback is tested.<br />
When the <strong>Back</strong>-<strong>EMF</strong> zero crossing<br />
is recognized the time of new<br />
commutation is evaluated. Until at<br />
least two successive <strong>Back</strong>-<strong>EMF</strong> zero<br />
crossings are received the exact<br />
commutation time can not be<br />
calculated. Therefore the<br />
commutation is done in advance in<br />
order to assure that successive<br />
<strong>Back</strong>-<strong>EMF</strong> zero crossing events<br />
would not be missed.<br />
Running<br />
Figure 5-9. Vectors of Magnetic Fields<br />
3-<strong>Phase</strong> <strong>BLDC</strong> <strong>Motor</strong> <strong>Control</strong>, Rev. 1<br />
After several <strong>Back</strong>-<strong>EMF</strong> zero<br />
crossing events the exact<br />
commutation time is calculated. The<br />
commutation process is adjusted.<br />
<strong>Motor</strong> is running <strong>with</strong> regular<br />
<strong>Back</strong>-<strong>EMF</strong> feedback.<br />
26 <strong>Freescale</strong> Semiconductor<br />
Preliminary